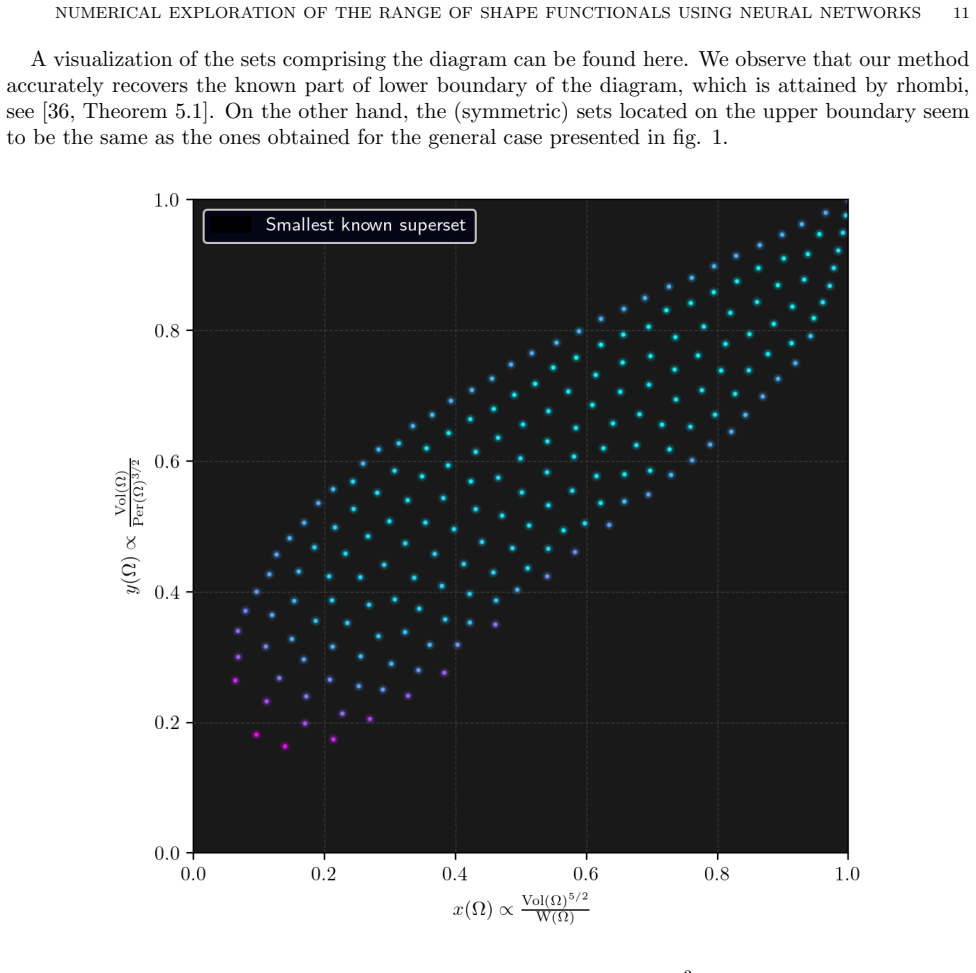
Numerical exploration of the range of shape functionals using neural networks
Pith reviewed 2026-05-15 21:50 UTC · model grok-4.3
The pith
Invertible neural networks based on gauge functions parametrize convex bodies to numerically chart the attainable ranges of their shape functionals.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
We introduce a parametrization of convex bodies in arbitrary dimensions using a specific invertible neural network architecture based on gauge functions, allowing an intrinsic conservation of the convexity of the sets during the shape optimization process. To achieve a uniform sampling inside the diagram, we introduce an interacting particle system that minimizes a Riesz energy functional via automatic differentiation. The effectiveness of the method is demonstrated on several diagrams involving both geometric and PDE-type functionals for convex bodies of R^2 and R^3.
What carries the argument
Invertible neural network architecture based on gauge functions that parametrizes convex bodies while preserving convexity intrinsically.
If this is right
- Diagrams for volume versus perimeter, moment of inertia versus torsional rigidity, and first Neumann eigenvalue versus Willmore energy become computable in both two and three dimensions.
- The same framework applies equally to purely geometric functionals and to functionals that involve solutions of PDEs on the body.
- Uniform sampling via the particle system yields a dense description of the boundary and interior of each diagram without manual tuning of test functions.
Where Pith is reading between the lines
- The method could be used to test conjectured inequalities between functionals by checking whether sampled points violate them.
- Because the representation works in arbitrary dimension, the same code could produce diagrams in four or higher dimensions once computational resources allow.
- Replacing the Riesz energy with a different interaction potential might improve sampling near diagram boundaries where extrema are expected.
Load-bearing premise
The chosen neural-network architecture based on gauge functions is expressive enough to represent all convex bodies densely enough for the sampled diagrams to reflect the true attainable ranges.
What would settle it
A known convex body whose functional values lie outside the numerically sampled region or cannot be closely approximated by any output of the network would show that the parametrization misses part of the space.
Figures







read the original abstract
We introduce a novel numerical framework for the exploration of Blaschke--Santal\'o diagrams, which are efficient tools characterizing the possible inequalities relating some given shape functionals. We introduce a parametrization of convex bodies in arbitrary dimensions using a specific invertible neural network architecture based on gauge functions, allowing an intrinsic conservation of the convexity of the sets during the shape optimization process. To achieve a uniform sampling inside the diagram, and thus a satisfying description of it, we introduce an interacting particle system that minimizes a Riesz energy functional via automatic differentiation in PyTorch. The effectiveness of the method is demonstrated on several diagrams involving both geometric and PDE-type functionals for convex bodies of $\mathbb{R}^2$ and $\mathbb{R}^3$, namely, the volume, the perimeter, the moment of inertia, the torsional rigidity, the Willmore energy, and the first two Neumann eigenvalues of the Laplacian.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a neural network-based parametrization of convex bodies via gauge functions that inherently preserves convexity, combined with a Riesz-energy particle system for sampling Blaschke-Santaló diagrams. It demonstrates the approach on diagrams involving volume, perimeter, moment of inertia, torsional rigidity, Willmore energy, and Neumann eigenvalues for convex bodies in two and three dimensions.
Significance. If the parametrization is sufficiently expressive, the framework supplies a practical computational tool for numerically exploring attainable ranges of mixed geometric and PDE shape functionals, potentially aiding discovery of new inequalities. The automatic-differentiation implementation in PyTorch is a concrete implementation strength.
major comments (3)
- [Neural-network parametrization (Section 2)] The central claim that the invertible NN architecture based on gauge functions densely covers the space of all convex bodies (so that sampled diagrams reflect true attainable ranges) is unsupported: no density theorem, approximation result, or Hausdorff-metric convergence guarantee is supplied for the representable sets. This directly affects the validity of all reported diagrams.
- [Numerical experiments (Section 4)] The numerical demonstrations assert effectiveness on several diagrams but supply no quantitative error measures, convergence diagnostics for the particle system, or comparisons against known analytic bounds (e.g., for the torsional rigidity or first Neumann eigenvalue of the disk). Without these, the accuracy of the computed ranges cannot be assessed.
- [Interacting particle system (Section 3)] It is unclear how the Riesz-energy minimization interacts with the finite expressivity of the NN parametrization; if the representable bodies form a proper subclass, the particle system may systematically under-sample the true range, yet no diagnostic or correction is described.
minor comments (2)
- [Section 2] Notation for the gauge function and the invertible network layers could be made more explicit (e.g., explicit formulas for the forward and inverse maps) to facilitate reproducibility.
- [Figures 1-5] Figure captions should state the dimension (R^2 or R^3) and the precise pair of functionals plotted in each diagram.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on our manuscript. We address each major point below and indicate the revisions we will make.
read point-by-point responses
-
Referee: [Neural-network parametrization (Section 2)] The central claim that the invertible NN architecture based on gauge functions densely covers the space of all convex bodies (so that sampled diagrams reflect true attainable ranges) is unsupported: no density theorem, approximation result, or Hausdorff-metric convergence guarantee is supplied for the representable sets. This directly affects the validity of all reported diagrams.
Authors: We acknowledge that the manuscript does not contain a rigorous density or approximation theorem establishing that the gauge-function NN can approximate arbitrary convex bodies in the Hausdorff metric. The architecture guarantees exact convexity preservation for any choice of parameters, and numerical tests recover standard shapes (disks, ellipses, polygons) with high fidelity. In the revision we will add an explicit statement in Section 2 that the generated diagrams describe attainable ranges within the parametrized family, together with a brief discussion of related approximation results for neural representations of convex functions and the practical limitations of the current expressivity. revision: partial
-
Referee: [Numerical experiments (Section 4)] The numerical demonstrations assert effectiveness on several diagrams but supply no quantitative error measures, convergence diagnostics for the particle system, or comparisons against known analytic bounds (e.g., for the torsional rigidity or first Neumann eigenvalue of the disk). Without these, the accuracy of the computed ranges cannot be assessed.
Authors: We agree that quantitative validation is necessary. The revised manuscript will include direct comparisons with known analytic values for the unit disk: relative errors for torsional rigidity and the first Neumann eigenvalue will be reported. We will also add convergence diagnostics for the Riesz-energy particle system (energy decay curves and final energy values) and quantitative measures of diagram coverage (e.g., variance of sampled points and minimum distance to known boundary points). revision: yes
-
Referee: [Interacting particle system (Section 3)] It is unclear how the Riesz-energy minimization interacts with the finite expressivity of the NN parametrization; if the representable bodies form a proper subclass, the particle system may systematically under-sample the true range, yet no diagnostic or correction is described.
Authors: The Riesz-energy minimization is performed in the finite-dimensional parameter space of the neural network; the resulting distribution is therefore uniform with respect to the chosen parametrization rather than with respect to the full space of convex bodies. We will revise Section 3 to clarify this distinction and to describe a simple diagnostic (monitoring the empirical spread of the sampled functionals) that can be used to assess coverage. We will also note that the expressivity can be increased by enlarging the network, and that the reported diagrams are understood to be attainable ranges inside the representable class. revision: partial
Circularity Check
No circularity: purely numerical parametrization and sampling method
full rationale
The paper introduces a gauge-function-based invertible NN parametrization of convex bodies and an interacting particle system minimizing Riesz energy via automatic differentiation. No derivation chain exists that reduces a claimed prediction or uniqueness result to a fitted input or self-citation by construction. The central claims concern numerical effectiveness on specific diagrams, supported by direct computation rather than any self-referential mathematical identity. The expressivity assumption is an unproven modeling choice (correctness risk) but does not create circularity under the enumerated patterns.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Convex bodies admit a parametrization via gauge functions that can be realized by an invertible neural network preserving convexity by construction.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We introduce a parametrization of convex bodies ... using a specific invertible neural network architecture based on gauge functions ... p_θ(x) := β‖x‖ LSE(Wᵀx/‖x‖) ... Theorem 2.3 ... KNN_d is dense in K_d with respect to the Hausdorff distance.
-
IndisputableMonolith/Foundation/ArithmeticFromLogic.leanembed_strictMono_of_one_lt unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
interacting particle system that minimizes a Riesz energy functional ... min |F(Ω_i) − F(Ω_j)|^{-s}
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Forward citations
Cited by 1 Pith paper
-
Parametrizing Convex Sets Using Sublinear Neural Networks
Sublinear neural networks parametrize convex sets by learning their support and gauge functions, backed by a universal approximation theorem and tested on shape optimization tasks.
Reference graph
Works this paper leans on
-
[1]
V. Agostiniani and L. Mazzieri. Monotonicity formulas in potential theory.Calc. Var. Partial Differential Equations, 59(1):6, Feb. 2020
work page 2020
-
[2]
P. R. S. Antunes and B. Bogosel. Parametric shape optimization using the support function.Comput. Optim. Appl., 82(1):107–138, May 2022
work page 2022
-
[3]
P. R. S. Antunes and P. Freitas. New bounds for the principal Dirichlet eigenvalue of planar regions.Experimental Mathematics, 15(3):333–342, March 2006
work page 2006
-
[4]
P. R. S. Antunes and A. Henrot. On the range of the first two dirichlet and neumann eigenvalues of the laplacian. Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences, 467(2130):1577–1603, 12 2010
work page 2010
-
[5]
M. S. Ashbaugh and R. D. Benguria. Universal bounds for the low eigenvalues of Neumann Laplacians in n dimen- sions.SIAM J. Math. Anal., 467(3):557–570, 1993
work page 1993
-
[6]
S. Bartels and G. Wachsmuth. Numerical Approximation of Optimal Convex Shapes.SIAM J. Sci. Comput., Apr. 2020
work page 2020
-
[7]
T. Bayen and D. Henrion. Semidefinite programming for optimizing convex bodies under width constraints.Optim. Methods Softw., Dec. 2012
work page 2012
-
[8]
A. B´ eli` eres Frendo, E. Franck, V. Michel-Dansac, and Y. Privat. Volume-preserving geometric shape optimization of the Dirichlet energy using variational neural networks.Neural Networks, 184:106957, Apr. 2025
work page 2025
-
[9]
C. Bianchini, A. Henrot, and T. Takahashi. Elastic energy of a convex body.Mathematische Nachrichten, 289(5):546– 574, 2016
work page 2016
- [10]
-
[11]
B. Bogosel. The method of fundamental solutions applied to boundary eigenvalue problems.J. Comput. Appl. Math., 306:265–285, Nov. 2016
work page 2016
-
[12]
B. Bogosel. Numerical Shape Optimization Among Convex Sets.Appl. Math. Optim., 87(1):1, Feb. 2023
work page 2023
-
[13]
B. Bogosel, G. Buttazzo, and E. Oudet. On the numerical approximation of Blaschke-Santal´ o diagrams using centroidal Voronoi tessellations.ESAIM, Math. Model. Numer. Anal., 58(1):393–420, 2024
work page 2024
-
[14]
B. Bogosel, A. Henrot, and M. Michetti. Optimization of Neumann Eigenvalues Under Convexity and Geometric Constraints.SIAM J. Math. Anal., Nov. 2024
work page 2024
-
[15]
K. B¨ or¨ oczky, Jr., M. A. Hern´ andez Cifre, and G. Salinas. Optimizing area and perimeter of convex sets for fixed circumradius and inradius.Monatsh. Math., 138(2):95–110, 2003
work page 2003
-
[16]
S. V. Borodachov, D. P. Hardin, and E. B. Saff.Discrete energy on rectifiable sets, volume 4. Springer, 2019
work page 2019
-
[17]
R. Brandenberg and B. Gonz´ alez Merino. A complete 3-dimensional Blaschke-Santal´ o diagram.Math. Inequal. Appl., 20(2):301–348, 2017
work page 2017
-
[18]
R. Brandenberg and B. G. Merino. On (r, d, R)-Blaschke-Santal´ o diagrams with regulark-gon gauges, 2021
work page 2021
-
[19]
R. Brandenberg, B. G. Merino, and M. Runge. A complete system of inequalities for the diameter, in-, and circum- radius in the 3-dimensional Euclidean space. Preprint, arXiv:2509.05028 [math.MG] (2025), 2025
- [20]
- [21]
-
[22]
D. Bucur and A. Henrot. Maximization of the second non-trivial Neumann eigenvalue.Acta Math., 222(2):337–361, June 2019
work page 2019
-
[23]
G. Buttazzo and A. Pratelli. An application of the continuous Steiner symmetrization to Blaschke-Santal´ o diagrams. ESAIM, Control Optim. Calc. Var., 27:13, 2021
work page 2021
-
[24]
B. De Saint-Venant. M´ emoire sur la torsion des prismes.M´ emoires pr´ esent´ es par divers savants ` a l’Acad´ emie des Sciences, 14:233–560, 1856
- [25]
-
[26]
B. Deng, K. Genova, S. Yazdani, S. Bouaziz, G. Hinton, and A. Tagliasacchi. Cvxnet: Learnable convex decompo- sition. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), June 2020
work page 2020
-
[27]
G. E. Fasshauer.Meshfree approximation methods with Matlab (With Cd-rom), volume 6. World Scientific Publishing Company, 2007
work page 2007
-
[28]
I. Ftouhi. On the Cheeger inequality for convex sets.J. Math. Anal. Appl., 504(2):Paper No. 125443, 26, 2021
work page 2021
-
[29]
I. Ftouhi. Complete systems of inequalities relating the perimeter, the area and the Cheeger constant of planar domains.Commun. Contemp. Math., 25(10):44, 2023
work page 2023
-
[30]
I. Ftouhi. Improved Description of Blaschke–Santal´ o Diagrams via Numerical Shape Optimization.Appl. Math. Optim., 91(3):55, June 2025
work page 2025
-
[31]
I. Ftouhi and A. Henrot. The diagram (λ 1, µ1).Math. Rep., Buchar., 24(1-2):159–177, 2022
work page 2022
-
[32]
I. Ftouhi and J. Lamboley. Blaschke-Santal´ o diagram for volume, perimeter, and first Dirichlet eigenvalue.SIAM J. Math. Anal., 53(2):1670–1710, 2021
work page 2021
- [33]
-
[34]
K. Funano. Two new universal inequalities for Neumann eigenvalues of the Laplacian on a planar convex domain. arXiv, Nov. 2025
work page 2025
-
[35]
M. E. Gage. An isoperimetric inequality with applications to curve shortening.Duke Math. J., 50(4):1225–1229, Dec. 1983
work page 1983
-
[36]
R. Gastaldello, A. Henrot, and I. Lucardesi. About the Blaschke-Santal´ o diagram of area, perimeter and moment of inertia.J. Convex Anal., 31(2):563–602, 2024
work page 2024
-
[37]
´A. Gonz´ alez. Measurement of Areas on a Sphere Using Fibonacci and Latitude–Longitude Lattices.Math. Geosci., 42(1):49–64, Jan. 2010
work page 2010
-
[38]
I. Goodfellow, D. Warde-Farley, M. Mirza, A. Courville, and Y. Bengio. Maxout networks. InProceedings of the 30th International Conference on Machine Learning, volume 28 ofProceedings of Machine Learning Research, pages 1319–1327, Atlanta, Georgia, USA, 17–19 June 2013
work page 2013
-
[39]
A. Henrot and M. Pierre.Shape variation and optimization, volume 28 ofEMS Tracts in Mathematics. European Mathematical Society (EMS), Z¨ urich, 2018. A geometrical analysis
work page 2018
-
[40]
J. G. Hoskins and S. Steinerberger. Towards optimal gradient bounds for the torsion function in the plane.J. Geom. Anal., 31(8):7812–7841, 2021
work page 2021
-
[41]
T. Lachand-Robert and ´E. Oudet. Minimizing within Convex Bodies Using a Convex Hull Method.SIAM J. Optim., July 2006
work page 2006
-
[42]
I. Lucardesi and D. Zucco. On Blaschke–Santal´ o diagrams for the torsional rigidity and the first Dirichlet eigenvalue. Ann. Mat. Pura Appl. (4), 201(1):175–201, 2022
work page 2022
-
[43]
E. Makai. On the principal frequency of a membrane and the torsional rigidity of a beam. InStudies in mathematical analysis and related topics, pages 227–231. Stanford Univ. Press, Stanford, Calif., 1962
work page 1962
- [44]
-
[45]
E. Martinet and L. Bungert. Meshless Shape Optimization Using Neural Networks and Partial Differential Equa- tions on Graphs. InScale Space and Variational Methods in Computer Vision, pages 285–297. Springer, Cham, Switzerland, May 2025
work page 2025
-
[46]
D. Mazzoleni and D. Zucco. Convex combinations of low eigenvalues, Fraenkel asymmetries and attainable sets. ESAIM, Control Optim. Calc. Var., 23(3):869–887, 2017
work page 2017
-
[47]
´E. Oudet. Numerical minimization of eigenmodes of a membrane with respect to the domain.ESAIM Control Optim. Calc. Var., 10(3):315–330, 2004
work page 2004
-
[48]
´E. Oudet. Shape Optimization Under Width Constraint.Discrete Comput. Geom., 49(2):411–428, Mar. 2013
work page 2013
-
[49]
A. Paszke, S. Gross, F. Massa, A. Lerer, J. Bradbury, G. Chanan, T. Killeen, Z. Lin, N. Gimelshein, L. Antiga, A. Desmaison, A. K¨ opf, E. Yang, Z. DeVito, M. Raison, A. Tejani, S. Chilamkurthy, B. Steiner, L. Fang, J. Bai, and S. Chintala. PyTorch: An Imperative Style, High-Performance Deep Learning Library.arXiv, Dec. 2019
work page 2019
-
[50]
G. P´ olya. Two more inequalities between physical and geometrical quantities.J. Indian Math. Soc. (N.S.), 24:413– 419 (1961), 1960
work page 1961
-
[51]
G. P´ olya. On the role of the circle in certain variational problems.Ann. Univ. Sci. Budap. Rolando E¨ otv¨ os, Sect. Math., 3-4:233–239, 1961
work page 1961
-
[52]
G. P´ olya and G. Szeg¨ o.Isoperimetric Inequalities in Mathematical Physics. (AM-27). Princeton University Press, Princeton, NJ, USA, 1951
work page 1951
- [53]
-
[54]
G. Szeg¨ o. Inequalities for certain eigenvalues of a membrane of given area.J. Ration. Mech. Anal., 3:343–356, 1954
work page 1954
-
[55]
P. Valtr. Probability thatnrandom points are in convex position.Discrete Comput. Geom., 13(3-4):637–643, 1995
work page 1995
-
[56]
H. F. Weinberger. An isoperimetric inequality for the n-dimensional free membrane problem.Journal of Rational Mechanics and Analysis, 5(4):633–636, 1956. NUMERICAL EXPLORATION OF THE RANGE OF SHAPE FUNCTIONALS USING NEURAL NETWORKS 21
work page 1956
-
[57]
H. Wendland. Meshless galerkin methods using radial basis functions.Mathematics of Computation, 68(228):1521– 1531, 1999. (Eloi Martinet)Institute of Mathematics, University of W ¨urzburg, Germany Email address:eloi.martinet@uni-wuerzburg.de (Ilias Ftouhi)Laboratoire MIPA, N ˆımes University, Site des Carmes, Place Gabriel P ´eri, 30000 Nˆımes, France Ema...
work page 1999
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.