Symplectic Neural Operators for Learning Infinite Dimensional Hamiltonian Systems
Pith reviewed 2026-05-19 19:18 UTC · model grok-4.3
The pith
Symplectic neural operators preserve structure to guarantee long-term stability in infinite-dimensional Hamiltonian systems.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The Symplectic Neural Operator is constructed so that the learned mapping on the infinite-dimensional phase space preserves the symplectic form. The paper supplies a theoretical characterization of this preservation property and combines it with a learning-accuracy assumption to obtain a rigorous long-term stability theorem. Experiments on standard Hamiltonian PDEs confirm that the resulting models maintain better energy behavior than non-structure-preserving neural operators.
What carries the argument
The Symplectic Neural Operator, a neural-operator architecture whose layers are designed to enforce preservation of the symplectic two-form on the infinite-dimensional phase space.
If this is right
- Long-time simulations of Hamiltonian PDEs remain stable without artificial numerical dissipation.
- Error bounds derived from symplecticity plus accuracy apply uniformly across a family of Hamiltonian PDEs.
- The method reduces the need for ad-hoc stabilization techniques in learned infinite-dimensional dynamical systems.
- Structure preservation and data fidelity together control global behavior even when local approximation error is small but nonzero.
Where Pith is reading between the lines
- The same design principle could be adapted to enforce other geometric invariants such as volume preservation for incompressible flows.
- Hybrid models that combine the Symplectic Neural Operator with classical symplectic integrators might further extend stable prediction horizons.
- The stability result suggests that structure-preserving architectures may lower sample complexity for reliable long-horizon forecasting in physical systems.
Load-bearing premise
The learned operator must approximate the true dynamics with sufficient accuracy for the long-term stability guarantee to hold.
What would settle it
Numerical integration of a canonical Hamiltonian PDE for integration times orders of magnitude longer than the training horizon, showing whether the Hamiltonian energy remains bounded for the Symplectic Neural Operator while drifting for otherwise comparable non-symplectic operators.
Figures























read the original abstract
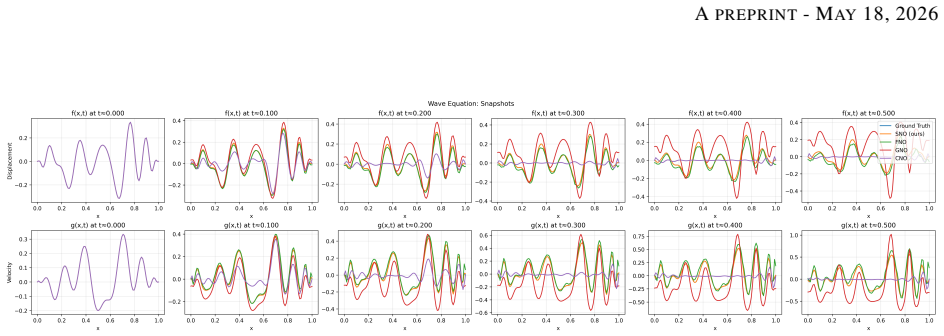
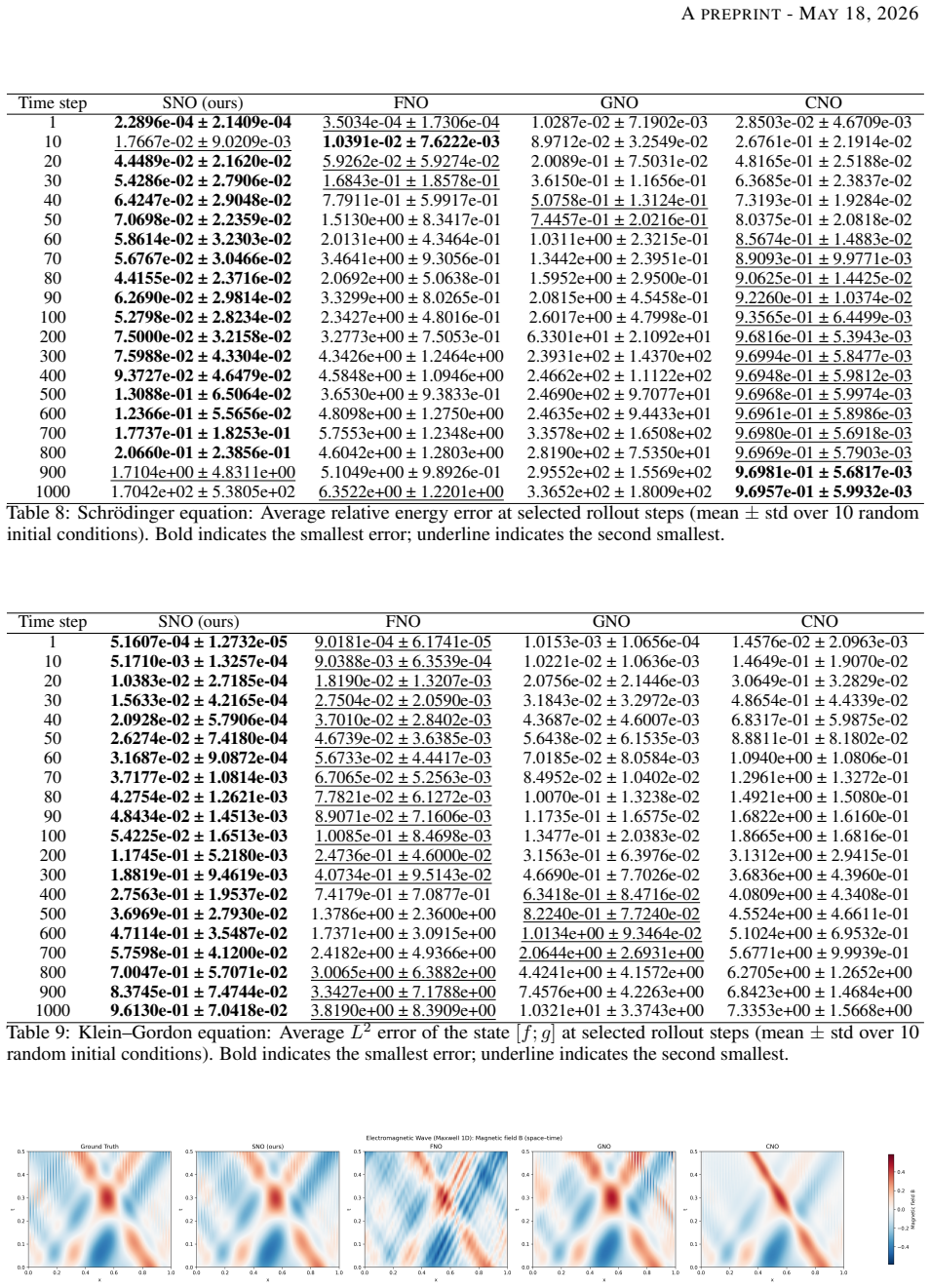
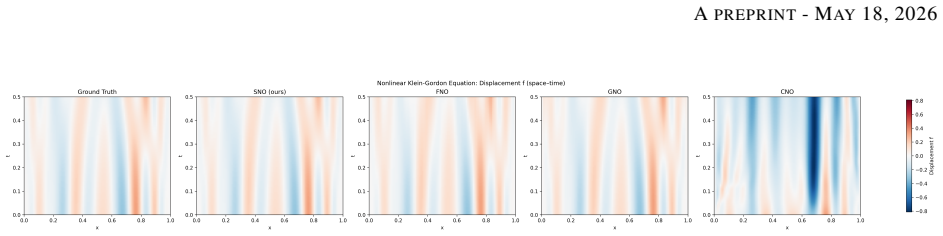
The modeling and simulation of infinite-dimensional Hamiltonian systems are central problems in mathematical physics and engineering, however they pose significant computational and structural challenges for standard data-driven architectures. In this work, we introduce the Symplectic Neural Operator, a neural operator architecture designed to preserve the symplectic structure intrinsic to Hamiltonian PDEs. We provide a theoretical characterization of their symplecticity and establish a rigorous long-term stability result based on the combination of symplectic structure preservation and learning accuracy. Numerical experiments on canonical Hamiltonian PDEs corroborate this theoretical result and show that SNOs exhibit improved energy behavior compared with non-structure-preserving neural operators.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces Symplectic Neural Operators (SNOs), a neural operator architecture for learning infinite-dimensional Hamiltonian systems that preserves the symplectic structure. It claims a theoretical characterization of this symplecticity together with a rigorous long-term stability result that follows from the combination of exact structure preservation and sufficient learning accuracy. Numerical experiments on canonical Hamiltonian PDEs are presented to corroborate the theory and demonstrate improved long-term energy behavior relative to non-structure-preserving baselines.
Significance. If the stability theorem supplies the required quantitative error controls that remain uniform in the infinite-dimensional function space, the contribution would be significant for structure-preserving data-driven modeling of Hamiltonian PDEs. The explicit linkage of symplecticity preservation to long-term stability, together with the numerical evidence of reduced energy drift, addresses a central practical difficulty in simulating such systems over extended times.
major comments (2)
- [§4.2, Theorem 4.1] §4.2, Theorem 4.1: The long-term stability result is stated to follow from symplectic preservation plus learning accuracy, yet the proof does not supply an explicit operator-norm error threshold that is independent of spatial discretization and sufficient to control high-frequency modes in the relevant Sobolev or Hilbert space (e.g., H¹ × L²). Without such a uniform bound, the guarantee can fail when small approximation errors are amplified over long horizons.
- [§3.1] §3.1, Definition of the SNO architecture: The characterization of symplecticity is given for the continuous operator, but the manuscript does not verify that the finite-dimensional neural-network realization (with its specific quadrature or discretization) inherits the exact symplectic property up to controllable truncation error; this step is load-bearing for the subsequent stability claim.
minor comments (2)
- [Figure 3] Figure 3: The energy-error plots would be clearer if the time axis were extended to the full horizon used in the stability theorem and if a non-structure-preserving baseline with comparable parameter count were included for direct comparison.
- [§2] Notation in §2: The distinction between the continuous symplectic form ω and its discrete counterpart is not always explicit; a short remark clarifying the function space (e.g., H¹(Ω) × L²(Ω)) would aid readability.
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive feedback on our manuscript. We address each major comment below and outline the revisions we will incorporate to strengthen the presentation and rigor of the results.
read point-by-point responses
-
Referee: [§4.2, Theorem 4.1] §4.2, Theorem 4.1: The long-term stability result is stated to follow from symplectic preservation plus learning accuracy, yet the proof does not supply an explicit operator-norm error threshold that is independent of spatial discretization and sufficient to control high-frequency modes in the relevant Sobolev or Hilbert space (e.g., H¹ × L²). Without such a uniform bound, the guarantee can fail when small approximation errors are amplified over long horizons.
Authors: We appreciate this observation. The current proof of Theorem 4.1 establishes long-term stability under the assumption that the learned operator is sufficiently close to the true Hamiltonian flow in the appropriate norm on the infinite-dimensional space, leveraging exact symplecticity to prevent energy drift. However, we agree that an explicit, discretization-independent operator-norm threshold would make the quantitative control over high-frequency modes fully transparent. We will revise the theorem statement and its proof to derive and state such an explicit error bound, uniform with respect to spatial discretization parameters, ensuring the stability guarantee holds in the relevant Sobolev spaces. revision: yes
-
Referee: [§3.1] §3.1, Definition of the SNO architecture: The characterization of symplecticity is given for the continuous operator, but the manuscript does not verify that the finite-dimensional neural-network realization (with its specific quadrature or discretization) inherits the exact symplectic property up to controllable truncation error; this step is load-bearing for the subsequent stability claim.
Authors: We acknowledge that the symplecticity characterization in §3.1 is developed at the continuous operator level. To address the practical realization, we will add a dedicated paragraph (or short subsection) following Definition 3.1 that specifies the quadrature and discretization scheme employed in the neural operator implementation. We will then prove that the resulting finite-dimensional map preserves the symplectic structure up to a truncation error controlled by the discretization parameter (e.g., mesh size or quadrature order), with the error bound made explicit. This addition will directly support the applicability of the stability result to the implemented architecture. revision: yes
Circularity Check
No significant circularity in derivation chain
full rationale
The paper's central claims consist of a theoretical characterization of symplecticity for the proposed neural operator architecture and a long-term stability result derived from the combination of exact structure preservation plus approximation accuracy. These elements are presented as independent mathematical properties rather than reducing to fitted parameters, self-referential definitions, or load-bearing self-citations. The abstract and description contain no equations or steps that equate a prediction directly to an input by construction, and the stability argument is framed as following from separate preservation and error-control conditions without circular reduction. This is the expected outcome for a structure-preserving operator paper whose core results rest on external analysis of Hamiltonian systems.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Infinite-dimensional Hamiltonian systems possess an intrinsic symplectic structure.
invented entities (1)
-
Symplectic Neural Operator
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel echoes?
echoesECHOES: this paper passage has the same mathematical shape or conceptual pattern as the Recognition theorem, but is not a direct formal dependency.
Theorem 4.10 (Modified-Hamiltonian stability of SNO) ... |H(un)−H(u0)| ≤ Cε + Cnε^{m+1}
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Hornik, Kurt and Stinchcombe, Maxwell and White, Halbert , title =. Neural Networks , volume =. 1989 , doi =
work page 1989
-
[2]
IEEE Transactions on Neural Networks , volume =
Chen, Tianping and Chen, Hong , title =. IEEE Transactions on Neural Networks , volume =. 1995 , doi =
work page 1995
-
[3]
Lu, Lu and Jin, Pengzhan and Karniadakis, George Em , title =. arXiv preprint arXiv:1910.03193 , year =. doi:10.48550/arXiv.1910.03193 , url =
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.1910.03193 1910
-
[4]
Nature Machine Intelligence , volume =
Lu, Lu and Jin, Pengzhan and Pang, Guofei and Zhang, Zhongqiang and Karniadakis, George Em , title =. Nature Machine Intelligence , volume =. 2021 , doi =
work page 2021
-
[5]
Neural Operator: Graph Kernel Network for Partial Differential Equations
Li, Zongyi and Kovachki, Nikola and Azizzadenesheli, Kamyar and Liu, Burigede and Bhattacharya, Kaushik and Stuart, Andrew and Anandkumar, Anima , title =. arXiv preprint arXiv:2003.03485 , year =. doi:10.48550/arXiv.2003.03485 , url =
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2003.03485 2003
-
[6]
arXiv preprint arXiv:2006.09535 , year =
Li, Zongyi and Kovachki, Nikola and Azizzadenesheli, Kamyar and Liu, Burigede and Bhattacharya, Kaushik and Stuart, Andrew and Anandkumar, Anima , title =. arXiv preprint arXiv:2006.09535 , year =. doi:10.48550/arXiv.2006.09535 , url =
-
[7]
and Anandkumar, Anima , title =
Li, Zongyi and Kovachki, Nikola and Azizzadenesheli, Kamyar and Liu, Burigede and Bhattacharya, Kaushik and Stuart, Andrew M. and Anandkumar, Anima , title =. International Conference on Learning Representations , year =
-
[8]
Journal of Machine Learning Research , volume =
Kovachki, Nikola and Lanthaler, Samuel and Mishra, Siddhartha , title =. Journal of Machine Learning Research , volume =. 2021 , url =
work page 2021
-
[9]
Journal of Machine Learning Research , volume =
Kovachki, Nikola and Li, Zongyi and Liu, Burigede and Azizzadenesheli, Kamyar and Bhattacharya, Kaushik and Stuart, Andrew and Anandkumar, Anima , title =. Journal of Machine Learning Research , volume =. 2023 , url =
work page 2023
-
[10]
Convolutional Neural Operators for Robust and Accurate Learning of PDEs , journal =
Raoni. Convolutional Neural Operators for Robust and Accurate Learning of PDEs , journal =. 2023 , doi =
work page 2023
- [11]
-
[12]
Chernoff, Paul R. and Marsden, Jerrold E. , title =. 1974 , doi =
work page 1974
-
[13]
Bulletin of the American Mathematical Society , volume =
Weinstein, Alan , title =. Bulletin of the American Mathematical Society , volume =. 1969 , pages =
work page 1969
- [14]
-
[15]
Proceedings of the American Mathematical Society , volume =
Bambusi, Dario , title =. Proceedings of the American Mathematical Society , volume =. 1999 , pages =
work page 1999
-
[16]
Bulletin des Sciences Math\'ematiques , volume =
Pelletier, Fernand , title =. Bulletin des Sciences Math\'ematiques , volume =. 2021 , pages =
work page 2021
-
[17]
Jin, Pengzhan and Zhang, Zhen and Zhu, Aiqing and Tang, Yifa and Karniadakis, George Em , title =. Neural Networks , volume =. 2020 , pages =
work page 2020
- [18]
-
[19]
Yoshida, Haruo , title =. Physics Letters A , volume =. 1990 , doi =
work page 1990
-
[20]
Hairer, Ernst and Lubich, Christian and Wanner, Gerhard , title =. 2006 , doi =
work page 2006
-
[21]
Sanz-Serna, J. M. and Calvo, M. P. , title =. 1994 , isbn =
work page 1994
-
[22]
Physics-informed neural operator for learning partial differential equations
Physics-Informed Neural Operator for Learning Partial Differential Equations , author =. arXiv preprint , year =. 2111.03794 , archivePrefix =
-
[23]
ICLR 2020 Workshop on ODE/PDE + Deep Learning , year =
Lagrangian Neural Networks , author =. ICLR 2020 Workshop on ODE/PDE + Deep Learning , year =
work page 2020
-
[24]
and Reich, Sebastian , title =
Bridges, Thomas J. and Reich, Sebastian , title =. Physics Letters A , volume =. 2001 , doi =
work page 2001
-
[25]
Hamiltonian neural networks, 2019
Greydanus, Sam and Dzamba, Misko and Yosinski, Jason , title =. arXiv preprint arXiv:1906.01563 , year =. doi:10.48550/arXiv.1906.01563 , url =
-
[26]
International Conference on Learning Representations (ICLR) , year =
Symplectic ODE-Net: Learning Hamiltonian Dynamics with Control , author =. International Conference on Learning Representations (ICLR) , year =
-
[27]
Methods of Modern Mathematical Physics I: Functional Analysis , author=. 1980 , publisher=
work page 1980
- [28]
-
[29]
Functional Analysis, Spectral Theory, and Applications , author =. 2017 , doi =
work page 2017
-
[30]
Spectral Theory: Basic Concepts and Applications , author =. 2020 , doi =
work page 2020
-
[31]
Introduction to Mechanics and Symmetry: A Basic Exposition of Classical Mechanical Systems , author =. 1999 , publisher =
work page 1999
-
[32]
Multi-symplectic integrators: numerical schemes for Hamiltonian PDEs that conserve symplecticity , author =. Physics Letters A , volume =. 2001 , doi =
work page 2001
-
[33]
Frontiers in Handwriting Recognition (ICFHR), 2014 14th International Conference on , pages=
Real-time segmentation of on-line handwritten arabic script , author=. Frontiers in Handwriting Recognition (ICFHR), 2014 14th International Conference on , pages=. 2014 , organization=
work page 2014
-
[34]
Soft Computing and Pattern Recognition (SoCPaR), 2014 6th International Conference of , pages=
Fast classification of handwritten on-line Arabic characters , author=. Soft Computing and Pattern Recognition (SoCPaR), 2014 6th International Conference of , pages=. 2014 , organization=
work page 2014
-
[35]
Estimate and Replace: A Novel Approach to Integrating Deep Neural Networks with Existing Applications , author=. arXiv preprint arXiv:1804.09028 , year=
work page internal anchor Pith review Pith/arXiv arXiv
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.