Two-dimensional FrBD friction models for rolling contact: extension to linear viscoelasticity
Pith reviewed 2026-05-16 12:47 UTC · model grok-4.3
The pith
Linear viscoelasticity extends the FrBD rolling contact framework to a system of 2(n+1) hyperbolic PDEs that capture relaxation while ensuring well-posedness and passivity.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
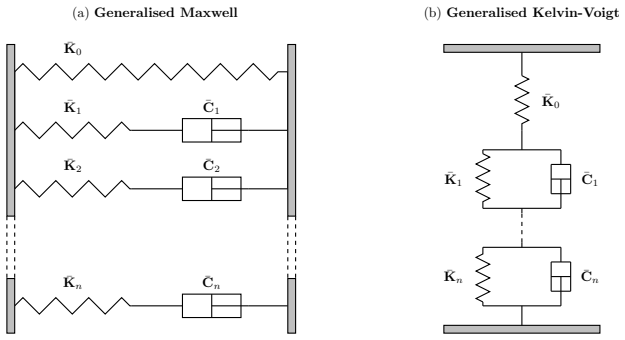
By representing the bristle with derivative Generalised Maxwell and Kelvin-Voigt models, the dynamics of the bristle, generated friction forces, and internal deformation states are described by a system of 2(n+1) hyperbolic partial differential equations, which capture complex relaxation phenomena. Three distributed formulations account for different levels of spin excitation by specifying analytical expressions for transport and rigid relative velocity. For the linear variants, well-posedness and passivity hold for any physically meaningful parametrisation.
What carries the argument
The distributed bristle element using classic derivative Generalised Maxwell and Kelvin-Voigt rheological representations, which leads to the system of hyperbolic PDEs governing the friction model.
If this is right
- Three formulations of increasing complexity handle different spin excitations in rolling contact.
- Steady-state characteristics and transient relaxation effects are illustrated through numerical experiments.
- Well-posedness and passivity are proven to hold for any physically meaningful parameters in the linear cases.
- The FrBD paradigm is advanced to enable systematic treatment of linear viscoelasticity in friction modeling.
Where Pith is reading between the lines
- This modeling could improve accuracy in simulations of viscoelastic materials under rolling, such as in tire dynamics or conveyor systems.
- Discretization of the PDE system might allow efficient numerical solvers for real-time applications.
- Similar extensions could be considered for nonlinear viscoelasticity to broaden the applicability.
Load-bearing premise
The bristle can be accurately represented by classic derivative Generalised Maxwell and Kelvin-Voigt models with specified analytical expressions for transport and rigid relative velocity.
What would settle it
An experiment or calculation showing that for some physically valid parameters the system loses well-posedness or passivity, or that simulated relaxation does not match observed viscoelastic behavior in rolling contact.
Figures









read the original abstract
This paper extends the distributed rolling contact FrBD framework to linear viscoelasticity by considering classic derivative Generalised Maxwell and Kelvin-Voigt rheological representations of the bristle element. With this modelling approach, the dynamics of the bristle, generated friction forces, and internal deformation states are described by a system of 2(n+1) hyperbolic partial differential equations (PDEs), which can capture complex relaxation phenomena originating from viscoelastic behaviours. By appropriately specifying the analytical expressions for the transport and rigid relative velocity, three distributed formulations of increasing complexity are introduced, which account for different levels of spin excitation. For the linear variants, well-posedness and passivity are analysed rigorously, showing that these properties hold for any physically meaningful parametrisation. Numerical experiments complement the theoretical results by illustrating steady-state characteristics and transient relaxation effects. The findings of this paper substantially advance the FrBD paradigm by enabling a unified and systematic treatment of linear viscoelasticity.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper extends the distributed FrBD rolling-contact framework to linear viscoelasticity by representing the bristle element with classic derivative Generalised Maxwell and Kelvin-Voigt rheological models. This yields a system of 2(n+1) hyperbolic PDEs governing bristle dynamics, friction forces, and internal states; three formulations of increasing complexity are introduced by specifying analytical transport and rigid-body velocities that incorporate different levels of spin excitation. Rigorous analysis is claimed to establish well-posedness and passivity for any physically meaningful parameter set, with numerical experiments illustrating steady-state characteristics and transient relaxation effects.
Significance. If the well-posedness and passivity results hold without hidden restrictions on the relaxation parameters, the work supplies a systematic, unified extension of the FrBD paradigm that can capture complex viscoelastic relaxation in rolling contact. This would be valuable for applications requiring accurate transient friction modeling, such as tire dynamics or robotic grasping, and the provision of explicit analytical velocity expressions plus numerical illustrations strengthens the practical utility.
major comments (2)
- [Abstract / PDE derivation] Abstract and the section deriving the hyperbolic system: the central guarantee that well-posedness and passivity hold for any physically meaningful parametrisation must be shown to survive the spin-induced transport velocities that appear as coefficients in the PDEs; the skeptic concern that these terms can produce non-hyperbolic regions or sign-indefinite dissipation for admissible relaxation times/moduli is load-bearing and requires an explicit check (e.g., characteristic speeds or energy-balance identity) rather than an implicit assumption.
- [Spin-excitation formulations] Section on the three spin-excitation formulations: the passage from the rheological constitutive relations to the final first-order system must verify that the internal-state equations remain strictly hyperbolic and dissipative independently of the particular analytical expressions chosen for the rigid relative velocity; if any of the three formulations introduces parameter-dependent characteristic directions, the “any physically meaningful parametrisation” claim is compromised.
minor comments (2)
- [Numerical experiments] Numerical experiments: state the concrete values of n employed and the specific relaxation-time/modulus sets used to generate the steady-state and transient plots; without these, it is difficult to assess how the reported relaxation phenomena scale with the number of Maxwell elements.
- [Notation] Notation: ensure that the transport velocity fields and the rigid-body velocity are denoted consistently between the analytical expressions and the PDE coefficients; minor inconsistencies in subscript usage can obscure the link between the three formulations.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments. We address the two major comments point by point below, clarifying the structure of the proofs and indicating the revisions that will be made to render the well-posedness and passivity arguments fully explicit.
read point-by-point responses
-
Referee: [Abstract / PDE derivation] Abstract and the section deriving the hyperbolic system: the central guarantee that well-posedness and passivity hold for any physically meaningful parametrisation must be shown to survive the spin-induced transport velocities that appear as coefficients in the PDEs; the skeptic concern that these terms can produce non-hyperbolic regions or sign-indefinite dissipation for admissible relaxation times/moduli is load-bearing and requires an explicit check (e.g., characteristic speeds or energy-balance identity) rather than an implicit assumption.
Authors: The transport velocities enter the system only through lower-order terms (advection and source terms) once the rheological constitutive laws are substituted. Consequently, the principal symbol that determines hyperbolicity depends solely on the positive stiffness and viscosity parameters of the Generalized Maxwell or Kelvin-Voigt elements and remains independent of the velocity field. The passivity identity is obtained by multiplying the state equations by the appropriate dual variables and integrating by parts; the resulting dissipation integral is non-negative for any bounded, physically admissible velocity because it contains only the viscoelastic relaxation terms. To remove any ambiguity, the revised manuscript will contain a new appendix that explicitly computes the characteristic speeds (showing they remain real and distinct) and writes out the energy-balance identity for the general spin-excited case. revision: yes
-
Referee: [Spin-excitation formulations] Section on the three spin-excitation formulations: the passage from the rheological constitutive relations to the final first-order system must verify that the internal-state equations remain strictly hyperbolic and dissipative independently of the particular analytical expressions chosen for the rigid relative velocity; if any of the three formulations introduces parameter-dependent characteristic directions, the “any physically meaningful parametrisation” claim is compromised.
Authors: The three formulations differ only in the explicit functional form chosen for the rigid-body velocity (zero spin, constant spin, and spin varying with contact coordinates). Because these expressions appear exclusively in the lower-order terms after substitution of the constitutive relations, they do not alter the coefficient matrix of the highest-order spatial derivatives. Hence the eigenvalues that govern hyperbolicity and the sign of the dissipation remain unchanged across the three cases. The revised section will contain a short paragraph and a short table that list the characteristic speeds for each formulation, confirming that no velocity-dependent directions arise for any admissible set of relaxation parameters. revision: yes
Circularity Check
Minor self-citation to prior FrBD framework; central PDE derivation and well-posedness analysis remain independent
full rationale
The derivation introduces Generalised Maxwell/Kelvin-Voigt rheological models and derives a 2(n+1) hyperbolic PDE system with transport and spin terms specified analytically. Well-posedness and passivity are claimed to hold for any physically meaningful parameters via direct analysis of the resulting first-order system. No quoted step reduces a prediction or uniqueness claim to a fitted input or self-citation chain by construction; the rheological constitutive laws and energy-balance arguments supply independent content. Self-citation to the base FrBD model is present but not load-bearing for the viscoelastic extension or the passivity proof.
Axiom & Free-Parameter Ledger
free parameters (1)
- rheological parameters (relaxation times, moduli)
axioms (2)
- domain assumption Linear viscoelasticity of the bristle element
- domain assumption Analytical specification of transport and rigid relative velocity
Reference graph
Works this paper leans on
-
[2]
Modeling and analysis of friction including rolling effects in multibody dynamics: a review
Marques F, Flores P, Claro JCP, et al. Modeling and analysis of friction including rolling effects in multibody dynamics: a review. Multibody Syst Dyn 45:223–244 (2019). A vailable from: https: //doi.org/10.1007/s11044-018-09640-6
-
[3]
Marques F, Flores P, Pimenta Claro JC, Lankarani HM. A survey and comparison of several friction force models for dynamic analysis of multibody mechanical systems. Nonlinear Dyn 86(3):1407–1443 (2016). A vailable from: https://doi.org/10.1007/s11071-016-2999-3
-
[4]
Knothe K, Stichel S. Rail Vehicle Dynamics. 1st ed. Springer, Cham (2016)
work page 2016
-
[5]
Three-Dimensional Elastic Bodies in Rolling Contact
Kalker JJ. Three-Dimensional Elastic Bodies in Rolling Contact. 1st ed. Springer, Dordrecht (1990). A vailable from: https://doi.org/10.1007/978-94-015-7889-9
-
[6]
Kalker JJ. Rolling Contact Phenomena. In: Jacobson B, Kalker JJ (eds) Rolling Contact Phenomena. International Centre for Mechanical Sciences, vol. 411. Springer, Vienna (2000)
work page 2000
-
[7]
Pacejka HB. Tire and Vehicle Dynamics. 3rd ed. Elsevier, Amsterdam (2012)
work page 2012
-
[8]
The Science of Vehicle Dynamics
Guiggiani M. The Science of Vehicle Dynamics. 3rd ed. Springer, Cham (2023). A vailable from: https://doi.org/10.1007/978-3-031-06461-6
-
[9]
Romano L. Advanced Brush Tyre Modelling. SpringerBriefs in Applied Sciences. Springer, Cham (2022). A vailable from: https://doi.org/10.1007/978-3-030-98435-9
-
[10]
Tire tread wear characteristics: insights from indoor experiments and analytical modeling
Zhang M, Unrau HJ, Gießler M, Gauterin F. Tire tread wear characteristics: insights from indoor experiments and analytical modeling. Tribology International 10 (2025). A vailable from: https: //doi.org/10.1016/j.triboint.2025.110752
-
[12]
Control of a spherical robot: path following based on nonholonomic kinematics and dynamics
Zheng M, Zhan Q, Liu J, Cai Y. Control of a spherical robot: path following based on nonholonomic kinematics and dynamics. Chinese Journal of Aeronautics 23(3):337–345 (2011). A vailable from: https://doi.org/10.1016/S1000-9361(11)60040-X
-
[13]
Dynamics and control of a spherical robot with an internal omni- wheel platform
Karavaev YL, Kilin AA. Dynamics and control of a spherical robot with an internal omni- wheel platform. Regul Chaot Dyn 20:134–152 (2015). A vailable from: https://doi.org/10.1134/ S1560354715020033
work page 2015
-
[14]
Kinematic modeling of spherical rolling robots with a three-omnidirectional-wheel drive mechanism
Ba PD, Dong Hoang Q, Lee SG, Nguyen TH, Quang Duong X, Tham BC. Kinematic modeling of spherical rolling robots with a three-omnidirectional-wheel drive mechanism. Proc. 20th Int. Conf. Control, Automation and Systems (ICCAS), 463–466 (2020). A vailable from: https//doi: 10.23919/ICCAS50221.2020.9268200
-
[15]
Structure and dynamic modelling of a spherical robot
Ghariblu H, Mohammadi H. Structure and dynamic modelling of a spherical robot. Proc. 8th Int. Symp. Mechatronics and Its Applications, 1–5 (2012). A vailable from: https//doi:10.1109/ISMA. 2012.6215159
-
[16]
Modeling of spherical robots rolling on generic surfaces
Hogan FR, Forbes JR. Modeling of spherical robots rolling on generic surfaces. Multibody Syst Dyn 35:91–109 (2015). A vailable from: https://doi.org/10.1007/s11044-014-9438-3
-
[17]
Dynamic modeling of a spherical robot with arms using Kane’s method
Zhuang W, Liu X, Fang C, Sun H. Dynamic modeling of a spherical robot with arms using Kane’s method. Proc. 4th Int. Conf. Natural Computation, 373–377 (2008). A vailable from: https//doi: 10.1109/ICNC.2008.595
-
[18]
Kinematics of spherical robots rolling over 3D terrains
Moazami S, Zargarzadeh H, Palanki S. Kinematics of spherical robots rolling over 3D terrains. Complexity, 14 pages (2019). A vailable from: https://doi.org/10.1155/2019/7543969
-
[19]
Modeling chain continuously variable transmission for direct implementation in transmission control
Yildiz Y, Piccininni A, Bottiglione F, Carbone G. Modeling chain continuously variable transmission for direct implementation in transmission control. Mechanism and Machine Theory 105:428–440 (2016). A vailable from: https://doi.org/10.1016/j.mechmachtheory.2016.07.015
-
[20]
Physics-based modeling of a chain continuously variable trans- mission
Duan C, Hebbale K, Liu F, Yao J. Physics-based modeling of a chain continuously variable trans- mission. Mechanism and Machine Theory 105:397–408 (2016). A vailable from: https://doi.org/ 10.1016/j.mechmachtheory.2016.07.018
-
[21]
Analytical flat belt drive model considering bilinear elastic behaviour with residual strains
Kumaran VU, Weiss L, Zogg M, Wegener K. Analytical flat belt drive model considering bilinear elastic behaviour with residual strains. Mechanism and Machine Theory 190 (2023). A vailable from: https://doi.org/10.1016/j.mechmachtheory.2023.105466
-
[22]
Frendo F, Bucchi F. “Brush model” for the analysis of flat belt transmissions in steady-state con- ditions. Mechanism and Machine Theory 143:103653 (2020). A vailable from: https://doi.org/10. 28 1016/j.mechmachtheory.2019.103653
-
[23]
Frendo F, Bucchi F. Enhanced brush model for the mechanics of power transmission in flat belt drives under steady-state conditions: effect of belt elasticity. Mechanism and Machine Theory 153:103998 (2020). A vailable from: https://doi.org/10.1016/j.mechmachtheory.2020.103998
-
[24]
Bucchi F, Frendo F. Validation of the brush model for the analysis of flat belt transmissions in steady-state conditions by finite element simulation. Mechanism and Machine Theory 167:104556 (2022). A vailable from: https://doi.org/10.1016/j.mechmachtheory.2021.104556
-
[25]
Santeramo M, Putignano C, Vorlaufer G, Krenn S, Carbone G. Viscoelastic steady-state rolling contacts: a generalized boundary element formulation for conformal and non-conformal geometries. Journal of the Mechanics and Physics of Solids 171 (2023). A vailable from: https://doi.org/10. 1016/j.jmps.2022.105129
-
[26]
Simulating gear and bearing interactions in the presence of faults: Part I
Sawalhi N, Randall RB. Simulating gear and bearing interactions in the presence of faults: Part I. The combined gear–bearing dynamic model and the simulation of localised bearing faults. Mech Syst Signal Process 22(8):1924–1951 (2008). A vailable from: https://doi.org/10.1016/j.ymssp. 2007.12.001
-
[27]
Advanced bearing diagnostics: a comparative study of two powerful approaches
Abboud D, Elbadaoui M, Smith W A, Randall RB. Advanced bearing diagnostics: a comparative study of two powerful approaches. Mech Syst Signal Process 114:604–627 (2019). A vailable from: https://doi.org/10.1016/j.ymssp.2018.05.011
-
[28]
Liu Y, Yan C, Shi J, et al. Nonlinear dynamic analysis of supporting bearings in a rotor–bearing system considering vibration interaction. Nonlinear Dyn 113:22435–22458 (2025). A vailable from: https://doi.org/10.1007/s11071-025-11350-6
-
[29]
Dynamic characteristic analysis of a gear–rotor–bearing coupling system considering bearing fit
Zeng Q, Liu Y, Du W, et al. Dynamic characteristic analysis of a gear–rotor–bearing coupling system considering bearing fit. Nonlinear Dyn 113:2131–2154 (2025). A vailable from: https://doi.org/ 10.1007/s11071-024-10290-x
-
[30]
Slip in the rolling contact of two dissimilar elastic rollers
Bentall R, Johnson K. Slip in the rolling contact of two dissimilar elastic rollers. Int J Mech Sci 9:389-404 (1967)
work page 1967
-
[31]
Tractive rolling of dissimilar elastic cylinders
Nowell D, Hills D. Tractive rolling of dissimilar elastic cylinders. Int J Mech Sci 30:427-439 (1988)
work page 1988
-
[32]
Transient phenomena in two elastic cylinders rolling over each other with dry friction
Kalker JJ. Transient phenomena in two elastic cylinders rolling over each other with dry friction. J Appl Mech 37(3):677–688 (1970). A vailable from: https://doi.org/10.1115/1.3408597
-
[33]
Transient rolling contact phenomena
Kalker JJ. Transient rolling contact phenomena. ASLE Trans 14(3):177–184 (1971). A vailable from: https://doi.org/10.1080/05698197108983240
-
[34]
On the Rolling Contact of Two Elastic Bodies in the Presence of Dry Friction
Kalker JJ. On the Rolling Contact of Two Elastic Bodies in the Presence of Dry Friction. PhD thesis, TH Delft (1967)
work page 1967
-
[35]
The rolling contact of a rigid cylinder with a viscoelastic half space
Hunter SC. The rolling contact of a rigid cylinder with a viscoelastic half space. Trans. ASME, Ser. E, J. Appl. Mech. 28:611–617 (1961)
work page 1961
-
[36]
Contact problem of rolling of a viscoelastic cylinder on a base of the same ma- terial
Goryacheva I. Contact problem of rolling of a viscoelastic cylinder on a base of the same ma- terial. J. Appl. Math. Mech. 37(5), 925933 (1973). A vailable from: https://doi.org/10.1016/ 0021-8928(73)90017-8
work page 1973
-
[37]
Three-dimensional Contact of a Rigid Roller Traversing a Viscoelastic Half Space
Panek C, Kalker JJ. Three-dimensional Contact of a Rigid Roller Traversing a Viscoelastic Half Space. J. Inst. Maths Applies 26:299-313 (1980)
work page 1980
-
[38]
Viscoelastic Multilayered Cylinders Rolling With Dry Friction
Kalker JJ. Viscoelastic Multilayered Cylinders Rolling With Dry Friction. ASME. J. Appl. Mech. September 58(3):666–679 (1991). A vailable from: https://doi.org/10.1115/1.2897247
-
[39]
Johnson KL. Contact Mechanics. Cambridge University Press (1985). A vailable from: https://doi. org/10.1017/CBO9781139171731
-
[40]
Contact Mechanics in Tribology
Goryacheva IG. Contact Mechanics in Tribology. Springer (1998)
work page 1998
-
[41]
Barber JR. Contact Mechanics. Springer (2018). A vailable from: https://doi.org/10.1007/ 978-3-319-70939-0
work page 2018
-
[42]
Vollebregt EAH. User Guide for CONTACT. Technical report TR09-03 (version 13)
-
[43]
F ASTSIM2: a second-order accurate frictional rolling con- tact algorithm
Vollebregt EAH, Wilders P. F ASTSIM2: a second-order accurate frictional rolling con- tact algorithm. Comput Mech 47:105–116 (2011). A vailable from: https://doi.org/10.1007/ s00466-010-0536-7
work page 2011
-
[44]
Assessing the accuracy of simplified frictional rolling contact algorithms
Vollebregt EAH, Iwnicki SD, Xie G, Shackelton P. Assessing the accuracy of simplified frictional rolling contact algorithms. Veh Syst Dyn 50(1):1–17 (2012). A vailable from: https://doi.org/10. 1080/00423114.2011.552618
-
[45]
Numerical modeling of measured railway creep–force curves with CONTACT
Vollebregt EAH. Numerical modeling of measured railway creep–force curves with CONTACT. Wear 314:87–95 (2014). A vailable from: https://doi.org/10.1016/j.wear.2013.11.030
-
[46]
New Developments in the Theory of Wheel/Rail Contact Mechanics
Nielsen JB. New Developments in the Theory of Wheel/Rail Contact Mechanics. PhD thesis, Tech- nical University of Denmark (1998). A vailable from: https://orbit.dtu.dk/en/publications/ 29 new-developments-in-the-theory-of-wheelrail-contact-mechanics
work page 1998
-
[47]
Transient rolling of cylindrical contacts with constant and linearly in- creasing applied slip
Dahlberg J, Alfredsson B. Transient rolling of cylindrical contacts with constant and linearly in- creasing applied slip. Wear 266:316–326 (2009). A vailable from: https://doi.org/10.1016/j.wear. 2008.07.008
-
[48]
Contact Mechanics in Tribology
Goryacheva IG. Contact Mechanics in Tribology. 1st ed. Springer Dordrecht (2010). A vailable from: https://doi.org/10.1007/978-94-015-9048-8
-
[49]
Goryacheva I, Sadeghi F. Contact characteristics of a rolling/sliding cylinder and a viscoelastic layer bonded to an elastic substrate. Wear 184(2):125-132 (1995). A vailable from: https://doi.org/10. 1016/0043-1648(94)06561-6
work page 1995
-
[50]
Goryacheva IG, Yakovenko AA: Indentation of a rigid cylinder with a flat rough base into a thin viscoelastic layer. J. Appl. Mech. Tech. Phys., 62(5):723–735 (2021)
work page 2021
-
[51]
Goryacheva IG, Gubenko MM, Makhovskaya YY. Sliding of a spherical indenter on a viscoelastic foundation with the forces of molecular attraction taken into account. Prikl. J. Appl. Mech. Tech. Phys., 55(1):81–88 (2014)
work page 2014
-
[52]
On the rolling contact problem of two elastic solids with graded coatings
Güler MA, Alinia Y, Adibnazari S. On the rolling contact problem of two elastic solids with graded coatings. Int J Mech Sci 64:62-81 (2012)
work page 2012
-
[53]
Subsurface stress evolution under orthotropic wear and frictional contact conditions
Juliá JM, Rodríguez-Tembleque L. Subsurface stress evolution under orthotropic wear and frictional contact conditions. Int J Mech Sci 234:107695 (2022)
work page 2022
-
[54]
Wear and subsurface stress evolution in tractive rolling contact
Juliá JM, Rodríguez-Tembleque L. Wear and subsurface stress evolution in tractive rolling contact. Int J Mech Sci 294, 110195, ISSN 0020-7403 (2025)
work page 2025
-
[55]
Simplified theory of rolling contact
Kalker JJ. Simplified theory of rolling contact. Delft Progress Report, Series C (1973), 1–10
work page 1973
-
[56]
Railway wheel and automotive tyre
Kalker JJ. Railway wheel and automotive tyre. Veh Syst Dyn 5(15):255–269 (1979)
work page 1979
-
[57]
Short-wavelength rail corrugation and non-steady-state contact mechanics
Knothe K, Groß-Thebing A. Short-wavelength rail corrugation and non-steady-state contact mechanics. Veh Syst Dyn 46(1–2):49–66 (2008). A vailable from: https://doi.org/10.1080/ 00423110701590180
work page 2008
-
[58]
Non-steady-state modelling of wheel–rail contact for dynamic simulation of railway vehicles
Alonso A, Giménez JG. Non-steady-state modelling of wheel–rail contact for dynamic simulation of railway vehicles. Veh Syst Dyn 46(3):179–196 (2008). A vailable from: https://doi.org/10.1080/ 00423110701248011
work page 2008
-
[59]
Non-steady-state modelling of wheel–rail contact
Guiral A, Alonso A, Baeza L, Giménez JG. Non-steady-state modelling of wheel–rail contact. Veh Syst Dyn 51(1):91–108 (2013). A vailable from: https://doi.org/10.1080/00423114.2012. 713499
-
[60]
Influence of longitudinal creepage and wheel inertia on short-pitch corruga- tion
Ciavarella M, Barber J. Influence of longitudinal creepage and wheel inertia on short-pitch corruga- tion. Proc IMechE Part J: Eng Tribol 222(3) (2008). A vailable from: https://doi.org/10.1243/ 13506501JET373
work page 2008
-
[61]
Short-pitch rail corrugation: a resonance-free regime? Wear 266:9–10 (2008)
Afferrante L, Ciavarella M. Short-pitch rail corrugation: a resonance-free regime? Wear 266:9–10 (2008). A vailable from: https://doi.org/10.1016/j.wear.2008.12.003
-
[63]
A model of the transient behavior of tractive rolling contacts
Al-Bender F, De Moerlooze K. A model of the transient behavior of tractive rolling contacts. Ad- vances in Tribology (2008). A vailable from: https://doi.org/10.1155/2008/214894
-
[64]
Romano L, Bruzelius F, Jacobson B. Unsteady-state brush theory. Veh Syst Dyn (2020). A vailable from: https://doi.org/10.1080/00423114.2020.1774625
-
[65]
Romano L, Timpone F, Bruzelius F, Jacobson B. Analytical results in transient brush tyre models: theory for large camber angles and classic solutions with limited friction. Meccanica 57:165–191 (2022). A vailable from: http://dx.doi.org/10.1007/s11012-021-01422-3
-
[66]
Rolling, tilting and spinning spherical wheels: analytical results using brush theory
Romano L, Timpone F, Bruzelius F, Jacobson B. Rolling, tilting and spinning spherical wheels: analytical results using brush theory. Mechanism and Machine Theory 173:104836 (2022). A vailable from: https://doi.org/10.1016/j.mechmachtheory.2022.104836
-
[68]
Transient wheel–rail rolling contact theories
Romano L, Maglio M, Bruni S. Transient wheel–rail rolling contact theories. Tribology International (2023)
work page 2023
-
[69]
The model of dry friction in the problem of rolling rigid bodies
Zhuravlev VP. The model of dry friction in the problem of rolling rigid bodies. J Appl Math Mech 62(5):705–710 (1998)
work page 1998
-
[70]
Friction laws in the case of combination of slip and spin
Zhuravlev VP. Friction laws in the case of combination of slip and spin. Mech Solids 38(4):52–58 (2003). 30
work page 2003
-
[71]
About the motion of a symmetric rigid solid on a plane
Kireenkov AA. About the motion of a symmetric rigid solid on a plane. Proc. 8th Conf. DSTA, 95–102 (2005)
work page 2005
-
[72]
Combined model of sliding and rolling friction in the dynamics of bodies on a rough plane
Kireenkov AA. Combined model of sliding and rolling friction in the dynamics of bodies on a rough plane. Mech Solids 43(3):412–425 (2008)
work page 2008
-
[73]
A new model for control of systems with friction
Canudas-de-Wit C, Olsson H, Åström KJ, Lischinsky P. A new model for control of systems with friction. IEEE Trans Autom Control 40(3):419–425 (1995)
work page 1995
-
[74]
Olsson H. Control Systems with Friction. Doctoral thesis, Lund Institute of Technology (1996)
work page 1996
-
[75]
Revisiting the LuGre friction model
Åström KJ, Canudas-de-Wit C. Revisiting the LuGre friction model. IEEE Control Syst Mag 28(6):101–114 (2008)
work page 2008
-
[76]
Sorine M, Szymanski J. A new dynamic multi d.o.f. tire model. Transportation Systems 2000, Braun- schweig (2000)
work page 2000
-
[77]
Dynamic tire friction models for vehicle traction control
Canudas-de-Wit C, Tsiotras P. Dynamic tire friction models for vehicle traction control. Proc. 38th IEEE CDC, 3746–3751 (1999). A vailable from: https//doi:10.1109/CDC.1999.827937
-
[78]
Dynamic friction models for road/tire longitudinal interaction
Canudas-de-Wit C, Tsiotras P, Velenis E, et al. Dynamic friction models for road/tire longitudinal interaction. Veh Syst Dyn 39(3):189–226 (2003). A vailable from: https//doi:10.1076/vesd.39.3. 189.14152
-
[79]
Dynamic tyre friction models for combined slip
Velenis E, Tsiotras P, Canudas-de-Wit C, Sorine M. Dynamic tyre friction models for combined slip. Veh Syst Dyn 43:3–29 (2005). A vailable from: https//doi:10.1080/00423110412331290464
-
[80]
Modeling and analysis of longitudinal tire dynamics based on the LuGre friction model
Deur J. Modeling and analysis of longitudinal tire dynamics based on the LuGre friction model. IF AC Proc Vol 34(1):91–96 (2001). A vailable from: https://doi.org/10.1016/S1474-6670(17) 34383-5
-
[81]
A 3D brush-type dynamic tire friction model
Deur J, Asgari J, Hrovat D. A 3D brush-type dynamic tire friction model. Veh Syst Dyn 42(3):133– 173 (2004). A vailable from: https://doi.org/10.1080/00423110412331282887
-
[82]
Extensions of the LuGre tyre friction model for vari- able slip speed
Deur J, Ivanović V, Troulis M, et al. Extensions of the LuGre tyre friction model for vari- able slip speed. Veh Syst Dyn 43(1):508–524 (2005). A vailable from: https//doi:10.1080/ 00423110500229808
work page 2005
-
[83]
An integrated friction model with improved presliding behavior
Swevers J, Al-Bender F, Ganseman CG, Projogo T. An integrated friction model with improved presliding behavior. IEEE Trans Autom Control 45(4):675–686 (2000)
work page 2000
-
[84]
Modification of the Leuven integrated friction model
Lampaert V, Swevers J, Al-Bender F. Modification of the Leuven integrated friction model. IEEE Trans Autom Control 47(4):683–687 (2002)
work page 2002
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.