Modal Decomposition and Identification for a Population of Structures Using Physics-Informed Graph Neural Networks and Transformers
Pith reviewed 2026-05-22 17:05 UTC · model grok-4.3
The pith
Physics-informed transformers and graph networks decompose structural vibrations into modes and recover their properties without any labeled data.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
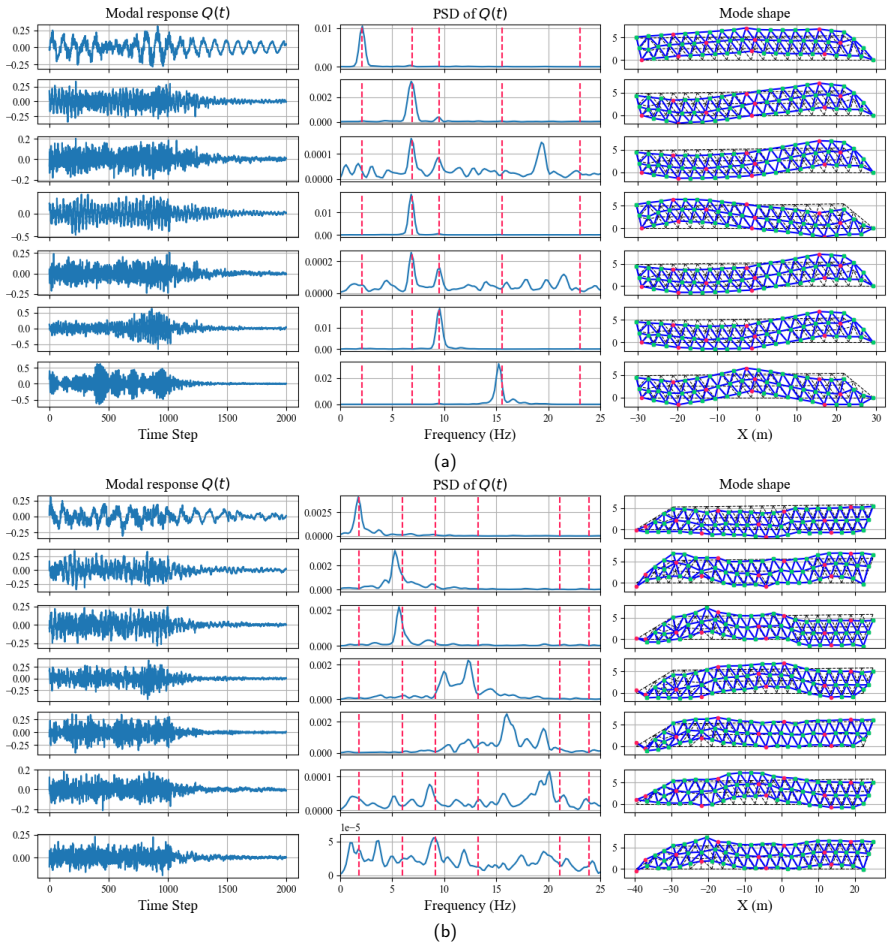
By embedding modal decomposition theory into the loss function of a transformer-GNN architecture, the model separates measured dynamic responses into single-degree-of-freedom modal components and simultaneously identifies the associated natural frequencies, damping ratios, and mode shapes for an entire population of structures, all in a purely unsupervised manner that does not rely on labeled data or explicit mode-shape supervision.
What carries the argument
A physics-informed loss function that enforces the independence and orthogonality of structural modes to supervise the transformer decomposition, combined with a graph neural network that uses structural connectivity to predict the corresponding mode-shape vectors.
If this is right
- Modal properties can be extracted from sparse measurements without collecting or using any supervised training labels.
- The same model continues to work when the underlying structure changes configuration or experiences different external loads.
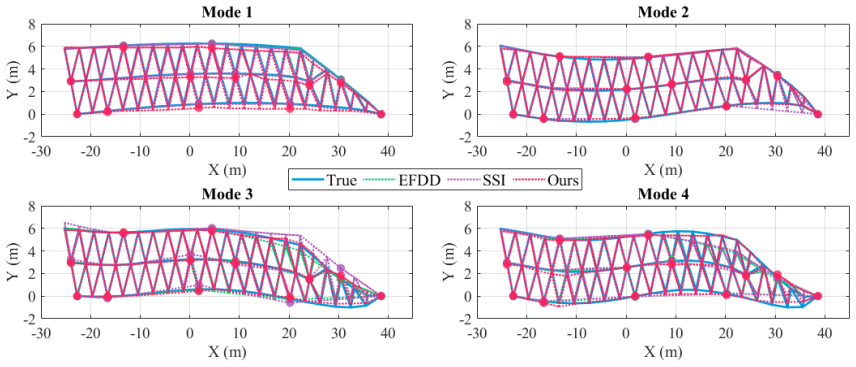
- Comparative tests show higher accuracy than established modal identification methods on the reported simulation and experiment cases.
- Population-level monitoring becomes feasible because the framework does not need to be retrained from scratch for each new but similar structure.
Where Pith is reading between the lines
- The method could be paired with streaming sensor data to update modal estimates continuously as a structure ages or is modified.
- Extending the same independence constraint to nonlinear or time-varying systems might allow modal tracking under changing environmental conditions.
- Because training requires only the physics loss, the framework might be deployed on fleets of structures with minimal additional data collection effort.
Load-bearing premise
Structural vibration modes remain sufficiently independent across different configurations that a decomposition loss alone can reliably train the network without labeled examples or direct mode-shape targets.
What would settle it
If the frequencies and damping ratios recovered by the model on laboratory test data deviate by more than a few percent from the values obtained by conventional modal analysis on the identical datasets, the unsupervised physics supervision would be shown to be insufficient.
Figures













read the original abstract
Modal identification is crucial for structural health monitoring and structural control, providing critical insights into structural dynamics and performance. This study presents a novel deep learning framework that integrates graph neural networks (GNNs), transformers, and a physics-informed loss function to achieve modal decomposition and identification across a population of structures. The transformer module decomposes multi-degrees-of-freedom (MDOF) structural dynamic measurements into single-degree-of-freedom (SDOF) modal responses, facilitating the identification of natural frequencies and damping ratios. Concurrently, the GNN captures the structural configurations and identifies mode shapes corresponding to the decomposed SDOF modal responses. The proposed model is trained in a purely physics-informed and unsupervised manner, leveraging modal decomposition theory and the independence of structural modes to guide learning without the need for labeled data. Validation through numerical simulations and laboratory experiments demonstrates its effectiveness in accurately decomposing dynamic responses and identifying modal properties from sparse structural dynamic measurements, regardless of variations in external loads or structural configurations. Comparative analyses against established modal identification techniques and model variations further underscore its superior performance, positioning it as a favorable approach for population-based structural health monitoring.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a framework that combines a transformer to decompose MDOF structural dynamic responses into SDOF modal components (for identifying natural frequencies and damping ratios) with a GNN to recover corresponding mode shapes from structural graph representations. The model is trained in a purely unsupervised, physics-informed manner by embedding modal decomposition theory, mode independence, and orthogonality into the loss function, without requiring labeled data. Effectiveness is claimed via numerical simulations and laboratory experiments on varying loads and structural configurations, with comparisons to established modal identification methods.
Significance. If the unsupervised physics-informed supervision proves robust and unique, the work would be significant for scalable, population-based structural health monitoring, as it addresses the scarcity of labeled modal data and enables identification from sparse measurements across diverse structures. The integration of GNNs for configuration-aware mode shape recovery with transformer-based decomposition is a novel direction that could reduce reliance on traditional experimental modal analysis techniques.
major comments (3)
- [Abstract] Abstract: The central claim that the model achieves modal decomposition 'in a purely physics-informed and unsupervised manner' by leveraging 'modal decomposition theory and the independence of structural modes' to guide learning is load-bearing, but the loss function's ability to uniquely enforce correct decompositions (rather than other minima satisfying the same constraints) is not demonstrated, particularly under sparse sensors and varying configurations.
- [Validation] Validation through numerical simulations and laboratory experiments: While comparisons to established techniques are mentioned, the absence of detailed quantitative metrics, error bars, data exclusion criteria, or ablation studies on loss terms leaves the support for superior performance and robustness across structural variations limited and hard to verify.
- [Methods] Methods (physics-informed loss): The assumption that embedding modal independence and SDOF response characteristics into the loss reliably supervises the transformer and GNN without labeled data or explicit mode shape supervision risks circularity, as the loss may primarily reinforce the same modal assumptions the model is intended to discover rather than providing external grounding.
minor comments (2)
- [Abstract] The abstract could more explicitly state the form of the physics-informed loss terms (e.g., orthogonality penalties or SDOF oscillator residuals) to improve immediate clarity for readers.
- [Introduction] Notation for MDOF/SDOF responses and graph representations in the GNN could be standardized earlier in the manuscript to aid readability.
Simulated Author's Rebuttal
We sincerely thank the referee for their constructive and detailed feedback on our manuscript. We have carefully reviewed each major comment and provide point-by-point responses below, outlining planned revisions where appropriate to strengthen the presentation and validation of our physics-informed framework.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim that the model achieves modal decomposition 'in a purely physics-informed and unsupervised manner' by leveraging 'modal decomposition theory and the independence of structural modes' to guide learning is load-bearing, but the loss function's ability to uniquely enforce correct decompositions (rather than other minima satisfying the same constraints) is not demonstrated, particularly under sparse sensors and varying configurations.
Authors: We acknowledge the referee's valid concern that theoretical uniqueness of the minima is not formally proven. The loss function is constructed from established modal theory (orthogonality, independence, and SDOF characteristics), and the transformer-GNN architecture further constrains solutions through graph-based mode shape recovery. Empirical results across multiple configurations and sensor densities consistently recover physically consistent modes matching reference methods. In the revision we will add a dedicated discussion subsection with sensitivity analyses to random initializations and comparisons against relaxed loss variants to better illustrate convergence behavior under sparsity. revision: partial
-
Referee: [Validation] Validation through numerical simulations and laboratory experiments: While comparisons to established techniques are mentioned, the absence of detailed quantitative metrics, error bars, data exclusion criteria, or ablation studies on loss terms leaves the support for superior performance and robustness across structural variations limited and hard to verify.
Authors: We agree that the current validation section would benefit from greater quantitative rigor. The revised manuscript will include comprehensive tables reporting mean absolute errors with standard deviations across repeated trials, explicit statements of data exclusion criteria, and ablation experiments that systematically remove or weight individual loss terms to quantify their impact on accuracy and robustness across varying loads and configurations. revision: yes
-
Referee: [Methods] Methods (physics-informed loss): The assumption that embedding modal independence and SDOF response characteristics into the loss reliably supervises the transformer and GNN without labeled data or explicit mode shape supervision risks circularity, as the loss may primarily reinforce the same modal assumptions the model is intended to discover rather than providing external grounding.
Authors: The loss terms are derived directly from classical modal analysis principles (mode orthogonality via inner products and SDOF free-vibration equations) that predate and exist independently of the neural architecture. These constraints supply external physical supervision rather than presupposing the decomposition the model must learn. We will expand the methods section with a clearer step-by-step derivation of each loss component and an explicit statement that no labeled modal data or mode-shape targets are used, thereby clarifying the non-circular nature of the supervision. revision: partial
Circularity Check
No significant circularity: physics loss uses external modal theory
full rationale
The paper embeds standard modal decomposition theory (mode independence, SDOF responses per mode, orthogonality) into the unsupervised loss to train the GNN-transformer model on sparse measurements. This theory is drawn from established structural dynamics, not from the paper's own fitted outputs, self-citations, or ansatzes. The decomposition and identification emerge as model outputs consistent with the external physics constraints rather than being presupposed by definition or by renaming known results. No load-bearing self-citation chain or fitted-input-called-prediction pattern is present; validation on numerical and experimental cases further confirms the derivation remains self-contained against independent benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Structural modes are independent and can be decomposed from multi-degree-of-freedom responses using modal theory.
Reference graph
Works this paper leans on
-
[1]
C. R. Farrar, K. Worden, An introduction to structural health monitoring, Philosophical Transactions of the Royal Society A: Mathematical, Physical and Engineering Sciences 365 (2007) 303–315
work page 2007
-
[2]
B. F. Spencer, S. Nagarajaiah, State of the art of structural control, Journal of Structural Engineering 129 (2003) 845–856
work page 2003
-
[3]
Z. Ibrahim, H. Adeli, K. Ghaedi, A. Javanmardi, Invited review: Recent developments in vibration control of building and bridge structures, Journal of Vibroengineering 19 (2017) 3564–3580
work page 2017
- [4]
-
[5]
Z. Lai, W. Liu, X. Jian, K. Bacsa, L. Sun, E. Chatzi, Neural modal ordinary differential equations: Integrating physics-based modeling with neural ordinary differential equations for modeling high-dimensional monitored structures, Data-Centric Engineering 3 (2022) e34
work page 2022
-
[6]
S. W. Doebling, C. R. Farrar, M. B. Prime, D. W. Shevitz, Damage identification and health monitoring of structural and mechanical systems from changes in their vibration characteristics: A literature review, Technical Report, Los Alamos National Lab. (LANL), Los Alamos, NM (United States), 1996. URL:https://www.osti.gov/biblio/249299. doi:10.2172/249299
-
[7]
S. Nagarajaiah, B. Basu, Output only modal identification and structural damage detection using time frequency & wavelet techniques, Earthquake Engineering and Engineering Vibration 8 (2009) 583–605
work page 2009
-
[8]
Y. An, E. Chatzi, S.-H. Sim, S. Laflamme, B. Blachowski, J. Ou, Recent progress and future trends on damage identification methods for bridge structures, Structural Control and Health Monitoring 26 (2019) e2416
work page 2019
- [9]
-
[10]
F. Braghin, S. Cinquemani, F. Resta, A new approach to the synthesis of modal control laws in active structural vibration control, Journal of Vibration and Control 19 (2013) 163–182
work page 2013
-
[11]
L. Sun, D. Hong, L. Chen, Cables interconnected with tuned inerter damper for vibration mitigation, Engineering Structures 151 (2017) 57–67
work page 2017
-
[12]
Avitabile, Experimental modal analysis, Sound and vibration 35 (2001) 20–31
P. Avitabile, Experimental modal analysis, Sound and vibration 35 (2001) 20–31
work page 2001
-
[13]
F. B. Zahid, Z. C. Ong, S. Y. Khoo, A review of operational modal analysis techniques for in-service modal identification, Journal of the Brazilian Society of Mechanical Sciences and Engineering 42 (2020) 398
work page 2020
-
[14]
R. Brincker, L. Zhang, P. Andersen, Modal identification from ambient responses using frequency domain decomposition, in: IMAC 18: Proceedings of the International Modal Analysis Conference (IMAC), San Antonio, Texas, USA, February 7-10, 2000, 2000, pp. 625–630
work page 2000
-
[15]
B. Peeters, G. De Roeck, Reference-based stochastic subspace identification for output-only modal analysis, Mechanical systems and signal processing 13 (1999) 855–878. X. Jian et al.:Preprint submitted to Elsevier Page 20 of 21
work page 1999
-
[16]
Y. Yang, S. Nagarajaiah, Time-frequency blind source separation using independent component analysis for output-only modal identification of highly damped structures, Journal of Structural Engineering 139 (2013) 1780–1793
work page 2013
-
[17]
A. Bagheri, O. E. Ozbulut, D. K. Harris, Structural system identification based on variational mode decomposition, Journal of Sound and Vibration 417 (2018) 182–197
work page 2018
-
[18]
J. Antoni, Blind separation of vibration components: Principles and demonstrations, Mechanical systems and signal processing 19 (2005) 1166–1180
work page 2005
- [19]
-
[20]
D.Liu,Z.Tang,Y.Bao,H.Li, Machine-learning-basedmethodsforoutput-onlystructuralmodalidentification, StructuralControlandHealth Monitoring 28 (2021) e2843
work page 2021
-
[21]
Y. Bao, D. Liu, H. Li, A mechanics-informed neural network method for structural modal identification, Mechanical Systems and Signal Processing 216 (2024) 111458
work page 2024
-
[22]
J. Shu, C. Zhang, Y. Gao, Y. Niu, A multi-task learning-based automatic blind identification procedure for operational modal analysis, Mechanical Systems and Signal Processing 187 (2023) 109959
work page 2023
-
[23]
I. A. Hernández-González, E. García-Macías, G. Costante, F. Ubertini, Ai-driven blind source separation for fast operational modal analysis of structures, Mechanical Systems and Signal Processing 211 (2024) 111267
work page 2024
- [24]
-
[25]
J. Gosliga, P. Gardner, L. Bull, N. Dervilis, K. Worden, Foundations of population-based shm, part ii: Heterogeneous populations–graphs, networks, and communities, Mechanical systems and signal processing 148 (2021) 107144
work page 2021
-
[26]
G. Tsialiamanis, C. Mylonas, E. Chatzi, N. Dervilis, D. J. Wagg, K. Worden, Foundations of population-based shm, part iv: The geometry of spaces of structures and their feature spaces, Mechanical Systems and Signal Processing 157 (2021) 107692
work page 2021
-
[27]
G. Tsialiamanis, N. Dervilis, D. J. Wagg, K. Worden, Towards a population-informed approach to the definition of data-driven models for structural dynamics, Mechanical Systems and Signal Processing 200 (2023) 110581
work page 2023
- [28]
-
[29]
S. Ibrahim, Random decrement technique for modal identification of structures, Journal of Spacecraft and Rockets 14 (1977) 696–700
work page 1977
- [30]
-
[31]
W.Hamilton,Z.Ying, J.Leskovec, Inductiverepresentation learningonlargegraphs, Advances inneuralinformationprocessingsystems30 (2017)
work page 2017
-
[32]
A. Vaswani, N. Shazeer, N. Parmar, J. Uszkoreit, L. Jones, A. N. Gomez, Ł. Kaiser, I. Polosukhin, Attention is all you need, Advances in neural information processing systems 30 (2017)
work page 2017
-
[33]
J. Lee, Y. Lee, J. Kim, A. Kosiorek, S. Choi, Y. W. Teh, Set transformer: A framework for attention-based permutation-invariant neural networks, in: International conference on machine learning, PMLR, 2019, pp. 3744–3753
work page 2019
-
[34]
L.A.Bull,P.A.Gardner,J.Gosliga,T.J.Rogers,N.Dervilis,E.J.Cross,E.Papatheou,A.Maguire,C.Campos,K.Worden, Foundationsof population-based shm, part i: Homogeneous populations and forms, Mechanical systems and signal processing 148 (2021) 107141
work page 2021
- [35]
-
[36]
M.P.Limongelli,C.Gentile,F.Biondini,M.diPrisco,F.Ballio,G.Zonno,P.Borlenghi,S.Bianchi,L.Capacci,M.Anghileri,etal., Bridge structural monitoring: The lombardia regional guidelines, Structure and Infrastructure Engineering 20 (2024) 461–484
work page 2024
-
[37]
P.-O. Persson, G. Strang, A simple mesh generator in matlab, SIAM review 46 (2004) 329–345
work page 2004
-
[38]
PyTorch: An Imperative Style, High-Performance Deep Learning Library
A. Paszke, Pytorch: An imperative style, high-performance deep learning library, arXiv preprint arXiv:1912.01703 (2019)
work page internal anchor Pith review Pith/arXiv arXiv 1912
-
[39]
M.Wang,D.Zheng,Z.Ye,Q.Gan,M.Li,X.Song,J.Zhou,C.Ma,L.Yu,Y.Gai,etal.,Deepgraphlibrary:Agraph-centric,highly-performant package for graph neural networks, arXiv preprint arXiv:1909.01315 (2019)
work page internal anchor Pith review arXiv 1909
-
[40]
D. P. Kingma, J. Ba, Adam: A method for stochastic optimization, arXiv preprint arXiv:1412.6980 (2014)
work page internal anchor Pith review Pith/arXiv arXiv 2014
-
[41]
Jian, Github repository, 2024.https://github.com/JxdEngineer/ModalGNN_Time_Domain
X. Jian, Github repository, 2024.https://github.com/JxdEngineer/ModalGNN_Time_Domain
work page 2024
-
[42]
R.Brincker,C.E.Ventura,P.Andersen, Dampingestimationbyfrequencydomaindecomposition, in:ProceedingsofIMAC19:Aconference onstructuraldynamics:Februar5-8,2001,HyattOrlando,Kissimmee,Florida,2001,SocietyforExperimentalMechanics,2001,pp.698–703
work page 2001
-
[43]
E. Cheynet, J. B. Jakobsen, J. Snæbjörnsson, Damping estimation of large wind-sensitive structures, Procedia engineering 199 (2017) 2047–2053
work page 2017
-
[44]
Y. Yu, X. Si, C. Hu, J. Zhang, A review of recurrent neural networks: Lstm cells and network architectures, Neural Computation 31 (2019) 1235–1270
work page 2019
-
[45]
Order Matters: Sequence to sequence for sets
O. Vinyals, S. Bengio, M. Kudlur, Order matters: Sequence to sequence for sets, 2016. URL:https://arxiv.org/abs/1511.06391. arXiv:1511.06391
work page internal anchor Pith review Pith/arXiv arXiv 2016
-
[46]
S. Reza, M. C. Ferreira, J. J. Machado, J. M. R. Tavares, A multi-head attention-based transformer model for traffic flow forecasting with a comparative analysis to recurrent neural networks, Expert Systems with Applications 202 (2022) 117275. X. Jian et al.:Preprint submitted to Elsevier Page 21 of 21
work page 2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.