DustNet: A Wireless Network of Ultrasonic Neural Implants
Pith reviewed 2026-05-17 21:31 UTC · model grok-4.3
The pith
A network of ultrasonically powered implants enables wireless multi-site neural recording over a single link.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
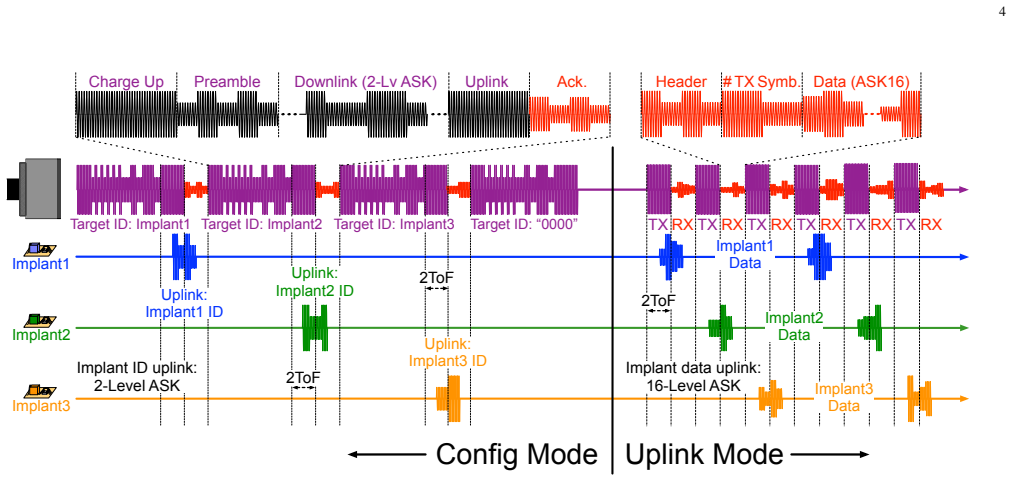
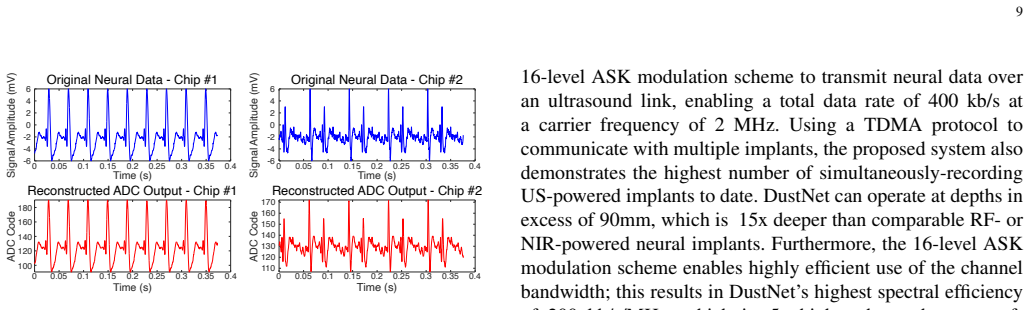
DustNet implements a time-division multiple-access (TDMA) protocol with up to 16-level amplitude modulation of the ultrasound backscatter that achieves up to 4x higher data rates than traditional on-off keying methods, supporting up to 8 simultaneously recording nodes over a single ultrasound link with measured total data rate up to 400 kb/s at 90 mm depth.
What carries the argument
TDMA protocol with 16-level amplitude modulation of the ultrasound backscatter for multi-node communication.
If this is right
- Supports reconstruction of motor intention from distributed peripheral nerve recordings.
- Avoids percutaneous wires that are prone to infection and degradation.
- Enables chronic use of neural recording systems for prosthetics.
- Achieves 200 kb/s per implant at 50 kb/s uplink with 7 μW dissipation.
- System functions at 90 mm depth with 2 MHz ultrasound carrier.
Where Pith is reading between the lines
- If the oil phantom results hold in tissue, similar networks could monitor other distributed biological signals.
- The modulation approach might allow increasing the number of nodes beyond eight by further optimizing the protocol.
- Integration with existing prosthetic systems could improve natural movement control through richer neural data.
Load-bearing premise
The performance achieved in an oil medium at 90 mm depth will hold in living tissue where sound waves face more scattering and absorption.
What would settle it
Demonstrating that in living tissue the backscatter signal strength drops too low to distinguish 16 amplitude levels at 90 mm depth would show the data rate claims do not transfer.
Figures










read the original abstract
Spatially distributed peripheral nerve recordings can be used to reconstruct motor intention and improve natural control of prosthetics However, many existing clinical solutions rely on percutaneous wires to access peripheral nerves; these sites are prone to infection and motion-induced electrode degradation, preventing chronic use. To address the need for fully wireless neural recording systems, this paper presents DustNet: a spatially-distributed network of ultrasonically-powered neural recording implants capable of supporting up to 8 simultaneously recording nodes over a single ultrasound link. To enable high throughput multi-implant communication, DustNet implements a time-division multiple-access (TDMA) protocol with up to 16-level amplitude modulation of the ultrasound backscatter that achieves up to 4x higher data rates than traditional on-off keying methods. Each neural implant consists of a 0.7x0.7x0.7 mm$^3$ piezoceramic transducer, a 100 nF off-chip capacitor, and an IC mounted on a flexible PCB. The implant IC was fabricated in a 28nm CMOS process and occupies an area of 0.43 mm$^2$. System functionality was verified at 90mm depth in oil, achieving a maximum measured data rate of 200 kb/s at 2 MHz ultrasound carrier frequency, with each implant transmitting uplink data at 50 kb/s and dissipating just 7 $\mu$W; the system is demonstrated to support up to 400 kb/s total data rate over the same link.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents DustNet, a wireless network of ultrasonically-powered neural recording implants using a TDMA protocol with up to 16-level amplitude modulation of ultrasound backscatter. This enables support for up to 8 simultaneously recording nodes over a single link. Benchtop experiments in oil at 90 mm depth report a maximum measured data rate of 200 kb/s (50 kb/s per implant) at 2 MHz carrier frequency with 7 μW power dissipation per implant; the 0.7 mm³ piezoceramic transducer, 100 nF capacitor, and 0.43 mm² 28 nm CMOS IC are described.
Significance. If the performance holds under in-vivo conditions, the approach could advance wireless distributed neural interfaces for prosthetic control by eliminating percutaneous wires. The small implant volume, low power, and use of higher-order backscatter modulation represent technical strengths over traditional OOK methods. However, the oil-phantom results leave the translation to tissue unaddressed, limiting the assessed impact.
major comments (2)
- [Abstract] Abstract: The headline claims of 4x higher data rates via 16-level modulation, 50 kb/s per implant, and support for 8 nodes at 90 mm depth rest entirely on oil-phantom measurements. Tissue attenuation (~0.5 dB/cm/MHz at 2 MHz), scattering, and FDA safety limits (MI < 1.9, TI < 1.0) would reduce received SNR and risk collapsing the distinguishable amplitude levels, directly undermining the central multi-node throughput claim. No SNR analysis, safety-margin calculation, or tissue data is provided.
- [Abstract] Abstract: No error bars, statistical details, repeatability metrics, or in-vivo results accompany the reported values (200 kb/s, 50 kb/s, 7 μW). This makes it impossible to assess whether the 16-level modulation remains reliable under realistic conditions, which is load-bearing for the performance claims.
minor comments (3)
- The abstract states both a 'maximum measured data rate of 200 kb/s' and 'up to 400 kb/s total data rate'; clarify whether 400 kb/s is measured, projected, or for a different configuration.
- Additional detail on TDMA slot timing, implant synchronization, and backscatter modulation circuit implementation would improve clarity of the protocol.
- A figure showing the received backscatter waveforms for the 16 levels or the modulation constellation would help readers evaluate the feasibility of the amplitude modulation scheme.
Simulated Author's Rebuttal
We appreciate the referee's detailed review of our manuscript on DustNet. The work focuses on a benchtop demonstration in an oil phantom to validate the ultrasonic backscatter network concept. We respond to each major comment below and outline planned revisions to strengthen the presentation of our results.
read point-by-point responses
-
Referee: [Abstract] Abstract: The headline claims of 4x higher data rates via 16-level modulation, 50 kb/s per implant, and support for 8 nodes at 90 mm depth rest entirely on oil-phantom measurements. Tissue attenuation (~0.5 dB/cm/MHz at 2 MHz), scattering, and FDA safety limits (MI < 1.9, TI < 1.0) would reduce received SNR and risk collapsing the distinguishable amplitude levels, directly undermining the central multi-node throughput claim. No SNR analysis, safety-margin calculation, or tissue data is provided.
Authors: The abstract states that functionality was verified at 90 mm depth in oil, which is a standard tissue-mimicking phantom for ultrasonic propagation studies. We agree that tissue-specific effects are important for translation. In the revision, we will incorporate an SNR analysis accounting for the mentioned attenuation and scattering, along with safety margin calculations for the mechanical and thermal indices based on our experimental acoustic outputs. This will clarify the expected performance margins without claiming in-vivo validation. revision: partial
-
Referee: [Abstract] Abstract: No error bars, statistical details, repeatability metrics, or in-vivo results accompany the reported values (200 kb/s, 50 kb/s, 7 μW). This makes it impossible to assess whether the 16-level modulation remains reliable under realistic conditions, which is load-bearing for the performance claims.
Authors: We will add error bars, repeatability metrics from multiple experimental trials, and statistical details to the abstract and results sections in the revised version. These data were collected during characterization of the system but not included initially. In-vivo results are not available as the current work is limited to benchtop validation. revision: partial
- Direct in-vivo or tissue experimental data to support the performance claims under realistic biological conditions.
Circularity Check
No circularity: experimental measurements only
full rationale
The paper reports direct experimental results from oil-phantom tests at 90 mm depth, including measured data rates (200 kb/s, 50 kb/s per node), power dissipation (7 µW), and support for 8 nodes at up to 400 kb/s total. No equations, derivations, fitted parameters, or self-citation chains are present in the abstract or described full text. All performance claims reduce to raw measurements rather than any constructed prediction or renamed input, making the work self-contained against external benchmarks with no load-bearing circular steps.
Axiom & Free-Parameter Ledger
free parameters (1)
- Maximum number of implants (8)
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
DustNet implements a time-division multiple-access (TDMA) protocol with up to 16-level amplitude modulation of the ultrasound backscatter... total data rate up to 400 kb/s at 90 mm depth.
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Each neural implant consists of a 0.7x0.7x0.7 mm³ piezoceramic transducer... 7 µW... 2 MHz carrier
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
B. Lee, M. K. Koripalli, Y . Jia, J. Acosta, M. S. E. Sendi, Y . Choi, and M. Ghovanloo, “An Implantable Peripheral Nerve Recording and Stimulation System for Experiments on Freely Moving Animal Subjects,”Scientific Reports, vol. 8, no. 1720, p. 6115, Apr. 2018, publisher: Nature Publishing Group
work page 2018
-
[2]
P. P. Vu, A. K. Vaskov, Z. T. Irwin, P. T. Henning, D. R. Lueders, A. T. Laidlaw, A. J. Davis, C. S. Nu, D. H. Gates, R. B. Gillespie, S. W. P. Kemp, T. A. Kung, C. A. Chestek, and P. S. Cederna, “A regenerative peripheral nerve interface allows real-time control of an artificial hand in upper limb amputees,”Science translational medicine, vol. 12, no. 53...
work page 2020
-
[3]
P. ˇCvanˇcara, G. Valle, M. M ¨uller, I. Bartels, T. Guiho, A. Hiairrassary, F. Petrini, S. Raspopovic, I. Strauss, G. Granata, E. Fernandez, P. M. Rossini, M. Barbaro, K. Yoshida, W. Jensen, J.-L. Divoux, D. Guiraud, S. Micera, and T. Steiglitz, “Bringing sensation to prosthetic hands—chronic assessment of implanted thin-film electrodes in humans,”Npj Fl...
work page 2023
-
[4]
Neural recording and stimulation using wireless networks of microimplants,
J. Lee, V . Leung, A.-H. Lee, J. Huang, P. Asbeck, P. P. Mercier, S. Shellhammer, L. Larson, F. Laiwalla, and A. Nurmikko, “Neural recording and stimulation using wireless networks of microimplants,” Nature Electronics, vol. 4, no. 8, pp. 604–614, 2021
work page 2021
-
[5]
G. Atzeni, J. Lim, J. Liao, A. Novello, J. Lee, E. Moon, M. Barrow, J. Letner, J. Costello, S. R. Nason, P. R. Patel, P. G. Patil, H.-S. Kim, C. A. Chestek, J. Phillips, D. Blaauw, and T. Jang, “A 260×274 µm2 572 nw neural recording micromote using near-infrared power transfer and an rf data uplink,” in2022 IEEE Symposium on VLSI Technology and Circuits (...
work page 2022
-
[6]
Z. Yu, W. Wang, J. C. Chen, Z. Chen, Y . He, A. Singer, J. T. Robinson, and K. Yang, “A wireless network of 8.8-mm3 bio- implants featuring adaptive magnetoelectric power and multi-access bidirectional telemetry,” in2022 IEEE Radio Frequency Integrated Circuits Symposium (RFIC), 2022, pp. 47–50
work page 2022
-
[7]
A sub- mm3 ultrasonic free-floating implant for multi-mote neural recording,
M. M. Ghanbari, D. K. Piech, K. Shen, S. Faraji Alamouti, C. Yalcin, B. C. Johnson, J. M. Carmena, M. M. Maharbiz, and R. Muller, “A sub- mm3 ultrasonic free-floating implant for multi-mote neural recording,” IEEE J. Solid-State Circuits, vol. 54, no. 11, pp. 3017–3030, 2019. 10
work page 2019
-
[8]
High throughput ultrasonic multi-implant readout using a machine- learning assisted CDMA receiver,
S. F. Alamouti, M. M. Ghanbari, N. T. Ersumo, and R. Muller, “High throughput ultrasonic multi-implant readout using a machine- learning assisted CDMA receiver,” in2020 42nd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), pp. 3289–3292, ISSN: 2694-0604
-
[9]
Optimizing volumetric efficiency and backscatter communication in biosensing ultrasonic implants,
M. M. Ghanbari and R. Muller, “Optimizing volumetric efficiency and backscatter communication in biosensing ultrasonic implants,”IEEE Transactions on Biomedical Circuits and Systems, vol. 14, no. 6, pp. 1381–1392, 2020
work page 2020
-
[10]
Past, present and future of spike sorting techniques,
H. G. Rey, C. Pedreira, and R. Q. Quiroga, “Past, present and future of spike sorting techniques,”Brain research bulletin, vol. 119, pp. 106–117, 2015
work page 2015
-
[11]
C. Lee, J. Pinkenburg, M. M. Ghanbari, C. Yalcin, M. Montalban, and R. Muller, “35.8 dustnet: A network of time-division multiplexed ultrasonic implants with 16-level ask backscatter modulation,” in2025 IEEE International Solid-State Circuits Conference (ISSCC), vol. 68, 2025, pp. 582–584
work page 2025
-
[12]
T. C. Chang, M. L. Wang, J. Charthad, M. J. Weber, and A. Arbabian, “27.7 a 30.5 mm 3 fully packaged implantable device with duplex ultrasonic data and power links achieving 95kb/s with¡ 10- 4 ber at 8.5 cm depth,” in2017 IEEE International Solid-State Circuits Conference (ISSCC). IEEE, 2017, pp. 460–461
work page 2017
-
[13]
Wireless recording in the peripheral nervous system with ultrasonic neural dust,
D. Seo, R. M. Neely, K. Shen, U. Singhal, E. Alon, J. M. Rabaey, J. M. Carmena, and M. M. Maharbiz, “Wireless recording in the peripheral nervous system with ultrasonic neural dust,”Neuron, vol. 91, no. 3, pp. 529–539, 2016
work page 2016
-
[14]
Multi-access networking with wireless ultrasound-powered implants,
T. C. Chang, M. Wang, and A. Arbabian, “Multi-access networking with wireless ultrasound-powered implants,” in2019 IEEE Biomedical Circuits and Systems Conference (BioCAS). IEEE, 2019, pp. 1–4
work page 2019
-
[15]
Ultrasonic thermal dust: A method to monitor deep tissue temperature profiles,
B. A. Ozilgen and M. M. Maharbiz, “Ultrasonic thermal dust: A method to monitor deep tissue temperature profiles,” in2017 39th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC). IEEE, 2017, pp. 865–868
work page 2017
-
[16]
A wireless, multicolor fluorescence image sensor implant for real-time monitoring in cancer therapy,
M. Roschelle, R. Rabbani, S. Gweon, R. Kumar, A. Vercruysse, N. Woo Cho, M. H. Spitzer, A. M. Niknejad, V . M. Stojanovi ´c, and M. Anwar, “A wireless, multicolor fluorescence image sensor implant for real-time monitoring in cancer therapy,”IEEE Journal of Solid-State Circuits, vol. 59, no. 11, pp. 3580–3598, 2024
work page 2024
-
[17]
34.4 a 4.5 mm 3 deep-tissue ultrasonic implantable luminescence oxygen sensor,
S. Sonmezoglu and M. M. Maharbiz, “34.4 a 4.5 mm 3 deep-tissue ultrasonic implantable luminescence oxygen sensor,” in2020 IEEE International Solid-State Circuits Conference-(ISSCC). IEEE, 2020, pp. 454–456
work page 2020
-
[18]
An rc oscillator with comparator offset cancellation,
A. Paidimarri, D. Griffith, A. Wang, G. Burra, and A. P. Chandrakasan, “An rc oscillator with comparator offset cancellation,”IEEE Journal of Solid-State Circuits, vol. 51, no. 8, pp. 1866–1877, 2016
work page 2016
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.