Distributed Adaptive Estimation with ISS Guarantees for Sensor Networks with Partially Unknown Source Dynamics
Pith reviewed 2026-05-21 18:55 UTC · model grok-4.3
The pith
Each sensor node converges to an unknown source state via local adaptive observers over a directed graph, with stability and ISS robustness to noise in both continuous and discrete time.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
For both continuous-time and discrete-time cases, stability of the network coupling operators is established, all internal signals are shown to be bounded, and each node's estimate converges to the source despite model uncertainty and disturbances; input-to-state stability bounds are obtained that quantify robustness to bounded process noise through a unified Lyapunov framework linking local observer dynamics to graph topology.
What carries the argument
The unified Lyapunov framework that links local observer dynamics with graph topology to prove stability of the network coupling operators.
If this is right
- Each node's estimate converges to the source state for both continuous-time and discrete-time designs despite model uncertainty.
- Input-to-state stability bounds hold that quantify how bounded process noise affects the estimation errors.
- All internal signals remain bounded under the assumed graph conditions.
- The discrete-time design achieves the same guarantees with constant adaptive gains and per-step regressor normalization.
Where Pith is reading between the lines
- The approach may scale to networks with hundreds of nodes if the graph remains sufficiently connected for coupling stability.
- Extensions to switching or time-varying topologies could be tested by checking average stability of the coupling operators.
- Applications such as environmental monitoring or vehicle platoons could use the ISS bounds to set noise tolerance levels in advance.
Load-bearing premise
The directed graph topology must permit stability of the network coupling operators and allow enough information exchange for the unified Lyapunov framework to connect local dynamics to global convergence.
What would settle it
A simulation or experiment on a directed graph where estimates diverge or signals become unbounded under bounded noise would contradict the claimed stability and convergence.
Figures


read the original abstract
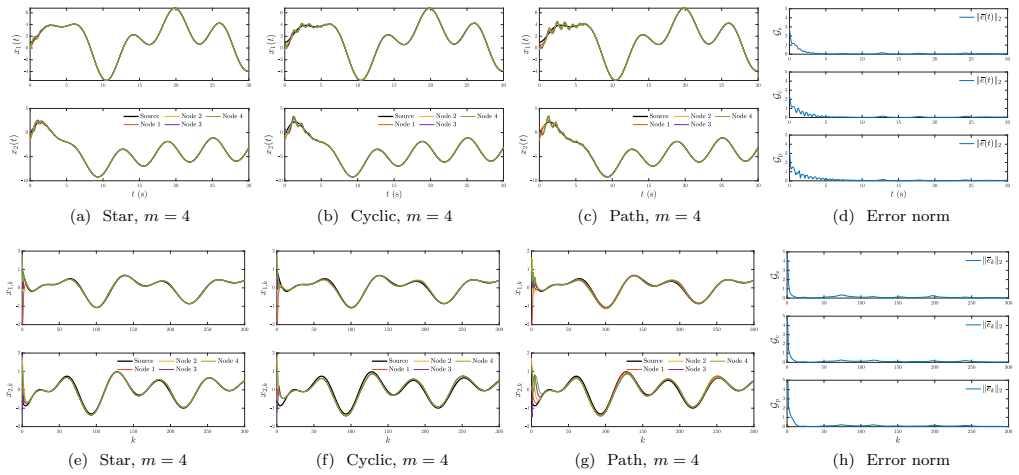
This paper studies distributed adaptive estimation over sensor networks with partially unknown source dynamics. We present parallel continuous-time and discrete-time designs in which each node runs a local adaptive observer and exchanges information over a directed graph. For both time scales, we establish stability of the network coupling operators, prove boundedness of all internal signals, and show convergence of each node's estimate to the source despite model uncertainty and disturbances. We further derive input-to-state stability (ISS) bounds that quantify robustness to bounded process noise. A key distinction is that the discrete-time design uses constant adaptive gains and per-step regressor normalization to handle sampling effects, whereas the continuous-time design does not. A unified Lyapunov framework links local observer dynamics with graph topology. Simulations on star, cyclic, and path networks corroborate the analysis, demonstrating accurate tracking, robustness, and scalability with the number of sensing nodes.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript develops parallel continuous-time and discrete-time distributed adaptive observers for sensor networks estimating a source with partially unknown dynamics. Each node runs a local adaptive observer and exchanges information over a directed graph. The central claims are stability of the network coupling operators, boundedness of all internal signals, convergence of each node's estimate to the source despite model uncertainty and disturbances, and derivation of input-to-state stability (ISS) bounds quantifying robustness to bounded process noise. A unified Lyapunov framework connects local observer dynamics to graph topology. The discrete-time design employs constant adaptive gains and per-step regressor normalization. Simulations on star, cyclic, and path networks are used to corroborate the analysis.
Significance. If the stability, convergence, and ISS results hold under the stated conditions, the work would offer a useful extension of adaptive observer techniques to networked settings with explicit robustness guarantees. The parallel continuous/discrete treatment and unified Lyapunov approach provide a coherent framework that could support further developments in distributed estimation under uncertainty.
major comments (1)
- [§§3–4] §§3–4: The stability of the network coupling operators is claimed for general directed graphs, but the analysis requires an unstated connectivity condition such as the existence of a directed spanning tree rooted at a node with source access. Without an explicit statement and proof of this minimal assumption in the theorems, the global boundedness, convergence, and ISS results do not hold for arbitrary directed graphs as implied by the abstract and the unified framework.
minor comments (2)
- [Abstract and §5] The abstract and simulation section would benefit from including specific quantitative details such as node counts, noise amplitudes, and measured estimation errors to allow readers to assess the practical tightness of the ISS bounds.
- Notation for the regressor normalization and adaptive gains in the discrete-time case should be introduced with a clear table or list of symbols to improve readability.
Simulated Author's Rebuttal
We thank the referee for the thorough review and constructive feedback. We address the major comment below and will revise the manuscript to improve clarity and rigor.
read point-by-point responses
-
Referee: [§§3–4] §§3–4: The stability of the network coupling operators is claimed for general directed graphs, but the analysis requires an unstated connectivity condition such as the existence of a directed spanning tree rooted at a node with source access. Without an explicit statement and proof of this minimal assumption in the theorems, the global boundedness, convergence, and ISS results do not hold for arbitrary directed graphs as implied by the abstract and the unified framework.
Authors: We agree that the connectivity condition is essential and was not stated with sufficient prominence. The proofs in §§3–4 rely on the existence of a directed spanning tree rooted at a node with direct source access to guarantee that the network coupling operators are Hurwitz (or Schur in discrete time) and that the Lyapunov analysis yields global boundedness and convergence. In the revised version we will introduce this as an explicit assumption (e.g., Assumption 3) immediately before the main theorems, provide a brief justification referencing standard results on directed graphs, and update the abstract and introduction to avoid any implication that the results hold for completely arbitrary directed graphs. The core technical claims remain unchanged once the assumption is stated. revision: yes
Circularity Check
No significant circularity; derivation is self-contained via standard Lyapunov and graph tools
full rationale
The paper's central claims rest on establishing stability of network coupling operators, boundedness, convergence, and ISS bounds through a unified Lyapunov framework that connects local adaptive observer dynamics to global network behavior. This construction draws on conventional control-theoretic techniques for directed graphs and adaptive estimation without any reduction of predictions to fitted parameters by construction, self-definitional loops, or load-bearing self-citations whose validity depends on the present work. The analysis remains independent of its own outputs and aligns with externally verifiable stability theorems.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The sensor network is modeled as a directed graph whose topology supports stability of the network coupling operators via information exchange.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
stability of the network coupling operators... unified Lyapunov framework links local observer dynamics with graph topology
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
augmented Laplacian L is positive stable... source-reachability assumption
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
" write newline "" initialize.prev.this.status FUNCTION begin.bib " write newline preamble empty 'skip preamble write newline if " thebibliography " longest.label * " " * write newline " [1] #1 " write newline " url@samestyle " write newline " " write newline " [2] #2 " write newline " =0pt " write newline " " ALTinterwordstretchfactor * " " * write newli...
-
[2]
, " * write output.state after.block = add.period write newline
ENTRY address author booktitle chapter doi edition editor eid howpublished institution journal key month note number organization pages publisher school series title type url volume year label extra.label sort.label short.list INTEGERS output.state before.all mid.sentence after.sentence after.block FUNCTION init.state.consts #0 'before.all := #1 'mid.sent...
-
[3]
" write newline "" before.all 'output.state := FUNCTION n.dashify 't := "" t empty not t #1 #1 substring "-" = t #1 #2 substring "--" = not "--" * t #2 global.max substring 't := t #1 #1 substring "-" = "-" * t #2 global.max substring 't := while if t #1 #1 substring * t #2 global.max substring 't := if while FUNCTION word.in bbl.in capitalize " " * FUNCT...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.