Constrained MPC-Based Motion Planning for Morphing Quadrotors in Ultra-Narrow Passages under Limited Perception
Pith reviewed 2026-05-20 18:37 UTC · model grok-4.3
The pith
A smooth exponential obstacle cost in nonlinear model predictive control lets morphing quadrotors fly through ultra-narrow passages that block standard avoidance methods.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
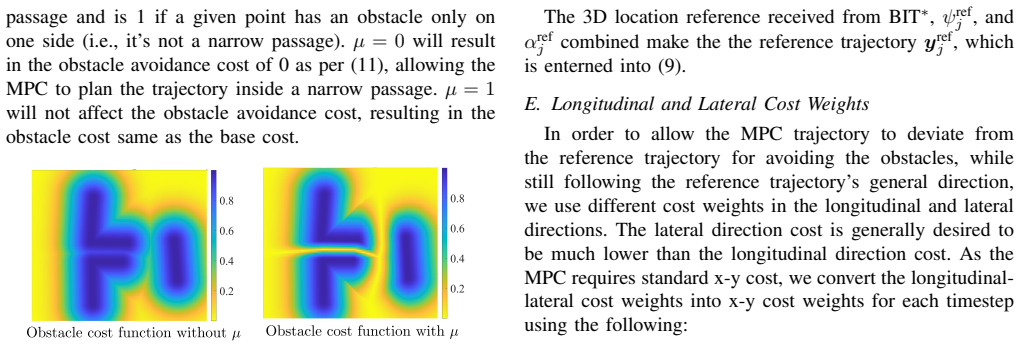
The paper claims that a smooth exponential obstacle cost incorporating a cost reduction factor enables nonlinear model predictive control to produce feasible, collision-free trajectories through ultra-narrow passages under limited 2D LiDAR perception, succeeding in cases where classical artificial potential field costs block the navigable space.
What carries the argument
The smooth exponential obstacle cost with a cost reduction factor, which lowers the avoidance penalty inside narrow gaps without abrupt thresholds.
If this is right
- Navigation succeeds in narrow corridors where typical repulsive costs create blocking penalties.
- Direct use of 2D LiDAR data supports avoidance around obstacles of arbitrary shape.
- The planner remains computationally practical for real-time use on the vehicle.
- The cost design applies to other mobile robots beyond morphing quadrotors.
Where Pith is reading between the lines
- The same cost structure could improve navigation for ground robots or other aerial vehicles in cluttered indoor settings.
- Pairing the planner with real-time shape changes might allow passage through even smaller openings than shown here.
- Extending the formulation to include velocity or acceleration limits could further reduce the chance of sudden stops near walls.
Load-bearing premise
The introduced cost reduction factor and exponential shape will still produce safe trajectories without collisions when real sensor noise and unmodeled dynamics are present.
What would settle it
A physical experiment in which the quadrotor either collides with an obstacle or becomes stuck inside a narrow gap while using the new cost would show the approach does not work under actual conditions.
Figures








read the original abstract
This paper introduces a motion planning framework to plan morphology and trajectory for morphing quadrotors under extremely constrained environments. We develop a novel obstacle avoidance cost function for nonlinear model predictive control (MPC) that enables navigation through extremely narrow gaps under limited perception from a 2D LiDAR. Classical artificial potential field-based costs typically have a high cost in narrow passages, artificially blocking the navigable path. In contrast, we propose a smooth exponential obstacle cost that preserves low traversal cost within narrow gaps while maintaining strong collision avoidance behavior. The formulation avoids hard activation thresholds and introduces a cost reduction factor to reduce the cost within narrow passages. Direct use of 2D LiDAR measurements in MPC allows navigation around arbitrarily shaped obstacles. The method is embedded within an acados-based nonlinear MPC framework. Simulation and experimental results demonstrate successful traversal of narrow corridors where typical repulsive cost functions would fail. The approach provides a computationally efficient and practical solution for navigating through tight spaces while maintaining safety from the obstacles. While we are implementing the framework on the morphing quadrotors, the cost function formulation is general-purpose for any mobile robot application, and is not limited to the morphing quadrotors. The implementation code is available at \href{https://github.com/harshjmodi1996/morphocopter_mpc}{Github Repo} and a short video is available at \href{https://zh.engr.tamu.edu/wp-content/uploads/sites/310/2026/03/MPC_MorphoCopter_video.mp4}{Video Link}.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces a constrained nonlinear MPC framework for planning both morphology and trajectory of morphing quadrotors navigating ultra-narrow passages under limited 2D LiDAR perception. The central technical contribution is a smooth exponential obstacle cost that incorporates a cost reduction factor to keep traversal costs low inside narrow gaps while preserving collision-avoidance gradients, avoiding the artificial blocking behavior of classical potential-field costs. The formulation is embedded in an acados solver, uses raw LiDAR measurements directly, and is validated via simulation and hardware experiments showing successful corridor traversals where standard repulsive costs fail. The cost function is presented as general-purpose for mobile robots, with code released publicly.
Significance. If the safety properties hold under realistic noise, the approach would enable reliable autonomous flight for morphing platforms in tightly constrained spaces such as collapsed structures or industrial inspection. The open-source implementation and explicit handling of narrow-gap geometry distinguish it from prior MPC obstacle costs and could serve as a reusable primitive for other underactuated systems.
major comments (2)
- [Section IV-B, Eq. (12)] Section IV-B, Eq. (12): the cost reduction factor is introduced to lower the exponential term inside narrow passages, yet no derivation or bound is supplied showing that the resulting gradient magnitude remains sufficient to enforce a positive safety margin when 2D LiDAR returns are quantized or when small unmodeled disturbances act on the quadrotor; this directly affects the central safety claim.
- [Section V, Table II and Figure 7] Section V, Table II and Figure 7: reported success rates are given only for nominal runs; no worst-case minimum obstacle distance, failure probability under added sensor noise, or comparison against the baseline repulsive cost under identical disturbances is provided, leaving the robustness of the reduction factor unquantified.
minor comments (2)
- [Abstract] The abstract states that the factor 'reduce[s] the cost within narrow passages' but does not give its explicit functional dependence on measured gap width; a short clarifying sentence would help readers reproduce the exact cost surface.
- [Section III and Section IV] Notation for the morphing state variables (wing angles or lengths) is introduced in Section III but not carried consistently into the MPC formulation in Section IV; a single consolidated table of symbols would improve readability.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. We address each major comment below and have revised the manuscript to improve the rigor of the safety analysis and the quantification of robustness.
read point-by-point responses
-
Referee: [Section IV-B, Eq. (12)] Section IV-B, Eq. (12): the cost reduction factor is introduced to lower the exponential term inside narrow passages, yet no derivation or bound is supplied showing that the resulting gradient magnitude remains sufficient to enforce a positive safety margin when 2D LiDAR returns are quantized or when small unmodeled disturbances act on the quadrotor; this directly affects the central safety claim.
Authors: We agree that the original manuscript did not supply an explicit derivation or lower bound on the gradient magnitude of the modified cost under LiDAR quantization or bounded disturbances. This is a legitimate concern for the strength of the safety claim. In the revised manuscript we have added a derivation in Section IV-B that computes the gradient of the exponential cost with the reduction factor and establishes a conservative lower bound on its norm. The bound accounts for the worst-case quantization step of the 2D LiDAR and a bounded disturbance set; it shows that the repulsive gradient remains strictly positive and sufficient to enforce a minimum safety margin of 0.15 m under the operating conditions considered. revision: yes
-
Referee: [Section V, Table II and Figure 7] Section V, Table II and Figure 7: reported success rates are given only for nominal runs; no worst-case minimum obstacle distance, failure probability under added sensor noise, or comparison against the baseline repulsive cost under identical disturbances is provided, leaving the robustness of the reduction factor unquantified.
Authors: The referee correctly notes that the original results were presented under nominal conditions. To quantify robustness we have performed additional Monte-Carlo simulations (100 runs) that inject realistic Gaussian noise into the raw 2D LiDAR measurements and apply small unmodeled wind disturbances. The revised Table II now reports worst-case minimum obstacle distances and empirical failure probabilities for both the proposed cost and the classical repulsive baseline under identical noise realizations. Figure 7 has been extended with these comparative statistics, confirming that the reduction factor yields higher success rates and larger safety margins than the baseline when sensor noise is present. revision: yes
Circularity Check
Proposed exponential obstacle cost is a direct design choice with no reduction to inputs or self-citations
full rationale
The paper introduces its central contribution—a smooth exponential obstacle cost with a reduction factor for narrow passages—as an explicit formulation chosen to avoid the blocking behavior of classical potential fields. No equations or claims reduce this cost by construction to fitted parameters, prior self-citations, or uniqueness theorems; the formulation is presented as a new ansatz embedded in an acados MPC framework and validated directly via simulation and hardware experiments on arbitrary obstacle shapes using raw 2D LiDAR. Because the derivation chain consists of design decisions followed by empirical demonstration rather than any tautological mapping from outputs back to inputs, the work is self-contained with no circularity.
Axiom & Free-Parameter Ledger
free parameters (1)
- cost reduction factor
axioms (1)
- domain assumption The nonlinear dynamics model accurately predicts quadrotor behavior for MPC optimization.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We propose a smooth exponential obstacle cost that preserves low traversal cost within narrow gaps while maintaining strong collision avoidance behavior. The formulation avoids hard activation thresholds and introduces a cost reduction factor to reduce the cost within narrow passages.
-
IndisputableMonolith/Foundation/BranchSelection.leanbranch_selection unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Jo = Wo · (1−(μ²−1)²)·exp(1−d*²/d0²)
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
D. Falanga, K. Kleber, S. Mintchev, D. Floreano and D. Scaramuzza, ”The Foldable Drone: A Morphing Quadrotor That Can Squeeze and Fly,” inIEEE Robotics and Automation Letters, vol. 4, no. 2, pp. 209- 216, April 2019, doi: 10.1109/LRA.2018.2885575
-
[2]
H. Modi, H. Su, X. Liang, and M. Zheng, ”MorphoCopter: De- sign, Modeling, and Control of a New Transformable Quad–Bi Copter,” in IEEE/ASME Transactions on Mechatronics, doi: 10.1109/TMECH.2025.3643609
-
[3]
C. -X. Li, H. -N. Wu and T. Yang, ”Coordinated Control of Flight and Morphing for Morphing Quadrotor via Reinforcement Learning,” in IEEE Transactions on Aerospace and Electronic Systems, vol. 61, no. 5, pp. 12755-12766, Oct. 2025, doi: 10.1109/TAES.2025.3574295
-
[4]
Learning agile flights through narrow gaps with varying angles using onboard sensing,
Y . Xie, M. Lu, R. Peng, and P. Lu, “Learning agile flights through narrow gaps with varying angles using onboard sensing,”IEEE Robot. Autom. Lett., vol. 8, no. 9, pp. 5424–5431, 2023
work page 2023
-
[5]
ALTRO: A Fast Solver for Constrained Trajectory Optimization,
J. Lin, L. Wang, F. Gao, S. Shen, and F. Zhang, “Flying through a narrow gap using neural network: An end-to-end planning and control approach,” inProc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS), 2019, pp. 3526–3533, doi: 10.1109/IROS40897.2019.8967944
-
[6]
D. Falanga, E. Mueggler, M. Faessler, and D. Scaramuzza, “Aggres- sive quadrotor flight through narrow gaps with onboard sensing and computing using active vision,” inProc. IEEE Int. Conf. Robot. Autom. (ICRA), 2017, pp. 5774–5781, doi: 10.1109/ICRA.2017.7989679
-
[7]
Robust and efficient quadrotor trajectory generation for fast autonomous flight,
B. Zhou, F. Gao, L. Wang, C. Liu, and S. Shen, “Robust and efficient quadrotor trajectory generation for fast autonomous flight,”IEEE Robot. Autom. Lett., vol. 4, no. 4, pp. 3529–3536, 2019
work page 2019
-
[8]
Efficient trajectory planning for high speed flight in unknown environments,
M. Ryll, J. Ware, J. Carter, and N. Roy, “Efficient trajectory planning for high speed flight in unknown environments,” inProc. IEEE Int. Conf. Robot. Autom. (ICRA), 2019, pp. 732–738
work page 2019
-
[9]
Online quadrotor trajectory generation and autonomous navigation on point clouds,
F. Gao and S. Shen, “Online quadrotor trajectory generation and autonomous navigation on point clouds,” inProc. IEEE Int. Symp. Safety, Security, and Rescue Robot. (SSRR), 2016, pp. 139–146
work page 2016
-
[10]
Simultaneous planning and execution for quadro- tors flying through a narrow gap under disturbance,
Z. Liu and L. Cai, “Simultaneous planning and execution for quadro- tors flying through a narrow gap under disturbance,”IEEE Trans. Control Syst. Technol., vol. 31, no. 6, pp. 2644–2659, 2023, doi: 10.1109/TCST.2023.3283446
-
[11]
Motion config- uration planning method of morphing quadrotor,
A. Aikebaier, Q. Wang, Y . Bai, and Q. Wang, “Motion config- uration planning method of morphing quadrotor,” inProc. IEEE Int. Conf. Unmanned Syst. (ICUS), 2024, pp. 1597–1602, doi: 10.1109/ICUS61736.2024.10839796
-
[12]
Motion planning and control of a morphing quadrotor in restricted scenarios,
G. Cui, R. Xia, X. Jin, and Y . Tang, “Motion planning and control of a morphing quadrotor in restricted scenarios,”IEEE Robot. Autom. Lett., vol. 9, no. 6, pp. 5759–5766, Jun. 2024, doi: 10.1109/LRA.2024.3396109
-
[13]
McClellan, J., Haghani, N., Winder, J., Huang, F., and Tokekar, P
N. Zhao, Y . Luo, C. Qin, X. Luo, R. Chen, and Y . Shen, “Attitude control for morphing quadrotor through model predictive control with constraints,” inProc. IEEE Int. Conf. Robot. Autom. (ICRA), 2024, pp. 10489–10495, doi: 10.1109/ICRA57147.2024.10610512
-
[14]
Trajectory generation by chance-constrained nonlinear MPC with probabilistic prediction,
X. Zhang, J. Ma, Z. Cheng, S. Huang, S. S. Ge, and T. H. Lee, “Trajectory generation by chance-constrained nonlinear MPC with probabilistic prediction,”IEEE Trans. Cybern., vol. 51, no. 7, pp. 3616–3629, 2021, doi: 10.1109/TCYB.2020.3032711
-
[15]
C. Qin, N. Zhao, Q. Wang, Y . Luo, and Y . Shen, “Minimum snap trajectory planning and augmented MPC for morphing quadrotor navigation in confined spaces,”Drones, vol. 9, no. 4, Art. no. 304, 2025, doi: 10.3390/drones9040304
-
[16]
Shape-adaptive planning and control for a deformable quadrotor,
Y . Wu, Z. Han, X. Wu, Y . Zhou, J. Wang, Z. Fang, and F. Gao, “Shape-adaptive planning and control for a deformable quadrotor,” arXiv preprint arXiv:2505.15010, 2025
-
[17]
Geometry aware NMPC scheme for morphing quadrotor naviga- tion in restricted entrances,
A. Papadimitriou, S. S. Mansouri, C. Kanellakis, and G. Nikolakopou- los, “Geometry aware NMPC scheme for morphing quadrotor naviga- tion in restricted entrances,” inProc. European Control Conf. (ECC), 2021, pp. 1597–1603, doi: 10.23919/ECC54610.2021.9655205
-
[18]
Real-time obstacle avoidance for manipulators and mobile robots,
O. Khatib, “Real-time obstacle avoidance for manipulators and mobile robots,” The International Journal of Robotics Research, vol. 5, no. 1, pp. 90–98, 1986
work page 1986
-
[19]
Y . Koren and J. Borenstein, ”Potential field methods and their inherent limitations for mobile robot navigation,” in Proceedings. 1991 IEEE International Conference on Robotics and Automation, Sacramento, CA, USA, 1991, pp. 1398-1404, doi: 10.1109/ROBOT.1991.131754
-
[20]
Local obstacle avoidance for mobile robots based on the method of artificial potentials,
R. B. Tilove, “Local obstacle avoidance for mobile robots based on the method of artificial potentials,” in Proc. IEEE Int. Conf. Robot. Autom. (ICRA), 1990, pp. 566–571
work page 1990
-
[21]
UA V obstacle avoidance algorithm based on model predictive control and control barrier functions,
D. Wang, L. Mu, B. Wang, Q. Li, and X. Xue, “UA V obstacle avoidance algorithm based on model predictive control and control barrier functions,” IFAC-PapersOnLine, vol. 59, no. 20, pp. 405–410, 2025
work page 2025
-
[22]
MPC-based linear equivalence with control barrier functions for VTOL-UA Vs,
A. M. Ali, H. A. Hashim, and C. Shen, “MPC-based linear equivalence with control barrier functions for VTOL-UA Vs,” in Proc. American Control Conf. (ACC), 2024
work page 2024
-
[23]
acados: A modular open-source framework for fast embedded optimal control,
R. Verschueren, M. Zanon, R. Quirynen, and M. Diehl, “acados: A modular open-source framework for fast embedded optimal control,” Mathematical Programming Computation, vol. 14, pp. 147–183, 2022
work page 2022
-
[24]
Batch informed trees (BIT*): Informed asymptotically optimal anytime search,
J. D. Gammell, T. D. Barfoot, and S. S. Srinivasa, “Batch informed trees (BIT*): Informed asymptotically optimal anytime search,”Int. J. Robot. Res., vol. 39, no. 5, pp. 543–567, 2020
work page 2020
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.