UAV-based Energy-Efficient Data Collection in Smart Grids with ISAC QoS Guarantees
Pith reviewed 2026-05-22 03:40 UTC · model grok-4.3
The pith
UAVs with integrated sensing and communication reduce energy for smart grid data collection by up to 34.6 percent
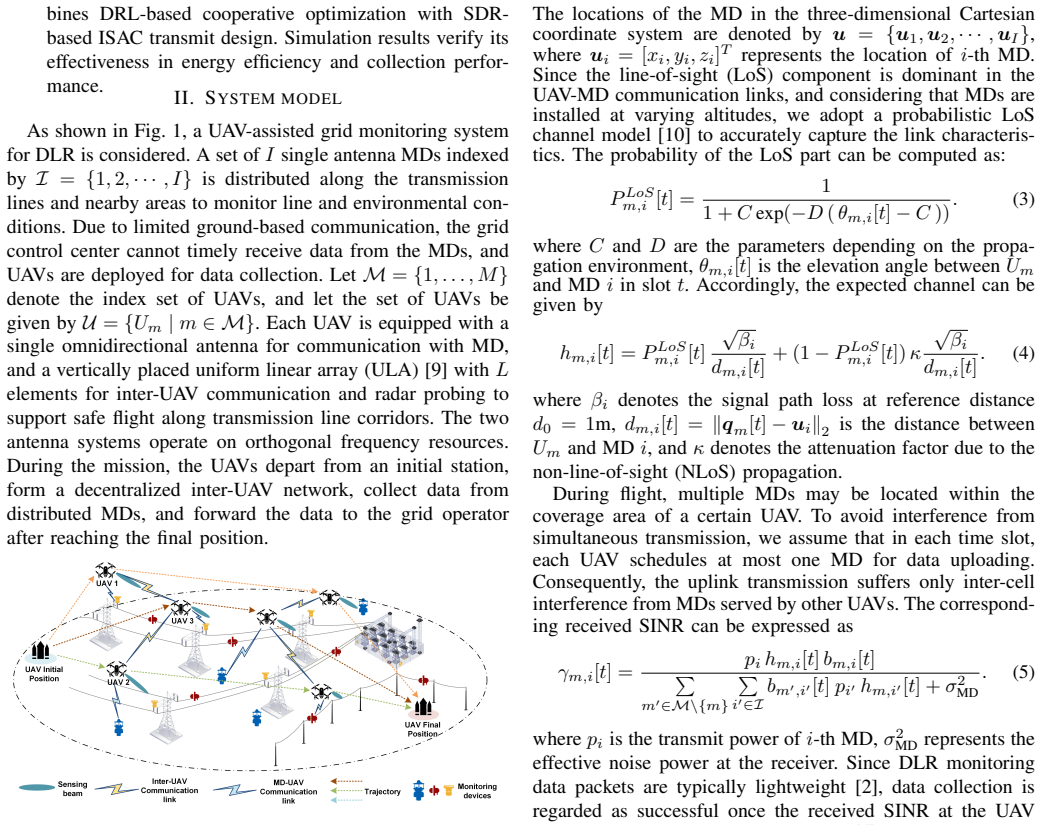
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central discovery is that the joint energy minimization problem for UAV trajectories and collection scheduling under ISAC constraints can be solved effectively by a hybrid deep reinforcement learning and semidefinite relaxation algorithm, leading to lower energy consumption while satisfying the required quality of service for safe and timely dynamic line rating updates.
What carries the argument
Hybrid algorithm combining deep reinforcement learning for optimizing UAV trajectories and collection scheduling with semidefinite relaxation to manage non-convex ISAC quality of service constraints
If this is right
- The proposed scheme reduces energy consumption by up to 34.6% compared with offline benchmarks.
- The proposed scheme reduces energy consumption by about 2.2% compared with the separated sensing-and-communication baseline.
- The scheme satisfies the minute-level timescale requirement of DLR.
- ISAC QoS guarantees are maintained for cooperative UAV data collection.
Where Pith is reading between the lines
- The framework could be applied to other UAV-based monitoring tasks in infrastructure where both sensing the environment and communicating data are necessary.
- Real-world deployment would require accounting for unpredictable factors like wind that affect actual energy use beyond the simulations.
- Joint design of sensing and communication may become standard for energy-limited aerial systems in time-sensitive applications.
Load-bearing premise
Semidefinite relaxation adequately solves the non-convex ISAC QoS constraints without causing performance loss or safety violations in the energy minimization problem.
What would settle it
Flight experiments demonstrating that the optimized trajectories violate the ISAC quality requirements or fail to collect data within the required minute timescale.
Figures



read the original abstract
Dynamic line rating (DLR) is a methodology that requires timely monitoring data to determine the real-time ampacity of power lines. However, DLR monitoring devices (MD) are vulnerable to connectivity disruptions, leading to missing or delayed data. Although unmanned aerial vehicles (UAV) can enable resilient data collection from MD, their limited onboard energy challenges timely monitoring over extended transmission corridors with flight hazards. This paper proposes a cooperative UAV-based data collection framework with integrated sensing and communication (ISAC) to support timely DLR updates. In this framework, ISAC is employed to maintain the sensing and communication quality required for safe and cooperative UAV data collection. Accordingly, a joint energy minimization problem is formulated over UAV trajectories and collection scheduling under ISAC constraints. To solve it, a hybrid algorithm combining deep reinforcement learning (DRL) and semidefinite relaxation (SDR) is proposed, where DRL optimizes the trajectory and collection scheduling, while SDR is used to handle the non-convex ISAC constraints. Simulation results show that the proposed scheme reduces energy consumption by up to 34.6% compared with offline benchmarks and by about 2.2% compared with the separated sensing-and-communication baseline, while satisfying the minute-level timescale requirement of DLR.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a cooperative UAV-based data collection framework for dynamic line rating (DLR) in smart grids that employs integrated sensing and communication (ISAC) to enforce QoS for safe operation. It formulates a joint energy-minimization problem over UAV trajectories and collection scheduling subject to ISAC constraints, and solves it with a hybrid algorithm that uses deep reinforcement learning (DRL) for trajectory and scheduling decisions while applying semidefinite relaxation (SDR) to the non-convex ISAC QoS terms. Simulation results are reported to show energy reductions of up to 34.6% relative to offline benchmarks and 2.2% relative to a separated sensing-and-communication baseline, while satisfying the minute-level DLR timescale.
Significance. If the simulation results prove reliable, the work contributes a practical joint-optimization approach that combines DRL trajectory planning with SDR-based constraint handling for energy-efficient UAV data collection under ISAC QoS guarantees. The hybrid solver and the explicit comparison against both offline and separated baselines are positive elements; however, the overall significance remains moderate because the central claims rest entirely on simulation outcomes without reported real-world validation, error bars, or sensitivity checks against modeling assumptions.
major comments (2)
- [hybrid algorithm description] The hybrid DRL+SDR algorithm (described in the optimization and solution sections) applies semidefinite relaxation to the non-convex ISAC QoS constraints, yet provides no analysis of solution rank (e.g., whether the obtained covariance matrices are rank-1), randomization gap, or post-processing feasibility rate. Because the headline energy-reduction figures (34.6% and 2.2%) and the QoS-satisfaction claim are obtained from this solver, the absence of tightness verification directly affects the validity of both the safety guarantees and the performance comparisons.
- [simulation results] The simulation results that underpin the energy savings and DLR timescale compliance are presented without details on Monte-Carlo repetitions, confidence intervals, or sensitivity to key modeling parameters (channel models, UAV energy consumption coefficients, or ISAC QoS thresholds). This weakens the support for the central claim that the proposed scheme simultaneously reduces energy and meets minute-level requirements.
minor comments (2)
- Notation for the ISAC QoS constraints and the DRL state-action space could be clarified with an explicit table of symbols to improve readability.
- [abstract] The abstract states the energy reductions but does not mention the number of Monte-Carlo trials or the specific simulation parameters used to obtain the 34.6% and 2.2% figures.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on our manuscript. We have prepared point-by-point responses to the major concerns and will revise the paper to incorporate additional analysis and details as outlined below.
read point-by-point responses
-
Referee: The hybrid DRL+SDR algorithm (described in the optimization and solution sections) applies semidefinite relaxation to the non-convex ISAC QoS constraints, yet provides no analysis of solution rank (e.g., whether the obtained covariance matrices are rank-1), randomization gap, or post-processing feasibility rate. Because the headline energy-reduction figures (34.6% and 2.2%) and the QoS-satisfaction claim are obtained from this solver, the absence of tightness verification directly affects the validity of both the safety guarantees and the performance comparisons.
Authors: We acknowledge that the manuscript does not include an explicit analysis of SDR solution rank, randomization gap, or post-processing feasibility. To address this gap and strengthen the support for the QoS guarantees and performance claims, we will add a dedicated discussion in the revised solution section. This will report the empirical rank distribution of the covariance matrices obtained from the SDR step, the frequency with which rank-1 solutions occur, and the feasibility rate after randomization, based on the same simulation conditions used for the reported results. revision: yes
-
Referee: The simulation results that underpin the energy savings and DLR timescale compliance are presented without details on Monte-Carlo repetitions, confidence intervals, or sensitivity to key modeling parameters (channel models, UAV energy consumption coefficients, or ISAC QoS thresholds). This weakens the support for the central claim that the proposed scheme simultaneously reduces energy and meets minute-level requirements.
Authors: We agree that the simulation section would benefit from greater statistical rigor. The current manuscript presents aggregate performance figures without specifying the number of Monte-Carlo repetitions, variability measures, or sensitivity checks. In the revised manuscript we will expand the simulation results section to include the number of independent runs, confidence intervals or standard deviations for the key metrics (energy consumption and QoS satisfaction), and sensitivity plots or tables with respect to channel models, UAV energy coefficients, and ISAC QoS thresholds. revision: yes
Circularity Check
No significant circularity in formulation or solver chain
full rationale
The paper formulates a standard joint energy-minimization problem over UAV trajectories and scheduling subject to ISAC QoS constraints, then applies a hybrid DRL-plus-SDR solver. DRL handles the trajectory/scheduling decisions while SDR relaxes the non-convex QoS terms; both are external, well-established techniques whose correctness does not depend on any parameter fitted inside this work or on a self-citation chain. The reported energy reductions are obtained from simulation comparisons against independent benchmarks and baselines, not from any quantity that is defined in terms of itself or statistically forced by an internal fit. The derivation therefore remains self-contained against external methods and empirical validation.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption ISAC QoS constraints admit effective semidefinite relaxation for tractable solving
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
a hybrid algorithm combining deep reinforcement learning (DRL) and semidefinite relaxation (SDR) is proposed, where DRL optimizes the trajectory and collection scheduling, while SDR is used to handle the non-convex ISAC constraints
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Simulation results show that the proposed scheme reduces energy consumption by up to 34.6% ... while satisfying the minute-level timescale requirement of DLR
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Dynamic thermal rating of transmission lines: A review,
S. Karimi, P. Musilek, and A. M. Knight, “Dynamic thermal rating of transmission lines: A review,”Renewable and Sustainable Energy Reviews, vol. 91, pp. 600–612, 2018
work page 2018
-
[2]
Time-aware monitoring of overhead transmission line sag and temperature with lora communication,
M. Wydra, P. Kubaczynski, K. Mazur, and B. Ksiezopolski, “Time-aware monitoring of overhead transmission line sag and temperature with lora communication,”Energies, vol. 12, no. 3, p. 505, 2019
work page 2019
-
[3]
Cooperative data collection with multiple uavs for information freshness in the internet of things,
X. Wang, M. Yi, J. Liu, Y . Zhang, M. Wang, and B. Bai, “Cooperative data collection with multiple uavs for information freshness in the internet of things,”IEEE Transactions on Communications, vol. 71, no. 5, pp. 2740–2755, 2023
work page 2023
-
[4]
K. He, Q. Zhou, Z. Lian, Y . Shen, J. Gao, and Z. Shuai, “Spatiotemporal precise routing strategy for multi-uav-based power line inspection with integrated satellite-terrestrial network,”IEEE Transactions on Industry Applications, vol. 60, no. 6, pp. 8418–8429, 2024
work page 2024
-
[5]
D. Poli, P. Pelacchi, G. Lutzemberger, T. B. Scirocco, F. Bassi, and G. Bruno, “The possible impact of weather uncertainty on the dynamic thermal rating of transmission power lines: A monte carlo error-based approach,”Electric Power Systems Research, vol. 170, pp. 338–347, 2019
work page 2019
-
[6]
R. Dianovsk `y, P. Pecho, P. Vel’k `y, and M. Hr ´uz, “Electromagnetic radiation from high-voltage transmission lines: Impact on uav flight safety and performance,”Transportation research procedia, vol. 75, pp. 209–218, 2023
work page 2023
-
[7]
Survey and evaluation of sensors for overhead cable detection using uavs,
N. H. Malle, F. F. Nyboe, and E. Ebeid, “Survey and evaluation of sensors for overhead cable detection using uavs,” in2021 International Conference on Unmanned Aircraft Systems (ICUAS). IEEE, 2021, pp. 361–370
work page 2021
-
[8]
Y . Liu, W. Mao, B. He, W. Huangfu, T. Huang, H. Zhang, and K. Long, “Radar probing optimization for joint beamforming and uav trajectory design in uav-enabled integrated sensing and communication,”IEEE Transactions on Communications, vol. 73, no. 6, pp. 4469–4485, 2025
work page 2025
-
[9]
Networked isac for low-altitude economy: Coordinated transmit beamforming and uav trajectory design,
G. Cheng, X. Song, Z. Lyu, and J. Xu, “Networked isac for low-altitude economy: Coordinated transmit beamforming and uav trajectory design,” IEEE Transactions on Communications, vol. 73, no. 8, pp. 5832–5847, 2025
work page 2025
-
[10]
Energy minimization for wireless communication with rotary-wing uav,
Y . Zeng, J. Xu, and R. Zhang, “Energy minimization for wireless communication with rotary-wing uav,”IEEE Transactions on Wireless Communications, vol. 18, no. 4, pp. 2329–2345, 2019
work page 2019
-
[11]
Isac enabled cooperative detection for cellular-connected uav network,
Y . Wang, K. Zu, L. Xiang, Q. Zhang, Z. Feng, J. Hu, and K. Yang, “Isac enabled cooperative detection for cellular-connected uav network,”IEEE Transactions on Wireless Communications, vol. 24, no. 2, pp. 1541– 1554, 2025
work page 2025
-
[12]
Uav trajectory optimization for spectrum cartography: A ppo approach,
L. Li, W. Li, J. Wang, X. Chen, Q. Peng, and W. Huang, “Uav trajectory optimization for spectrum cartography: A ppo approach,” IEEE Communications Letters, vol. 27, no. 6, pp. 1575–1579, 2023
work page 2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.