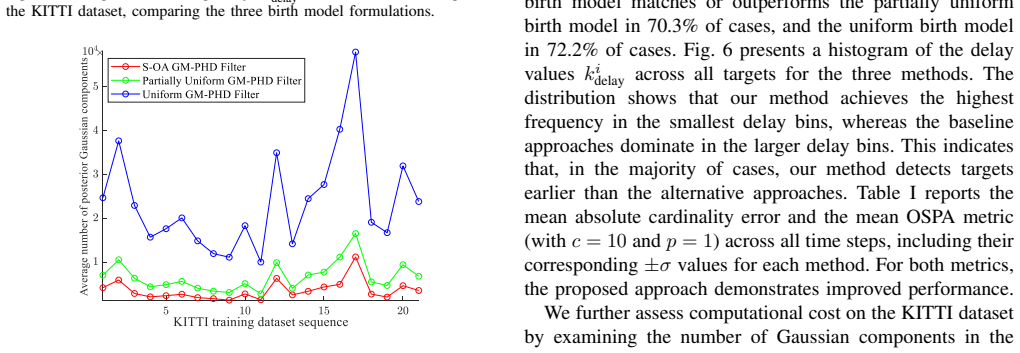
A Semantic and Occlusion-Aware GM-PHD Filter
Pith reviewed 2026-05-21 05:03 UTC · model grok-4.3
The pith
A semantic occlusion-aware birth model lets a GM-PHD filter initiate tracks faster by predicting likely locations of new objects from image semantics and hidden regions.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By defining the birth intensity through explicit occlusion maps and semantic class probabilities extracted from images, the Semantic-Occlusion Aware birth model supplies the GM-PHD filter with initialization terms that better match the actual spatial distribution of new targets, thereby shortening the delay between an object's first appearance and its incorporation into the multi-object state estimate.
What carries the argument
The Semantic-Occlusion Aware (S-OA) birth model, which computes per-pixel birth probabilities from semantic labels and an occlusion mask derived from the same image segmentation.
If this is right
- Track initiation latency drops in scenes with heavy occlusion compared with uniform or distance-only birth models.
- Mean absolute cardinality error and OSPA distance improve or stay equal in roughly 70 percent of evaluated sequences.
- The filter can be tuned by adjusting birth-model weights that trade off semantic priors against measurement-driven births.
Where Pith is reading between the lines
- The same occlusion-aware birth construction could be ported to other random-finite-set filters that already accept external maps or labels.
- In real-time autonomous driving stacks, the approach would reward investment in segmentation networks that are robust to motion blur and changing illumination.
- A natural next measurement would be to replace the static semantic prior with a short-term motion forecast of occluded regions to anticipate objects about to emerge.
Load-bearing premise
The deep-learning semantic segmentation is accurate enough to correctly label both object classes and the locations of occlusions in the camera images.
What would settle it
Run the filter once with ground-truth semantic labels and occlusion masks and once with the network's predicted labels; a large drop in track-initiation latency only when using the network output would confirm that semantic accuracy is necessary for the claimed gains.
Figures







read the original abstract
This paper proposes a new birth model including semantic information derived from deep learning to create an occlusion-aware Gaussian Mixture Probability Hypothesis Density (GM-PHD) filter. Unlike prior approaches that rely on simplistic or uniform assumptions, the proposed Semantic-Occlusion Aware (S-OA) birth model defines initialization terms by explicitly considering regions of occlusion and by leveraging semantic information about the environment. This enables the filter to accurately represent where new objects are more likely to appear, thereby improving tracking performance in complex and high-density driving scenarios. The method is evaluated through Monte Carlo simulations and experiments on the KITTI dataset. Performance is assessed by measuring the latency between first detection and track initiation, along with the mean absolute cardinality error and the Optimal Subpattern Assignment (OSPA) metric. Results demonstrate that the S-OA birth model reduces initialization delay in occlusion-heavy settings, matching or outperforming the strongest baseline in approximately 70% of cases. A sensitivity analysis of birth model weights is also provided. Overall, the findings underscore the benefits of integrating occlusion reasoning and semantic priors into Bayesian tracking frameworks for autonomous driving.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. This paper proposes a Semantic-Occlusion Aware (S-OA) birth model for the Gaussian Mixture Probability Hypothesis Density (GM-PHD) filter. The model incorporates semantic class probabilities and occlusion regions from deep learning segmentation to define birth intensities, aiming to improve track initialization in occluded, high-density driving scenes. Evaluation uses Monte Carlo simulations and KITTI sequences, reporting gains in track initiation latency, mean absolute cardinality error, and OSPA metric, with a sensitivity analysis on birth model weights.
Significance. If the central claims hold after addressing robustness concerns, the work would offer a concrete way to inject semantic and geometric priors into Bayesian multi-object tracking, which is relevant for autonomous driving perception pipelines. The explicit use of occlusion maps to shape the birth intensity is a clear advance over uniform or detection-only birth models, and the provision of a weight sensitivity study is a strength.
major comments (2)
- [Birth model and experiments] Birth model derivation (likely §3–4): the S-OA intensity is constructed by directly mapping semantic probabilities and detected occlusion regions into the Gaussian mixture birth terms, yet no error-propagation analysis or ablation with perturbed segmentation labels (e.g., reduced mIoU) is provided. This assumption is load-bearing for attributing the reported latency and OSPA reductions to the proposed model rather than to the base GM-PHD or sensor model.
- [Experiments] Evaluation sections (Monte Carlo and KITTI results): quantitative results are presented without error bars, exact baseline implementations, or data exclusion criteria. This weakens the claim that the S-OA model matches or outperforms the strongest baseline in ~70% of cases, as statistical reliability cannot be assessed from the given numbers.
minor comments (2)
- [Abstract and §5] The abstract states performance is assessed by latency, cardinality error, and OSPA, but the manuscript should explicitly define the OSPA cutoff and order parameters used in all reported tables.
- [Figures] Figure captions for the KITTI qualitative results should indicate which frames contain heavy occlusion so readers can directly link visual evidence to the quantitative gains.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. We address the major comments point by point below. Revisions have been made to strengthen the robustness analysis and experimental reporting.
read point-by-point responses
-
Referee: [Birth model and experiments] Birth model derivation (likely §3–4): the S-OA intensity is constructed by directly mapping semantic probabilities and detected occlusion regions into the Gaussian mixture birth terms, yet no error-propagation analysis or ablation with perturbed segmentation labels (e.g., reduced mIoU) is provided. This assumption is load-bearing for attributing the reported latency and OSPA reductions to the proposed model rather than to the base GM-PHD or sensor model.
Authors: We agree that demonstrating robustness to segmentation errors would strengthen attribution of the observed improvements to the S-OA birth model. In the revised manuscript we will add an ablation study that perturbs the input semantic labels and occlusion maps at varying mIoU levels and reports the resulting changes in track-initiation latency, cardinality error, and OSPA. This will be placed in a new subsection of the experiments. revision: yes
-
Referee: [Experiments] Evaluation sections (Monte Carlo and KITTI results): quantitative results are presented without error bars, exact baseline implementations, or data exclusion criteria. This weakens the claim that the S-OA model matches or outperforms the strongest baseline in ~70% of cases, as statistical reliability cannot be assessed from the given numbers.
Authors: We accept that the current presentation lacks statistical detail and implementation transparency. The revised manuscript will include error bars (standard deviation across Monte Carlo runs) for all metrics, a table or appendix entry specifying the exact baseline parameter settings and code references, and an explicit statement of the sequence-selection and frame-exclusion criteria used for the KITTI evaluation. revision: yes
Circularity Check
No significant circularity; derivation self-contained against external benchmarks
full rationale
The paper defines a new Semantic-Occlusion Aware birth model for the GM-PHD filter by incorporating semantic segmentation outputs and occlusion regions into the intensity function. Performance claims are supported by Monte Carlo simulations and evaluation on the external KITTI dataset using standard metrics (OSPA, cardinality error, track initiation latency). No equations reduce the reported gains to quantities defined by fitted parameters or self-referential constructions. The central model is presented as an extension with independent content, and results are not forced by internal definitions or unverified self-citation chains.
Axiom & Free-Parameter Ledger
free parameters (1)
- birth model weights
axioms (1)
- domain assumption Deep learning semantic segmentation provides reliable object class and occlusion region labels in driving scenes.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
The birth intensity ... is defined adaptively by integrating geometric occlusion reasoning and semantic priors ... γ_occl,k(xk) ... γ_sem,k(xk) ... γ_fov,k(xk) ... γk(xk) = γ_occl,k + γ_sem,k + γ_fov,k
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We adopt the GM-PHD filter ... performance assessed by ... OSPA metric ... Monte Carlo simulations and KITTI experiments
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Efficient Unbiased Tracking of Multiple Dynamic Obstacles Under Large Viewpoint Changes,
I. Miller, M. Campbell and D. Huttenlocher, “Efficient Unbiased Tracking of Multiple Dynamic Obstacles Under Large Viewpoint Changes,” in IEEE Transactions on Robotics, vol. 27, no. 1, pp. 29-46, Feb. 2011
work page 2011
-
[2]
Negative Information for Occlusion Reasoning in Dynamic Extended Multiobject Tracking,
K. Wyffels and M. Campbell, “Negative Information for Occlusion Reasoning in Dynamic Extended Multiobject Tracking,” in IEEE Transactions on Robotics, vol. 31, no. 2, pp. 425-442, April 2015
work page 2015
-
[3]
The probabilistic data association filter,
Y . Bar-Shalom, F. Daum and J. Huang, “The probabilistic data association filter,” in IEEE Control Systems Magazine, vol. 29, no. 6, pp. 82-100, Dec. 2009
work page 2009
-
[4]
Multiple hypothesis tracking for multiple target tracking,
S. S. Blackman, “Multiple hypothesis tracking for multiple target tracking,” in IEEE Aerospace and Electronic Systems Magazine, vol. 19, no. 1, pp. 5-18, Jan. 2004
work page 2004
-
[5]
I. R. Goodman, R. P. S. Mahler, and H. T. Nguyen, “Mathematics of Data Fusion,” Springer Netherlands, 1997
work page 1997
-
[6]
Multitarget Bayes filtering via first-order multitarget moments,
R. P. S. Mahler, “Multitarget Bayes filtering via first-order multitarget moments,” in IEEE Transactions on Aerospace and Electronic Sys- tems, vol. 39, no. 4, pp. 1152-1178, Oct. 2003
work page 2003
-
[7]
A PHD Filter Based Localization System for Robotic Swarms,
R. A. Thivanka Perera, C. Yuan, and P. Stegagno, “A PHD Filter Based Localization System for Robotic Swarms,” Springer Proceedings in Advanced Robotics. Springer International Publishing, pp. 176–189, 2022
work page 2022
-
[8]
A GM- PHD Filter with Estimation of Probability of Detection and Survival for Individual Targets,
R. A. T. Perera, M. Jeong, A. Q. Li and P. Stegagno, “A GM- PHD Filter with Estimation of Probability of Detection and Survival for Individual Targets,” 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Detroit, MI, USA, 2023
work page 2023
-
[9]
Y .-C. Sun and I. Hwang, “Gaussian mixture probability hypothesis density filter with dynamic probabilities: Application to road traffic surveillance,” European Journal of Control, vol. 69, p. 100761, Jan. 2023
work page 2023
-
[10]
The Gaussian Mixture Probability Hypothesis Density Filter,
B. . -N. V o and W. . -K. Ma, “The Gaussian Mixture Probability Hypothesis Density Filter,” in IEEE Transactions on Signal Processing, vol. 54, no. 11, pp. 4091-4104, Nov. 2006
work page 2006
-
[11]
A Partially Uni- form Target Birth Model for Gaussian Mixture PHD/CPHD Filtering,
M. Beard, B. T. V o, B. -N. V o and S. Arulampalam, “A Partially Uni- form Target Birth Model for Gaussian Mixture PHD/CPHD Filtering,” in IEEE Transactions on Aerospace and Electronic Systems, vol. 49, no. 4, pp. 2835-2844, Oct. 2013
work page 2013
-
[12]
Adaptive Target Birth Intensity for PHD and CPHD Filters,
B. Ristic, D. Clark, B. -N. V o and B. -T. V o, “Adaptive Target Birth Intensity for PHD and CPHD Filters,” in IEEE Transactions on Aerospace and Electronic Systems, vol. 48, no. 2, pp. 1656-1668, April 2012
work page 2012
-
[13]
PHD filter with diffuse spatial prior on the birth process with applications to GM-PHD filter,
J. Houssineau and D. Laneuville, “PHD filter with diffuse spatial prior on the birth process with applications to GM-PHD filter,” 2010 13th International Conference on Information Fusion, Edinburgh, UK, 2010, pp. 1-8
work page 2010
-
[14]
Multi-class Target Tracking Using the Seman- tic PHD Filter,
J. Chen and P. Dames, “Multi-class Target Tracking Using the Seman- tic PHD Filter,” Springer Proceedings in Advanced Robotics. Springer International Publishing, pp. 526–541, 2022
work page 2022
-
[15]
The semantic PHD filter for multi-class target tracking: From theory to practice,
J. Chen, Z. Xie, and P. Dames, “The semantic PHD filter for multi-class target tracking: From theory to practice,” Robotics and Autonomous Systems, vol. 149, p. 103947, Mar. 2022
work page 2022
-
[16]
Sequential monte carlo imple- mentation of the phd filter for multi-target tracking,
Ba-Ngu V o, S. Singh and A. Doucet, “Sequential monte carlo imple- mentation of the phd filter for multi-target tracking,” Sixth Interna- tional Conference of Information Fusion, 2003. Proceedings of the, Cairns, QLD, Australia, 2003, pp. 792-799
work page 2003
-
[17]
Pseudo-LiDAR++: Accurate Depth for 3D Object Detection in Autonomous Driving,
Y . You, et al., “Pseudo-LiDAR++: Accurate Depth for 3D Object Detection in Autonomous Driving,” in International Conference on Learning Representations, 2020
work page 2020
-
[18]
Are we ready for autonomous driving? The KITTI vision benchmark suite,
A. Geiger, P. Lenz and R. Urtasun, “Are we ready for autonomous driving? The KITTI vision benchmark suite,” 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 2012, pp. 3354-3361
work page 2012
-
[19]
PV-RCNN: Point-V oxel Feature Set Abstraction for 3D Object Detection,
S. Shi, et al., “PV-RCNN: Point-V oxel Feature Set Abstraction for 3D Object Detection,” 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, W A, USA, 2020, pp. 10526- 10535
work page 2020
-
[20]
Cylindrical and Asymmetrical 3D Convolution Net- works for LiDAR Segmentation,
Zhu, X., et al., “Cylindrical and Asymmetrical 3D Convolution Net- works for LiDAR Segmentation,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2021, pp. 9939-9948
work page 2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.