Robustly Constrained Dynamic Games for Uncertain Nonlinear Dynamics
Pith reviewed 2026-05-18 15:22 UTC · model grok-4.3
The pith
Each agent designs a nominal trajectory and causal affine error feedback law to minimize its cost while guaranteeing all constraints hold under worst-case noise realizations.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By leveraging system-level synthesis to construct nonlinear safety certificates for state-dependent additive noise and nonlinear constraints, each agent can jointly optimize a nominal trajectory and a causal affine error feedback law that minimizes its own cost while ensuring its own constraints and all shared constraints are satisfied for every possible noise realization; the resulting collection of plans and controllers defines a robustly constrained Nash equilibrium that an iterative best-response algorithm approximates and that produces collision-free closed-loop trajectories in both simulation and hardware.
What carries the argument
The robustly constrained Nash equilibrium (RCNE), obtained by equipping each agent's cost-minimization problem with SLS-derived nonlinear safety certificates that enforce robust satisfaction of nonlinear constraints under worst-case state-dependent noise.
If this is right
- Closed-loop trajectories generated by the RCNE satisfy all agent-specific and shared constraints for every admissible noise sequence.
- The method produces collision-free behavior in high-dimensional nonlinear multi-robot settings where open-loop game plans violate constraints.
- The iterative best-response procedure yields an approximate RCNE for practical numbers of agents with state-dependent dynamics noise.
- The same certificates and feedback laws transfer from simulation to hardware experiments without loss of the robust constraint guarantees.
Where Pith is reading between the lines
- The same SLS-based certificates could be recomputed online if the noise model is updated from new sensor data.
- Decentralized variants might replace the central IBR loop with local message passing while preserving the robust equilibrium property.
- Replacing worst-case noise bounds with sampled scenarios would produce less conservative but still probabilistically robust plans.
Load-bearing premise
System-level synthesis can generate nonlinear safety certificates that remain valid for every possible realization of the state-dependent additive noise and under the given nonlinear constraints.
What would settle it
Execute the iterative best-response algorithm to obtain nominal trajectories and feedback laws, then apply a noise sequence chosen to drive the closed-loop state into a constraint violation; observation of any violated constraint during rollout falsifies the robust guarantee.
Figures



read the original abstract
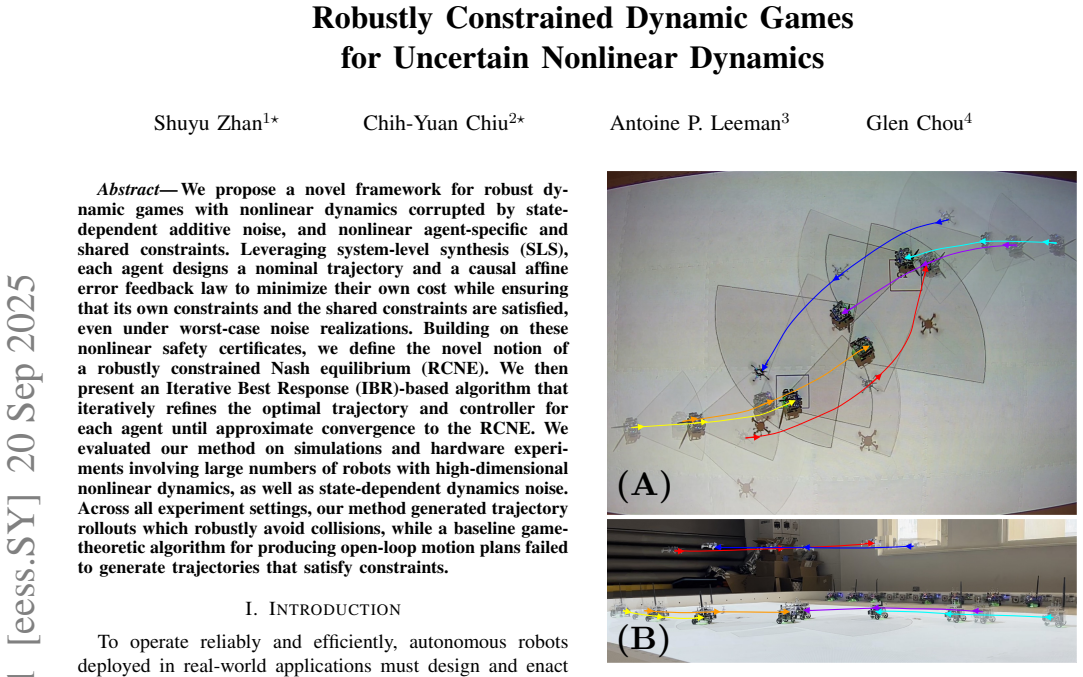
We propose a novel framework for robust dynamic games with nonlinear dynamics corrupted by state-dependent additive noise, and nonlinear agent-specific and shared constraints. Leveraging system-level synthesis (SLS), each agent designs a nominal trajectory and a causal affine error feedback law to minimize their own cost while ensuring that its own constraints and the shared constraints are satisfied, even under worst-case noise realizations. Building on these nonlinear safety certificates, we define the novel notion of a robustly constrained Nash equilibrium (RCNE). We then present an Iterative Best Response (IBR)-based algorithm that iteratively refines the optimal trajectory and controller for each agent until approximate convergence to the RCNE. We evaluated our method on simulations and hardware experiments involving large numbers of robots with high-dimensional nonlinear dynamics, as well as state-dependent dynamics noise. Across all experiment settings, our method generated trajectory rollouts which robustly avoid collisions, while a baseline game-theoretic algorithm for producing open-loop motion plans failed to generate trajectories that satisfy constraints.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a framework for robust dynamic games with nonlinear dynamics subject to state-dependent additive noise and nonlinear agent-specific plus shared constraints. Each agent uses system-level synthesis (SLS) to compute a nominal trajectory together with a causal affine error feedback law that minimizes its cost while enforcing robust satisfaction of its own and the shared constraints for all admissible noise realizations. The authors define the robustly constrained Nash equilibrium (RCNE) and give an iterative best-response (IBR) algorithm that refines each agent's trajectory and controller until approximate convergence. The method is demonstrated in simulation and on hardware with fleets of robots whose dynamics are high-dimensional and nonlinear, where the proposed trajectories remain collision-free while an open-loop game baseline violates constraints.
Significance. If the nonlinear safety certificates are shown to be valid, the combination of SLS-based robust feedback with a game-theoretic equilibrium concept would be a useful contribution to multi-agent planning under uncertainty. The hardware validation with large numbers of robots and explicit state-dependent noise constitutes a concrete strength that goes beyond purely theoretical or simulation-only studies.
major comments (2)
- [§4.1–4.2] §4.1–4.2 (Robust safety certificate construction): the claim that the SLS-derived causal affine feedback yields nonlinear safety certificates valid for all realizations of state-dependent additive noise requires an explicit treatment of the higher-order remainder terms in the error dynamics. Standard SLS supplies exact closed-loop maps only for linear systems; without a Lipschitz bound on the nonlinear perturbation or a remainder estimate that is propagated through the nonlinear constraint functions, the guarantee that shared collision constraints remain satisfied under worst-case noise sequences is not yet established.
- [Definition of RCNE (around Eq. (12)–(15))] Definition of RCNE (around Eq. (12)–(15)): the equilibrium notion is defined directly in terms of the SLS certificates, but the paper does not show that the resulting fixed-point of the IBR procedure is independent of the particular linearization point or the choice of SLS parameterization. A concrete counter-example or sensitivity analysis with respect to the linearization radius would strengthen the claim that the computed RCNE is robust rather than an artifact of the local approximation.
minor comments (2)
- [§3] Notation for the noise set W(x) is introduced without an explicit statement of whether it is assumed compact and convex for all x; adding this assumption (or a reference to where it appears) would clarify the well-posedness of the worst-case optimization.
- [Hardware experiments] In the hardware experiment section, the quantitative metrics (e.g., minimum observed distance to obstacles under noise, number of constraint violations) should be reported in a table rather than only qualitatively stated as “robustly avoid collisions.”
Simulated Author's Rebuttal
We thank the referee for their constructive and detailed comments. We address each major comment below, indicating the revisions we plan to incorporate to strengthen the manuscript.
read point-by-point responses
-
Referee: [§4.1–4.2] §4.1–4.2 (Robust safety certificate construction): the claim that the SLS-derived causal affine feedback yields nonlinear safety certificates valid for all realizations of state-dependent additive noise requires an explicit treatment of the higher-order remainder terms in the error dynamics. Standard SLS supplies exact closed-loop maps only for linear systems; without a Lipschitz bound on the nonlinear perturbation or a remainder estimate that is propagated through the nonlinear constraint functions, the guarantee that shared collision constraints remain satisfied under worst-case noise sequences is not yet established.
Authors: We appreciate the referee highlighting this point. While §4.1–4.2 sketches the certificate construction using the SLS parameterization for the nominal and error dynamics, we agree that an explicit treatment of the higher-order nonlinear remainder terms is necessary to rigorously establish validity for all noise realizations. In the revised manuscript we will add a dedicated derivation that assumes the nonlinear dynamics are Lipschitz continuous with a known constant and propagates a remainder bound through the constraint functions. This will yield tightened robust constraints that guarantee satisfaction under the assumed noise model. revision: yes
-
Referee: [Definition of RCNE (around Eq. (12)–(15))] Definition of RCNE (around Eq. (12)–(15)): the equilibrium notion is defined directly in terms of the SLS certificates, but the paper does not show that the resulting fixed-point of the IBR procedure is independent of the particular linearization point or the choice of SLS parameterization. A concrete counter-example or sensitivity analysis with respect to the linearization radius would strengthen the claim that the computed RCNE is robust rather than an artifact of the local approximation.
Authors: We agree that the RCNE is defined relative to a chosen linearization point and SLS parameterization, as is standard for local approximations of nonlinear problems. The IBR algorithm computes a fixed point of the best-response map under these local models; we do not claim global independence from the linearization. To address the concern, the revised manuscript will include a sensitivity study in the experimental section that varies the linearization radius and reports the resulting changes in trajectories and constraint satisfaction. This will demonstrate that the computed solutions remain practically robust within a reasonable range of radii. revision: partial
Circularity Check
No significant circularity; derivation relies on external SLS framework
full rationale
The paper constructs RCNE by applying standard system-level synthesis to produce nominal trajectories and causal affine feedback laws that certify robust satisfaction of nonlinear constraints under state-dependent noise. The IBR algorithm then iteratively computes approximate equilibria using these certificates. No equation or definition reduces by construction to a fitted parameter, self-citation chain, or renamed input; the safety certificates are presented as outputs of SLS rather than presupposed. The framework is self-contained against the cited SLS literature and does not invoke uniqueness theorems or ansatzes from the authors' prior work to close the loop.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption System-level synthesis can produce causal affine error feedback laws that enforce nonlinear constraints under worst-case state-dependent additive noise.
invented entities (1)
-
Robustly constrained Nash equilibrium (RCNE)
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Leveraging system-level synthesis (SLS), each agent designs a nominal trajectory and a causal affine error feedback law ... nonlinear safety certificates ... robustly constrained Nash equilibrium (RCNE)
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We extend the system-level synthesis (SLS) framework for robust control to a class of multi-agent dynamic games with nonlinear dynamics corrupted with state-dependent additive noise
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Forward citations
Cited by 2 Pith papers
-
VISION-SLS: Safe Perception-Based Control from Learned Visual Representations via System Level Synthesis
VISION-SLS learns visual features with state-dependent error bounds and optimizes causal affine output-feedback policies via system level synthesis to achieve safe nonlinear control from RGB images.
-
Safe Large-Scale Robust Nonlinear MPC in Milliseconds via Reachability-Constrained System Level Synthesis on the GPU
GPU-SLS computes safe robust nonlinear MPC policies online in ~20 ms for up to 75D systems by reachability-constrained system level synthesis accelerated via custom GPU QP solvers.
Reference graph
Works this paper leans on
-
[1]
The Compu- tation of Approximate Generalized Feedback Nash Equilibria,
F. Laine, D. Fridovich-Keil, C.-Y . Chiu, and C. Tomlin, “The Compu- tation of Approximate Generalized Feedback Nash Equilibria,”SIAM Journal on Optimization, vol. 33, no. 1, 2023
work page 2023
-
[2]
T. Kavuncu, A. Yaraneri, and N. Mehr, “Potential iLQR: A Potential- Minimizing Controller for Planning Multi-Agent Interactive Trajecto- ries,”Robotics: Science and Systems, 07 2021
work page 2021
-
[3]
Efficient Constrained Multi-Agent Trajectory Optimization Using Dynamic Potential Games,
M. Bhatt, Y . Jia, and N. Mehr, “Efficient Constrained Multi-Agent Trajectory Optimization Using Dynamic Potential Games,” inInter- national Conference on Intelligent Robots and Systems (IROS), 2023
work page 2023
-
[4]
Cooperative Pursuit with V oronoi Partitions,
Z. Zhou, W. Zhang, J. Ding, H. Huang, D. M. Stipanovi ´c, and C. J. Tomlin, “Cooperative Pursuit with V oronoi Partitions,”Automatica, vol. 72, 2016
work page 2016
-
[5]
Contingency Games for Multi-Agent Interaction,
L. Peters, A. Bajcsy, C.-Y . Chiu, D. Fridovich-Keil, F. Laine, L. Fer- ranti, and J. Alonso-Mora, “Contingency Games for Multi-Agent Interaction,”Robotics and Automation Letters, vol. 9, no. 3, 2024
work page 2024
-
[6]
T. Bas ¸ar and G. J. Olsder,Dynamic Noncooperative Game Theory. SIAM, 1998
work page 1998
-
[7]
Differential Games, Parts 1-4,
R. Isaacs, “Differential Games, Parts 1-4,”The Rand Corpration, Research Memorandums RM-1391, RM-1411, RM-1486, vol. 55, 1954
work page 1954
-
[8]
D. Fridovich-Keil, E. Ratner, L. Peters, A. Dragan, and C. J. Tomlin, “Efficient Iterative Linear-Quadratic Approximations for Nonlinear Multi-Player General-Sum Differential Games,”ICRA, 2020
work page 2020
-
[9]
ALGAMES: a Fast Augmented Lagrangian Solver for Constrained Dynamic Games,
S. LeCleac’h, M. Schwager, and Z. Manchester, “ALGAMES: a Fast Augmented Lagrangian Solver for Constrained Dynamic Games,” Auton. Robots, vol. 46, no. 1, 2022
work page 2022
-
[10]
A time-dependent Hamilton- Jacobi Formulation of Reachable Sets for Continuous Dynamic Games,
I. Mitchell, A. Bayen, and C. Tomlin, “A time-dependent Hamilton- Jacobi Formulation of Reachable Sets for Continuous Dynamic Games,”IEEE Transactions on Automatic Control, vol. 50, no. 7, pp. 947–957, 2005
work page 2005
-
[11]
Stochastic Dynamic Games in Belief Space,
W. Schwarting, A. Pierson, S. Karaman, and D. Rus, “Stochastic Dynamic Games in Belief Space,”IEEE Transactions on Robotics, vol. 37, no. 6, 2021
work page 2021
-
[12]
A Real-Time Game Theoretic Planner for Autonomous Two-Player Drone Racing,
R. Spica, E. Cristofalo, Z. Wang, E. Montijano, and M. Schwager, “A Real-Time Game Theoretic Planner for Autonomous Two-Player Drone Racing,”IEEE Transactions on Robotics, vol. 36, no. 5, 2020
work page 2020
-
[13]
GTP-SLAM: Game-Theoretic Priors for Simultaneous Localization and Mapping in Multi-Agent Scenarios,
C.-Y . Chiu and D. Fridovich-Keil, “GTP-SLAM: Game-Theoretic Priors for Simultaneous Localization and Mapping in Multi-Agent Scenarios,” inConference on Decision and Control (CDC), 2022
work page 2022
-
[14]
SLS-BRD: A System-level Approach to Seeking Generalised Feedback Nash Equilibria,
O. B. Neto, M. Mulas, and F. Corona, “SLS-BRD: A System-level Approach to Seeking Generalised Feedback Nash Equilibria,”IEEE Transactions on Automatic Control, 2025
work page 2025
-
[15]
J. Anderson, J. C. Doyle, S. H. Low, and N. Matni, “System Level Synthesis,”Annual Reviews in Control, vol. 47, 2019
work page 2019
-
[16]
Distributed and Localized Model-Predictive Control Part I: Synthesis and Implemen- tation,
C. A. Alonso, J. S. Li, J. Anderson, and N. Matni, “Distributed and Localized Model-Predictive Control Part I: Synthesis and Implemen- tation,”IEEE Transactions on Control of Network Systems, 2023
work page 2023
-
[17]
Robust Model Predictive Control of Time-Delay Systems through System Level Synthesis,
S. Chen, N.-Y . Li, V . M. Preciado, and N. Matni, “Robust Model Predictive Control of Time-Delay Systems through System Level Synthesis,” in2022 IEEE 61st Conference on Decision and Control (CDC), 2022
work page 2022
-
[18]
Robust Nonlinear Optimal Control via System Level Synthesis,
A. P. Leeman, J. K ¨ohler, A. Zanelli, S. Bennani, and M. N. Zeilinger, “Robust Nonlinear Optimal Control via System Level Synthesis,”IEEE Transactions on Automatic Control, vol. 70, no. 7, 2025
work page 2025
-
[19]
A. P. Leeman, J. Sieber, S. Bennani, and M. N. Zeilinger, “Robust Optimal Control for Nonlinear Systems with Parametric Uncertainties via System Level Synthesis,” in2023 62nd IEEE Conference on Decision and Control (CDC), 2023
work page 2023
-
[20]
Predictive Safety Filter using System Level Synthesis,
A. Leeman, J. K ¨ohler, S. Bennani, and M. N. Zeilinger, “Predictive Safety Filter using System Level Synthesis,” inL4DC, 2023
work page 2023
-
[21]
Urban Driving Games With Lexicographic Preferences and Socially Efficient Nash Equilibria,
A. Zanardi, E. Mion, M. Bruschetta, S. Bolognani, A. Censi, and E. Frazzoli, “Urban Driving Games With Lexicographic Preferences and Socially Efficient Nash Equilibria,”IEEE RA-L, 2021
work page 2021
-
[22]
C. Knuth, G. Chou, J. Reese, and J. Moore, “Statistical safety and robustness guarantees for feedback motion planning of unknown underactuated stochastic systems,” inInternational Conference on Robotics and Automation (ICRA), 2023
work page 2023
-
[23]
Robust MPC of Constrained Nonlinear Systems Based on Interval Arithmetic,
D. Limon, J. Bravo, T. Alamo, and E. Camacho, “Robust MPC of Constrained Nonlinear Systems Based on Interval Arithmetic,”IEEE Proceedings on Control Theory and Applications, vol. 152, no. 3, 2005
work page 2005
-
[24]
Fast System Level Synthesis: Robust Model Predictive Control using Riccati Recursions,
A. P. Leeman, J. Kohler, F. Messerer, A. Lahr, M. Diehl, and M. N. Zeilinger, “Fast System Level Synthesis: Robust Model Predictive Control using Riccati Recursions,”IFAC Conference on NMPC, 2024
work page 2024
-
[25]
Constraint Learning in Multi- Agent Dynamic Games from Demonstrations of Local Nash Interac- tions,
Z. Zhang, C.-Y . Chiu, and G. Chou, “Constraint Learning in Multi- Agent Dynamic Games from Demonstrations of Local Nash Interac- tions,”arXiv:2508.19945, 2025. APPENDIX A. Proof of Proposition 2 We begin by writing each component ofd i t defined in (8), denoted{di t,k :k∈[n]}below, as: di t,k :=r i t,k(xi t,ui t,zi t,vi t) +Ei t,k(xi t)wi t =r i t,k(xi t...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.