Safety by Invariance, Liveness through Refinement: Heterogeneous Contract Framework for Co-Design of Layered Control
Pith reviewed 2026-05-08 18:22 UTC · model grok-4.3
The pith
A heterogeneous contract framework enforces safety by invariance at the continuous layer and liveness by refinement at the discrete layer for layered control.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
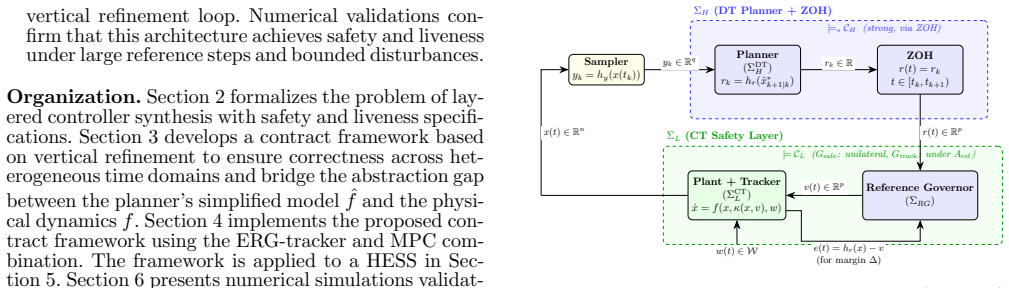
Safety is enforced by invariance at the continuous-time layer, while liveness is achieved through refinement at the discrete-time layer, with inter-layer coordination formalized via vertical refinement and timing-compatibility conditions. This contract is instantiated by combining an MPC planner, an input-to-state stabilizing low-level controller, and a reference-governor bridge, and is validated on a Hybrid Energy Storage System comprising a battery and a supercapacitor.
What carries the argument
the heterogeneous assume-guarantee contract framework, which decomposes safety via continuous-time invariance from liveness via discrete-time refinement and coordinates layers via vertical refinement and timing-compatibility conditions
If this is right
- A uniform specification language applies across discrete planning and continuous execution.
- Formal guarantees are preserved when interconnecting subsystems operating at heterogeneous time scales.
- Compositional separation between layers is achieved without reliance on naive input-filtering laws.
- The framework supports co-design of an MPC planner with an input-to-state stabilizing controller and reference-governor bridge.
- The instantiated controller satisfies both safety and liveness on a hybrid energy storage system with battery and supercapacitor.
Where Pith is reading between the lines
- Designers could attach new discrete planners to existing continuous safe controllers while retaining prior safety proofs if the refinement conditions hold.
- The timing-compatibility rules might be verified through simulation for applications such as vehicle path planning with actuator dynamics.
- If the conditions are met, the method could reduce the need for overly conservative safety buffers that limit performance in energy or motion systems.
Load-bearing premise
The vertical refinement and timing-compatibility conditions can be satisfied when interconnecting the MPC planner, ISS low-level controller, and reference-governor bridge without introducing new safety violations or performance loss.
What would settle it
A concrete counterexample in which a system satisfying the invariance, refinement, vertical refinement, and timing-compatibility conditions still violates a continuous-time safety constraint or fails to achieve a discrete liveness objective.
Figures






read the original abstract
Real-world control systems must achieve long-horizon objectives (liveness) while respecting continuous-time safety constraints, a combination that motivates hierarchical layered control architectures (LCAs). Existing LCA research, however, lacks (i) a uniform specification language across discrete planning and continuous execution, (ii) formal guarantees that specifications are preserved when interconnecting subsystems at heterogeneous time scales, and (iii) compositional separation between layers, owing to reliance on naive input-filtering laws. This paper addresses all three gaps by importing the safety--liveness decomposition into a heterogeneous assume--guarantee framework: \emph{safety is enforced by invariance} at the continuous-time layer, while \emph{liveness is achieved through refinement} at the discrete-time layer, with inter-layer coordination formalized via vertical refinement and timing-compatibility conditions. We instantiate this contract with a novel LCA combining an MPC planner, an input-to-state stabilizing (ISS) low-level controller, and a reference-governor bridge, and validate it on a Hybrid Energy Storage System (HESS) comprising a battery and a supercapacitor.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a heterogeneous assume-guarantee contract framework for layered control architectures (LCAs). Safety is enforced by invariance at the continuous-time layer while liveness is achieved through refinement at the discrete-time layer, with inter-layer coordination formalized via vertical refinement and timing-compatibility conditions. The framework is instantiated with an MPC planner, an input-to-state stabilizing (ISS) low-level controller, and a reference-governor bridge, and validated on a hybrid energy storage system (HESS) comprising a battery and supercapacitor.
Significance. If the vertical refinement and timing-compatibility conditions hold for the instantiation, the work would advance the field by supplying a uniform specification language and compositional guarantees for safety-liveness decomposition across heterogeneous time scales in LCAs. The explicit separation of concerns, the concrete MPC-ISS-governor architecture, and the HESS case study address documented gaps in existing layered control research and could support modular co-design in safety-critical applications.
major comments (1)
- The central claim requires that the assume-guarantee contracts compose via vertical refinement and timing-compatibility conditions so that continuous-time invariance (safety) is preserved under discrete-time refinement (liveness) for the MPC + ISS + reference-governor instantiation. However, no explicit computation of the composed invariant or verification that the governor's filtering law transmits the invariance set without shrinkage (while satisfying the ISS gain and MPC horizon timing) is supplied for the reported HESS dynamics; this is load-bearing for the safety guarantee.
Simulated Author's Rebuttal
We thank the referee for the positive assessment of the work's significance and for the constructive major comment. We address it directly below and will revise the manuscript to strengthen the explicit safety verification.
read point-by-point responses
-
Referee: The central claim requires that the assume-guarantee contracts compose via vertical refinement and timing-compatibility conditions so that continuous-time invariance (safety) is preserved under discrete-time refinement (liveness) for the MPC + ISS + reference-governor instantiation. However, no explicit computation of the composed invariant or verification that the governor's filtering law transmits the invariance set without shrinkage (while satisfying the ISS gain and MPC horizon timing) is supplied for the reported HESS dynamics; this is load-bearing for the safety guarantee.
Authors: We agree that an explicit computation of the composed invariant for the HESS dynamics, together with verification that the reference governor's filtering law transmits the invariance set without shrinkage while respecting the ISS gain and MPC horizon timing, would make the safety guarantee fully concrete and load-bearing. The manuscript derives the general vertical refinement and timing-compatibility conditions that guarantee invariance preservation by construction for any system satisfying the MPC-ISS-governor assumptions, and it proves these conditions hold abstractly for the architecture. The HESS example demonstrates the overall layered control realization but does not include the numerical invariant computation or governor-specific verification for the reported battery-supercapacitor dynamics. In the revised manuscript we will add this computation, explicitly constructing the invariant set for the HESS model and confirming transmission without shrinkage under the chosen ISS gain and MPC timing parameters. revision: yes
Circularity Check
Standard safety-liveness decomposition imported into heterogeneous contracts with independent coordination conditions
full rationale
The derivation imports the known safety-by-invariance / liveness-by-refinement split and assume-guarantee contracts, then adds vertical refinement and timing-compatibility conditions defined directly in the paper. No equation reduces to a fitted parameter renamed as a prediction, no self-definition of the target result, and no load-bearing uniqueness theorem imported solely from the authors' prior work. The central claim (composition preserves invariance and refinement for the MPC+ISS+governor instantiation) is an application rather than a tautology; any self-citations are non-load-bearing background. This yields a normal low circularity score.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Safety can be enforced by set invariance in continuous-time dynamical systems
- domain assumption Liveness properties can be achieved through successive refinement in discrete-time planning layers
invented entities (1)
-
Reference-governor bridge
no independent evidence
Lean theorems connected to this paper
-
Foundation/ArrowOfTime, Cost.FunctionalEquationNo parallel — quadratic Lyapunov / linear ISS, not the cosh-cost J(x) = ½(x+x⁻¹)−1 forced by washburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
ISS-Lyapunov function V(e)=e^T P e ... ¯V_h(H_max) := ᾱ(α^{-1}(σ(H_max)))
-
Constants (zero-parameter ladder)Tunable design parameters, antithetical to RS's parameter-free derivation of c, ℏ, G as φ-powers unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
controller gains k₁ = 25 s⁻², k₂ = 11 s¹ ... Q = diag(50,1) ... sampling period Tₛ
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.