On Uniquely Registrable Networks
Pith reviewed 2026-05-25 17:26 UTC · model grok-4.3
The pith
Rigidity of the body graph is necessary and sufficient for a network to be uniquely registrable.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
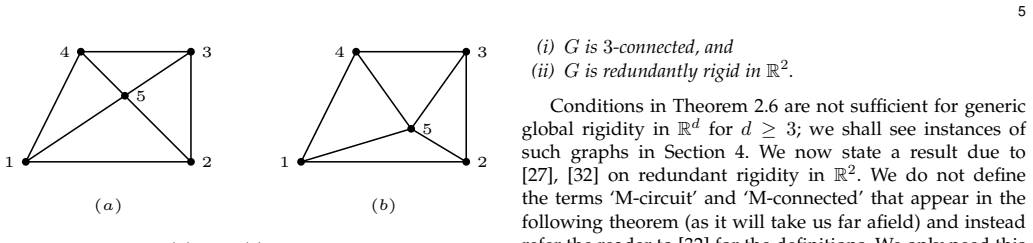
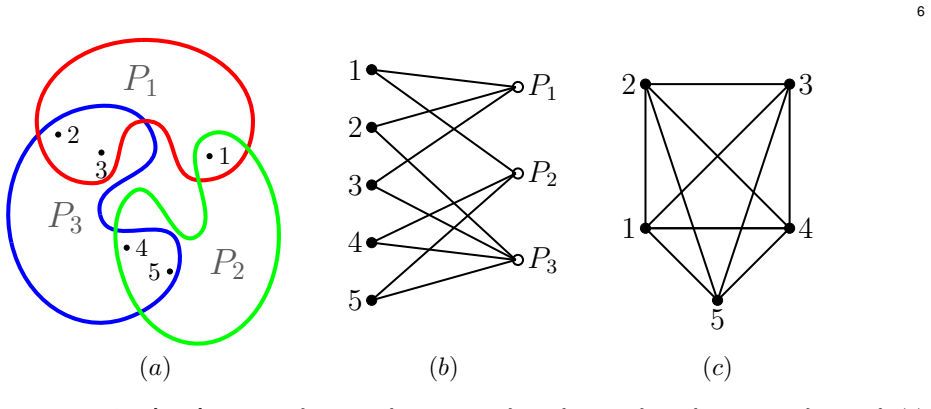
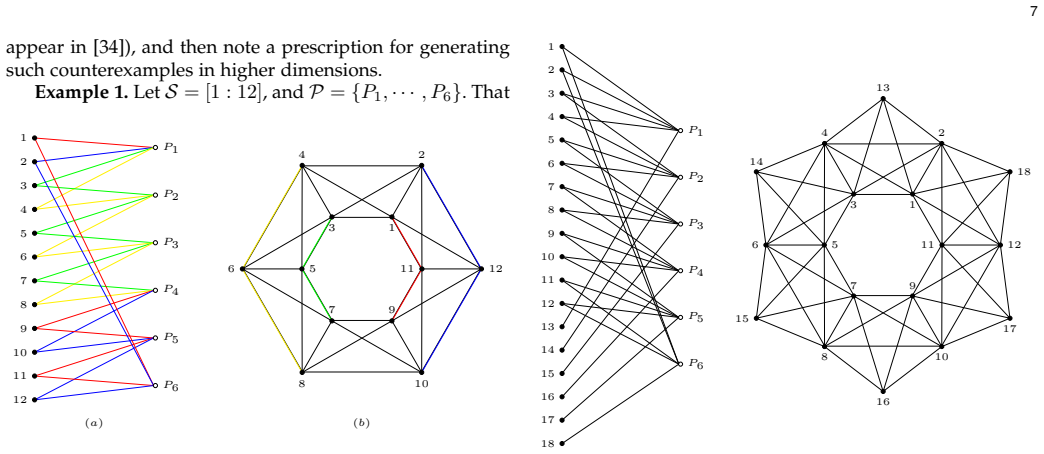
We formulate a necessary and sufficient condition for a network to be uniquely registrable in terms of rigidity of the body graph of the network. A particularly simple characterization of unique registrability is obtained for planar networks. Further, we show that k-vertex-connectivity of the body graph is equivalent to quasi k-connectivity of the bipartite correspondence graph of the network. Along with results from rigidity theory, this helps us resolve a recent conjecture due to Sanyal et al. that quasi 3-connectivity of the correspondence graph is both necessary and sufficient for unique registrability in two dimensions. We present counterexamples demonstrating that while quasi (d+1)-con
What carries the argument
rigidity of the body graph, formed by treating each local subset as a rigid body and linking bodies by shared nodes
If this is right
- Unique registrability holds exactly when the body graph is rigid.
- Quasi 3-connectivity of the correspondence graph is necessary and sufficient for unique registrability in the plane.
- Quasi (d+1)-connectivity of the correspondence graph is necessary in every dimension but not sufficient when dimension is three or higher.
- k-vertex-connectivity of the body graph is equivalent to quasi k-connectivity of the correspondence graph.
Where Pith is reading between the lines
- Designers of sensor or localization networks can verify unique global mapping by testing rigidity of the body graph rather than connectivity alone.
- The planar simplification suggests that two-dimensional registration problems admit efficient combinatorial algorithms based on existing rigidity matroid tools.
- Higher-dimensional registration will require direct rigidity checks that go beyond the connectivity threshold used in the conjecture.
Load-bearing premise
The only continuous ambiguities permitted in the registration are the global rigid motions of the entire network, with exact local coordinates inside each subset.
What would settle it
Construct a three-dimensional network whose correspondence graph is quasi 4-connected yet whose body graph admits a non-trivial flex; the registration must then be non-unique.
Figures
read the original abstract
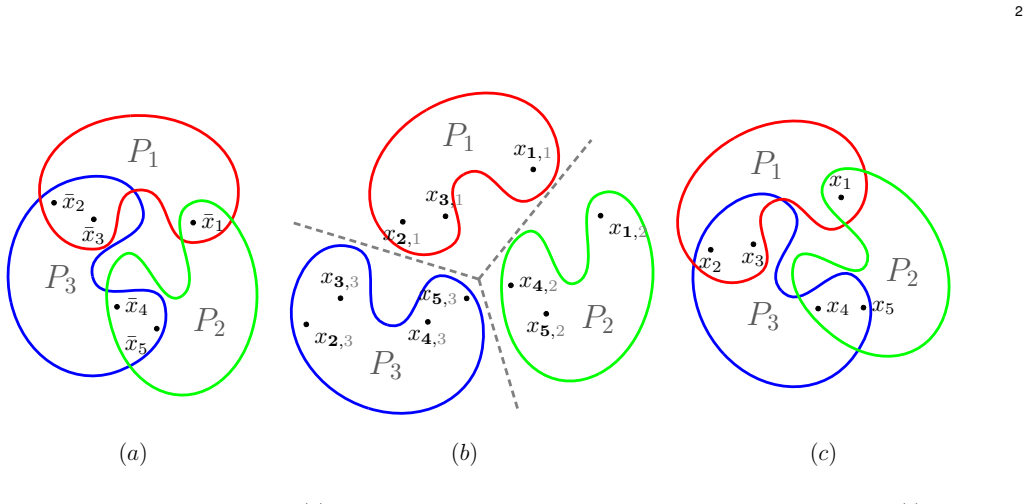
Consider a network with $N$ nodes in $d$-dimensional Euclidean space, and $M$ subsets of these nodes $P_1,\cdots,P_M$. Assume that the nodes in a given $P_i$ are observed in a local coordinate system. The registration problem is to compute the coordinates of the $N$ nodes in a global coordinate system, given the information about $P_1,\cdots,P_M$ and the corresponding local coordinates. The network is said to be uniquely registrable if the global coordinates can be computed uniquely (modulo Euclidean transforms). We formulate a necessary and sufficient condition for a network to be uniquely registrable in terms of rigidity of the body graph of the network. A particularly simple characterization of unique registrability is obtained for planar networks. Further, we show that $k$-vertex-connectivity of the body graph is equivalent to quasi $k$-connectivity of the bipartite correspondence graph of the network. Along with results from rigidity theory, this helps us resolve a recent conjecture due to Sanyal et al. (IEEE TSP, 2017) that quasi $3$-connectivity of the correspondence graph is both necessary and sufficient for unique registrability in two dimensions. We present counterexamples demonstrating that while quasi $(d+1)$-connectivity is necessary for unique registrability in any dimension, it fails to be sufficient in three and higher dimensions.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript claims a necessary and sufficient condition for unique registrability of a network (N nodes in d-space with M observed subsets P_i having exact local coordinates) in terms of rigidity of the associated body graph. It derives a simple characterization for the planar case, proves equivalence between k-vertex-connectivity of the body graph and quasi-k-connectivity of the bipartite correspondence graph, and uses this plus rigidity theory to resolve the Sanyal et al. conjecture (quasi-3-connectivity necessary and sufficient in 2D) while supplying counterexamples showing that quasi-(d+1)-connectivity is necessary but not sufficient for d≥3.
Significance. If the central equivalence holds, the work supplies a clean, graph-theoretic characterization of unique registration that directly imports results from rigidity theory without fitted parameters or ad-hoc assumptions beyond the stated global Euclidean ambiguities. The planar simplification and the counterexamples clarifying the dimensional gap are concrete advances for applications in sensor-network localization and multi-view registration. The explicit resolution of the 2017 conjecture is a notable contribution.
minor comments (3)
- [§2] The body-graph construction (presumably defined in §2 or §3) should include an explicit small example with labeled nodes and edges to illustrate how the subsets P_i become rigid bodies and how inter-body edges arise from shared nodes.
- [Theorem 1] The necessity direction of the main theorem relies on the assumption that local coordinates within each P_i are given exactly and that no additional continuous degrees of freedom exist; a brief remark confirming that the body-graph rigidity exactly captures the remaining global ambiguities would strengthen the statement.
- [§5] The counterexamples for d≥3 (likely in §5) are central to refuting sufficiency of quasi-(d+1)-connectivity; a short table summarizing the number of nodes, subsets, and the specific non-rigid motion in each case would improve readability.
Simulated Author's Rebuttal
We thank the referee for their positive evaluation of the manuscript, accurate summary of its contributions, and recommendation for minor revision. No specific major comments were raised in the report.
Circularity Check
No significant circularity; derivation draws on external rigidity theory
full rationale
The paper's central result formulates unique registrability as equivalent to rigidity of the body graph (with planar simplifications and a connectivity equivalence), explicitly building on established results from rigidity theory and resolving an external conjecture by Sanyal et al. (2017). No step reduces by construction to a self-definition, fitted parameter renamed as prediction, or self-citation chain; the body-graph construction and equivalences are presented as derived from independent prior literature rather than tautological inputs. The setup is self-contained against external benchmarks in combinatorial rigidity.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Rigidity of the body graph is necessary and sufficient for unique registrability (modulo Euclidean transforms).
Reference graph
Works this paper leans on
-
[1]
On a registration- based approach to sensor network localization,
R. Sanyal, M. Jaiswal, and K. N. Chaudhury, “On a registration- based approach to sensor network localization,” IEEE Transactions on Signal Processing, vol. 65, no. 20, pp. 5357–5367, 2017
work page 2017
-
[2]
Sensor network local- ization by eigenvector synchronization over the Euclidean group,
M. Cucuringu, Y. Lipman, and A. Singer, “Sensor network local- ization by eigenvector synchronization over the Euclidean group,” ACM Transactions on Sensor Networks (TOSN) , vol. 8, no. 3, p. 19, 2012
work page 2012
-
[3]
S. J. Gortler, C. Gotsman, L. Liu, and D. P . Thurston, “On affine rigidity,” Journal of Computational Geometry , vol. 4, no. 1, pp. 160– 181, 2013
work page 2013
-
[4]
Global registration of multiple 3D point sets via optimization-on- a-manifold,
S. Krishnan, P . Y. Lee, J. B. Moore, and S. Venkatasubramanian, “Global registration of multiple 3D point sets via optimization-on- a-manifold,” Proc. Eurographics Symposium on Geometry Processing , pp. 187–196, 2005
work page 2005
-
[5]
Multiview registration of 3D scenes by minimizing error between coordinate frames,
G. C. Sharp, S. W. Lee, and D. K. Wehe, “Multiview registration of 3D scenes by minimizing error between coordinate frames,” IEEE Transactions on Pattern Analysis and Machine Intelligence , vol. 26, no. 8, pp. 1037–1050, 2004
work page 2004
-
[6]
Eigenvector synchro- nization, graph rigidity and the molecule problem,
M. Cucuringu, A. Singer, and D. Cowburn, “Eigenvector synchro- nization, graph rigidity and the molecule problem,” Information and Inference: A Journal of the IMA , vol. 1, no. 1, pp. 21–67, 2012
work page 2012
-
[7]
Using a distributed SDP approach to solve simulated protein molecular conformation problems,
X. Fang and K.-C. Toh, “Using a distributed SDP approach to solve simulated protein molecular conformation problems,” Distance Geometry, pp. 351–376, 2013
work page 2013
-
[8]
Principal manifolds and nonlinear dimen- sionality reduction via tangent space alignment,
Z. Zhang and H. Zha, “Principal manifolds and nonlinear dimen- sionality reduction via tangent space alignment,” SIAM Journal on Scientific Computing, vol. 26, no. 1, pp. 313–338, 2004
work page 2004
-
[9]
Wireless sensor net- work localization techniques,
G. Mao, B. Fidan, and B. D. O. Anderson, “Wireless sensor net- work localization techniques,” Computer Networks, vol. 51, no. 10, pp. 2529–2553, 2007
work page 2007
-
[10]
Localization from connectivity in sensor networks,
Y. Shang, W. Rumi, Y. Zhang, and M. Fromherz, “Localization from connectivity in sensor networks,” IEEE Transactions on Parallel and Distributed Systems, vol. 15, no. 11, pp. 961–974, 2004
work page 2004
-
[11]
C. Soares, J. Xavier, and J. Gomes, “Simple and fast convex relaxation method for cooperative localization in sensor networks using range measurements,” IEEE Transactions on Signal Processing, vol. 63, no. 17, pp. 4532–4543, 2015
work page 2015
-
[12]
Distributed maximum likelihood sen- sor network localization,
A. Simonetto and G. Leus, “Distributed maximum likelihood sen- sor network localization,” IEEE Transactions on Signal Processing , vol. 62, no. 6, pp. 1424–1437, 2014
work page 2014
-
[13]
Further relaxations of the semidefinite programming approach to sensor network localiza- tion,
Z. Wang, S. Zheng, Y. Ye, and S. Boyd, “Further relaxations of the semidefinite programming approach to sensor network localiza- tion,” SIAM Journal on Optimization , vol. 19, no. 2, pp. 655–673, 2008
work page 2008
-
[14]
P . Biswas, T.-C. Liang, K.-C. Toh, Y. Ye, and T.-C. Wang, “Semidef- inite programming approaches for sensor network localization with noisy distance measurements,” IEEE transactions on automa- tion science and engineering, vol. 3, no. 4, pp. 360–371, 2006
work page 2006
-
[15]
An as-rigid-as- possible approach to sensor network localization,
L. Zhang, L. Liu, C. Gotsman, and S. J. Gortler, “An as-rigid-as- possible approach to sensor network localization,” ACM Transac- tions on Sensor Networks (TOSN), vol. 6, no. 4, p. 35, 2010
work page 2010
-
[16]
Large-scale sensor net- work localization via rigid subnetwork registration,
K. Chaudhury, Y. Khoo, and A. Singer, “Large-scale sensor net- work localization via rigid subnetwork registration,” Proc. IEEE International Conference on Acoustics, Speech and Signal Processing , pp. 2849–2853, 2015
work page 2015
-
[17]
Global multiview registra- tion using non-convex ADMM,
S. Miraj Ahmed and K. N. Chaudhury, “Global multiview registra- tion using non-convex ADMM,” Proc. IEEE International Conference on Image Processing, pp. 987–991, 2017
work page 2017
-
[18]
Global registration of multiple point clouds using semidefinite programming,
K. N. Chaudhury, Y. Khoo, and A. Singer, “Global registration of multiple point clouds using semidefinite programming,” SIAM Journal on Optimization, vol. 25, no. 1, pp. 468–501, 2015
work page 2015
-
[19]
A theory of network localization,
J. Aspnes, T. Eren, D. K. Goldenberg, A. S. Morse, W. Whiteley, Y. R. Yang, B. D. Anderson, and P . N. Belhumeur, “A theory of network localization,” IEEE Transactions on Mobile Computing , vol. 5, no. 12, pp. 1663–1678, 2006
work page 2006
-
[20]
Rigid network design via sub- modular set function optimization,
I. Shames and T. H. Summers, “Rigid network design via sub- modular set function optimization,” IEEE Transactions on Network Science and Engineering, vol. 2, no. 3, pp. 84–96, 2015
work page 2015
-
[21]
Combinatorial measures of rigidity in wireless sensor and robot networks,
T. Eren, “Combinatorial measures of rigidity in wireless sensor and robot networks,” IEEE 54th Annual Conference on Decision and Control (CDC), pp. 6109–6114, 2015
work page 2015
-
[22]
R. Diestel, Graph theory. Springer-Verlag Berlin and Heidelberg, 2000
work page 2000
-
[23]
L. Asimow and B. Roth, “The rigidity of graphs,” Transactions of the American Mathematical Society, vol. 245, pp. 279–289, 1978
work page 1978
-
[24]
——, “The rigidity of graphs, II,” Journal of Mathematical Analysis and Applications, vol. 68, no. 1, pp. 171–190, 1979
work page 1979
-
[25]
R. Connelly, “Generic global rigidity,” Discrete & Computational Geometry, vol. 33, no. 4, pp. 549–563, 2005
work page 2005
-
[26]
Characterizing generic global rigidity,
S. J. Gortler, A. D. Healy, and D. P . Thurston, “Characterizing generic global rigidity,” American Journal of Mathematics , vol. 132, no. 4, pp. 897–939, 2010
work page 2010
-
[27]
Connected rigidity matroids and unique realizations of graphs,
B. Jackson and T. Jord ´an, “Connected rigidity matroids and unique realizations of graphs,” Journal of Combinatorial Theory, Series B , vol. 94, no. 1, pp. 1–29, 2005
work page 2005
-
[28]
Embeddability of weighted graphs in k-space is strongly NP-Hard,
J. B. Saxe, “Embeddability of weighted graphs in k-space is strongly NP-Hard,” Proc. of 17th Allerton Conference in Communi- cations, Control and Computing, Monticello, IL , pp. 480–489, 1979
work page 1979
-
[29]
Generalizations of Kempe’s Universality Theorem,
T. G. Abbott, “Generalizations of Kempe’s Universality Theorem,” Master’s Thesis, Massachusetts Institute of Technology, 2008
work page 2008
-
[30]
Almost all simply connected closed surfaces are rigid,
H. Gluck, “Almost all simply connected closed surfaces are rigid,” Lecture Notes in Math, vol. 438, pp. 225–239, 1975
work page 1975
-
[31]
Conditions for unique graph realizations,
B. Hendrickson, “Conditions for unique graph realizations,” SIAM Journal on Computing, vol. 21, no. 1, pp. 65–84, 1992
work page 1992
-
[32]
Operations preserving the global rigidity of graphs and frameworks in the plane,
T. Jord ´an and Z. Szabadka, “Operations preserving the global rigidity of graphs and frameworks in the plane,” Computational Geometry, vol. 42, no. 6-7, pp. 511–521, 2009
work page 2009
-
[33]
Jungnickel, Graphs, networks and algorithms
D. Jungnickel, Graphs, networks and algorithms. Springer, 2008
work page 2008
-
[34]
Generic global rigidity of body-hinge frameworks,
T. Jord ´an, C. Kir ´aly, and S. Tanigawa, “Generic global rigidity of body-hinge frameworks,” Journal of Combinatorial Theory, Series B , vol. 117, pp. 59–76, 2016
work page 2016
-
[35]
New classes of counterexamples to Hen- drickson’s global rigidity conjecture,
S. Frank and J. Jiang, “New classes of counterexamples to Hen- drickson’s global rigidity conjecture,” Discrete & Computational Geometry, vol. 45, no. 3, pp. 574–591, 2011
work page 2011
-
[36]
Global rigidity: The effect of coning,
R. Connelly and W. J. Whiteley, “Global rigidity: The effect of coning,” Discrete & Computational Geometry, vol. 43, no. 4, pp. 717– 735, 2010
work page 2010
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.