Towards Patient-Specific Deformable Registration in Laparoscopic Surgery
Pith reviewed 2026-05-10 15:02 UTC · model grok-4.3
The pith
A patient-specific method registers preoperative 3D models to intraoperative laparoscopic surfaces using Transformers and physics.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
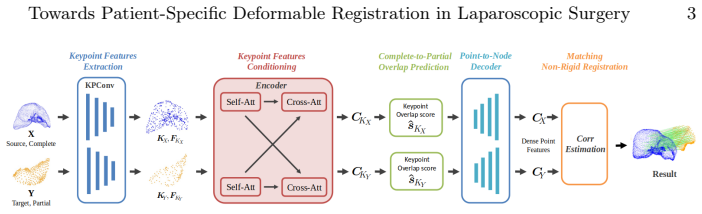
We introduce the first patient-specific non-rigid point cloud registration method that leverages a novel data generation strategy to optimize outcomes for individual patients. The approach combines a Transformer encoder-decoder architecture with overlap estimation and a matching module to predict dense correspondences, followed by a physics-based algorithm for registration. On synthetic data it achieves 45% Matching Score with 92% Inlier Ratio, significantly outperforming traditional agnostic approaches on both synthetic and real data.
What carries the argument
The patient-specific non-rigid point cloud registration pipeline consisting of a Transformer for correspondence prediction and a subsequent physics-based registration step, enabled by patient-tailored data generation.
Load-bearing premise
The novel data generation strategy must produce training data that closely matches the deformations, noise, and mismatches encountered in real surgeries for the model to generalize effectively.
What would settle it
Measuring the inlier ratio and matching score on a dataset of real patient intraoperative point clouds; if the patient-specific method does not outperform standard methods, the claim would be undermined.
Figures



read the original abstract
Unsafe surgical care is a critical health concern, often linked to limitations in surgeon experience, skills, and situational awareness. Integrating patient-specific 3D models into the surgical field can enhance visualization, provide real-time anatomical guidance, and reduce intraoperative complications. However, reliably registering these models in general surgery remains challenging due to mismatches between preoperative and intraoperative organ surfaces, such as deformations and noise. To overcome these challenges, we introduce the first patient-specific non-rigid point cloud registration method, which leverages a novel data generation strategy to optimize outcomes for individual patients. Our approach combines a Transformer encoder-decoder architecture with overlap estimation and a dedicated matching module to predict dense correspondences, followed by a physics-based algorithm for registration. Experimental results on both synthetic and real data demonstrate that our patient-specific method significantly outperforms traditional agnostic approaches, achieving 45% Matching Score with 92% Inlier Ratio on synthetic data, highlighting its potential to improve surgical care.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes the first patient-specific non-rigid point cloud registration pipeline for laparoscopic surgery. It introduces a novel per-patient data generation strategy to create training data from preoperative models, then uses a Transformer encoder-decoder with overlap estimation and a dedicated matching module to predict dense correspondences, followed by a physics-based registration algorithm. The central claim is that this approach significantly outperforms traditional agnostic registration methods on both synthetic and real data, with reported figures of 45% Matching Score and 92% Inlier Ratio on synthetic data.
Significance. If the central claims hold after additional validation, the work could meaningfully advance intraoperative visualization by enabling reliable alignment of patient-specific 3D models despite deformations and noise. The explicit integration of a Transformer-based correspondence predictor with a subsequent physics-based step, together with the per-patient data generation strategy, is a constructive combination of learning and classical methods that addresses a practical surgical need. The provision of both quantitative synthetic metrics and qualitative real-data demonstrations is noted as a positive step.
major comments (2)
- [Abstract] Abstract: the claim that the method 'significantly outperforms traditional agnostic approaches' on real data is not accompanied by any quantitative metrics, baseline details, error bars, or statistical tests, while synthetic results are given specific numbers (45% Matching Score, 92% Inlier Ratio). This absence is load-bearing for the central claim of clinical superiority and generalization.
- [Method / Data Generation] The novel data generation strategy is presented as the key enabler of patient-specific performance, yet no quantitative validation is reported comparing the statistics of simulated deformations, noise, and surface mismatches against measured intraoperative data. Without such a check, the assumption that the generated training distribution supports generalization to real laparoscopic conditions remains unverified and directly affects the patient-specific advantage.
minor comments (1)
- [Abstract] The abstract would be clearer if it stated the number of real laparoscopic cases evaluated and listed the specific agnostic baselines used for comparison.
Simulated Author's Rebuttal
We thank the referee for the constructive comments that highlight important aspects of clarity and validation. We address each major comment below with honest responses and indicate where revisions will be made to the manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that the method 'significantly outperforms traditional agnostic approaches' on real data is not accompanied by any quantitative metrics, baseline details, error bars, or statistical tests, while synthetic results are given specific numbers (45% Matching Score, 92% Inlier Ratio). This absence is load-bearing for the central claim of clinical superiority and generalization.
Authors: We agree that the abstract phrasing implies quantitative superiority on real data that is not supported by the reported results. Quantitative metrics (45% Matching Score, 92% Inlier Ratio) are provided only for synthetic data where ground-truth correspondences exist. Real-data evaluation consists of qualitative visual comparisons because intraoperative ground truth is unavailable. We will revise the abstract to state that the method achieves the reported quantitative improvements on synthetic data and shows promising qualitative alignment on real laparoscopic data, thereby aligning the claim with the manuscript content. revision: yes
-
Referee: [Method / Data Generation] The novel data generation strategy is presented as the key enabler of patient-specific performance, yet no quantitative validation is reported comparing the statistics of simulated deformations, noise, and surface mismatches against measured intraoperative data. Without such a check, the assumption that the generated training distribution supports generalization to real laparoscopic conditions remains unverified and directly affects the patient-specific advantage.
Authors: The data generation procedure uses preoperative patient models combined with deformation and noise models drawn from published biomechanical studies of laparoscopic organ behavior. We did not perform a direct quantitative statistical comparison of the simulated distributions against intraoperative measurements, as this would require paired pre- and intra-operative datasets with accurate deformation ground truth that were not accessible for this study. In the revised manuscript we will expand the methods and discussion sections to detail the modeling assumptions and explicitly acknowledge the absence of such validation as a limitation. revision: partial
- Quantitative statistical validation of the simulated deformation, noise, and surface mismatch distributions against real intraoperative measurements, which cannot be performed without new clinical data collection.
Circularity Check
No significant circularity in derivation chain
full rationale
The paper presents an empirical pipeline (Transformer encoder-decoder plus overlap estimation, matching module, and physics-based registration) trained on a novel per-patient data generation strategy. No equations, derivations, or first-principles results are described in the abstract or claimed structure that reduce performance metrics (e.g., Matching Score or Inlier Ratio) to quantities defined by the method itself. Results are reported as experimental outcomes on synthetic data, with no self-definitional loops, fitted inputs presented as predictions, or load-bearing self-citations that collapse the central claim to tautology. The approach uses standard components augmented by a data-generation step whose fidelity is an external assumption, not a circular reduction.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Bernhardt, S., Nicolau, S.A., Soler, L., Doignon, C.: The status of augmented reality in laparoscopic surgery as of 2016. Medical Image Analysis37, 66–90 (2017), https://www.sciencedirect.com/science/article/pii/S1361841517300178
work page 2016
-
[2]
International Journal of Computer Assisted Radiology and Surgery 18(8), 1521–1531 (2023)
Guan, P., Luo, H., Guo, J., Zhang, Y., Jia, F.: Intraoperative laparoscopic liver surface registration with preoperative ct using mixing features and overlapping region masks. International Journal of Computer Assisted Radiology and Surgery 18(8), 1521–1531 (2023)
work page 2023
-
[3]
In: Proceedings of the IEEE/CVF international conference on computer vision
Li, J., Lee, G.H.: Usip: Unsupervised stable interest point detection from 3d point clouds. In: Proceedings of the IEEE/CVF international conference on computer vision. pp. 361–370 (2019)
work page 2019
-
[4]
In: Proceedings of the IEEE/CVF conference on computer vision and pattern recognition
Li, Y., Harada, T.: Lepard: Learning partial point cloud matching in rigid and de- formable scenes. In: Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. pp. 5554–5564 (2022)
work page 2022
-
[5]
Lin, T.Y., Goyal, P., Girshick, R., He, K., Dollár, P.: Focal loss for dense object detection.In:ProceedingsoftheIEEEinternationalconferenceoncomputervision. pp. 2980–2988 (2017)
work page 2017
-
[6]
International journal of computer assisted radiology and surgery14, 1237–1245 (2019)
Modrzejewski, R., Collins, T., Seeliger, B., Bartoli, A., Hostettler, A., Marescaux, J.: An in vivo porcine dataset and evaluation methodology to measure soft-body laparoscopic liver registration accuracy with an extended algorithm that handles collisions. International journal of computer assisted radiology and surgery14, 1237–1245 (2019)
work page 2019
-
[7]
In: 2009 IEEE international conference on robotics and automation
Rusu, R.B., Blodow, N., Beetz, M.: Fast point feature histograms (fpfh) for 3d registration. In: 2009 IEEE international conference on robotics and automation. pp. 3212–3217. IEEE (2009)
work page 2009
-
[8]
Safety,W.P.,Organization,W.H.,etal.:WHOguidelinesforsafesurgery2009:safe surgery saves lives. No. WHO/IER/PSP/2008.08-1E, World Health Organization (2009)
work page 2008
-
[9]
Soler, L., Hostettler, A., Agnus, V., Charnoz, A., Fasquel, J.B., Moreau, J., Oss- wald, A.B., Bouhadjar, M., Marescaux, J.: 3d image reconstruction for comparison of algorithm database (2010)
work page 2010
-
[10]
In: Symposium on Geometry processing
Sorkine, O., Alexa, M.: As-rigid-as-possible surface modeling. In: Symposium on Geometry processing. vol. 4, pp. 109–116. Citeseer (2007)
work page 2007
-
[11]
Talbot, H., Haouchine, N., Peterlik, I., Dequidt, J., Duriez, C., Delingette, H., Cotin, S.: Surgery Training, Planning and Guidance Using the SOFA Framework. In: Hege, H.C., Ropinski, T. (eds.) Eurographics 2015 - Dirk Bartz Prize. The Eurographics Association (2015). https://doi.org/10.2312/egm.20151028
-
[12]
In: Proceedings of the IEEE/CVF international conference on computer vision
Thomas, H., Qi, C.R., Deschaud, J.E., Marcotegui, B., Goulette, F., Guibas, L.J.: Kpconv: Flexible and deformable convolution for point clouds. In: Proceedings of the IEEE/CVF international conference on computer vision. pp. 6411–6420 (2019)
work page 2019
-
[13]
Visser, A., Geboers, B., Gouma, D.J., Goslings, J.C., Ubbink, D.T.: Predictors of surgical complications: A systematic review. Surgery158(1), 58–65 (2015). https://doi.org/https://doi.org/10.1016/j.surg.2015.01.012 10 Alberto Neri, Veronica Penza, Nazim Haouchine, and Leonardo S. Mattos
-
[14]
International journal of computer assisted radiology and surgery18(6), 1025–1032 (2023)
Yang, Z., Simon, R., Linte, C.A.: Learning feature descriptors for pre-and intra- operative point cloud matching for laparoscopic liver registration. International journal of computer assisted radiology and surgery18(6), 1025–1032 (2023)
work page 2023
-
[15]
In: Proceedings of the IEEE/CVF conference on computer vision and pattern recognition
Yew, Z.J., Lee, G.H.: Regtr: End-to-end point cloud correspondences with trans- formers. In: Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. pp. 6677–6686 (2022)
work page 2022
-
[16]
Advances in Neural Information Processing Systems34, 23872–23884 (2021)
Yu, H., Li, F., Saleh, M., Busam, B., Ilic, S.: Cofinet: Reliable coarse-to-fine cor- respondences for robust pointcloud registration. Advances in Neural Information Processing Systems34, 23872–23884 (2021)
work page 2021
-
[17]
In: International conference on medical image computing and computer-assisted intervention
Zha, R., Cheng, X., Li, H., Harandi, M., Ge, Z.: Endosurf: Neural surface re- construction of deformable tissues with stereo endoscope videos. In: International conference on medical image computing and computer-assisted intervention. pp. 13–23. Springer (2023)
work page 2023
-
[18]
Zhang, Y., Zou, Y., Liu, P.X.: Point cloud registration in laparoscopic liver surgery usingkeypointcorrespondenceregistrationnetwork.IEEETransactionsonMedical Imaging (2024)
work page 2024
-
[19]
Information Fusion107, 102305 (2024)
Zhao, Y., Zhang, J., Xu, S., Ma, J.: Deep learning-based low overlap point cloud registration for complex scenario: The review. Information Fusion107, 102305 (2024)
work page 2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.