Power-Duration Characterization of Aggregated Thermostatically Controlled Loads via Reach and Hold Sets
Pith reviewed 2026-05-24 01:23 UTC · model grok-4.3
The pith
A Markov-chain model of TCL dynamics yields a tractable optimization that inner-approximates the reach-and-hold set of an aggregated fleet.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The reach-and-hold set of an aggregated TCL fleet is characterized by formulating a tractable optimization problem that computes an inner approximation from a Markov-chain model of second-order TCL dynamics. The model tracks the joint evolution of on/off states and temperature bins, and the optimization finds the largest reachable power interval that can be maintained for a prescribed hold time. Simulation results show that the computed sets accurately describe the fleet's controllable power consumption under setpoint changes, and a robustness study quantifies sensitivity to initial-condition and parameter uncertainty.
What carries the argument
The reach-and-hold set, obtained as the feasible set of an optimization problem posed over the transition matrices of a Markov-chain model that discretizes second-order TCL temperature dynamics.
If this is right
- Grid operators obtain pre-computed numerical bounds on how much power an AC fleet can deliver or absorb and for how many minutes.
- The same optimization can be re-solved when the fleet size, outdoor temperature, or heterogeneity parameters change.
- The inner approximation supplies a conservative but guaranteed-feasible region for real-time dispatch decisions.
- Uncertainty in initial state or parameter values can be propagated through the same optimization to produce robustified sets.
Where Pith is reading between the lines
- The method could be embedded inside a model-predictive controller that repeatedly solves the optimization over a receding horizon to schedule flexibility.
- If the Markov-chain bins are made finer, the same optimization structure would produce tighter approximations without changing the overall formulation.
- The reach-and-hold characterization may extend directly to other populations whose aggregate dynamics admit a similar Markov-chain description, such as electric-vehicle chargers.
Load-bearing premise
The Markov-chain model is assumed to be accurate enough that its inner-approximated reach-and-hold sets remain valid bounds for real aggregate behavior.
What would settle it
Run the same setpoint-change experiment on a detailed nonlinear simulation of the TCL population and check whether every observed power trajectory stays inside the computed inner-approximation set for the claimed hold duration.
Figures

read the original abstract
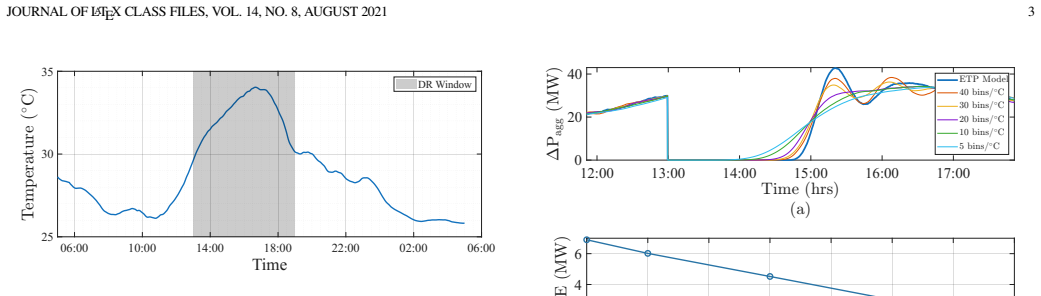
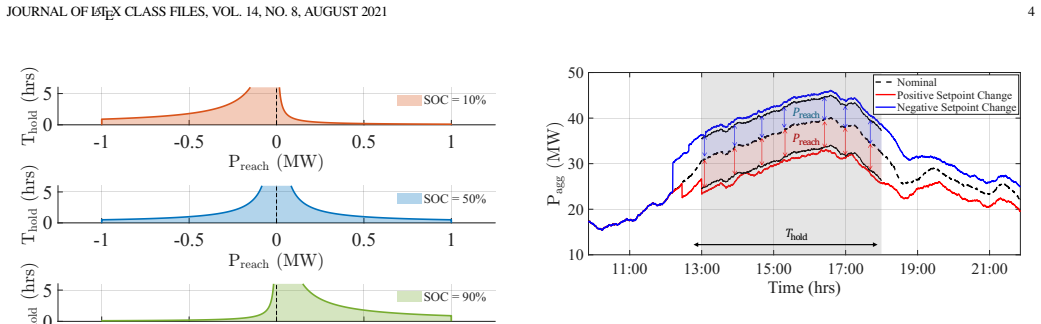
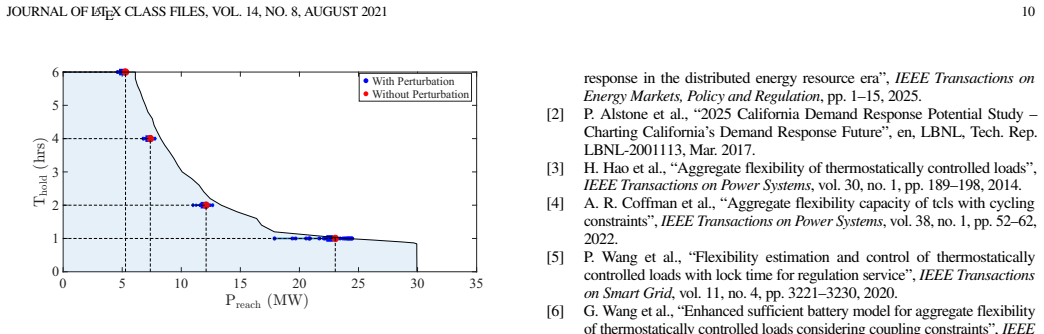
Aggregations of thermostatically controlled loads (TCLs), such as air conditioners, offer valuable flexibility to the power grid. The aggregate power consumption of a TCL fleet can be controlled by adjusting thermostat setpoints. An \textit{ex-ante} quantification of the flexibility that results from such setpoint change can inform grid operator decisions. This paper develops a rigorous, yet practical method to quantify flexibility in terms of the `reach-and-hold' set of TCL aggregations, which defines how much power can be shifted (reach) and for how long (hold). To quantify the reach-and-hold set, we employ a Markov-chain-based model of the TCL aggregation that captures second-order TCL dynamics, enabling accurate characterization of reach-and-hold sets. A tractable optimization problem is then formulated to numerically compute an inner approximation of these sets. Simulation results validate that our method accurately characterizes the fleet's flexibility and effectively controls its power consumption. Furthermore, a robustness analysis is carried out to investigate the effects of uncertainty in initial conditions and TCL parameters.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
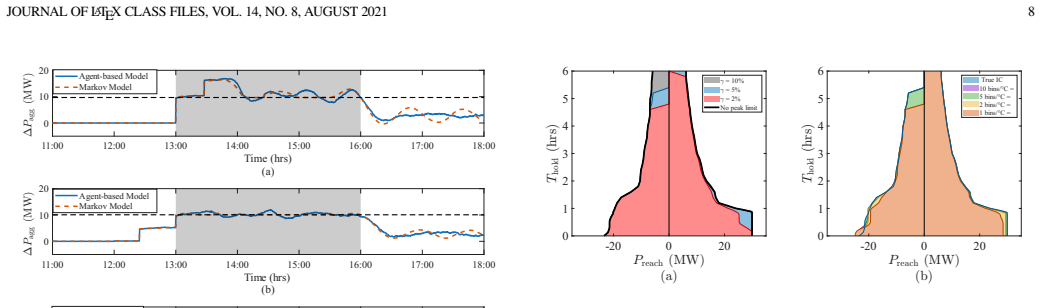
Summary. The paper develops a Markov-chain model of aggregated TCLs that captures second-order dynamics, formulates a tractable optimization problem to compute an inner approximation of the reach-and-hold set (power that can be reached and held for a given duration), and reports simulation validation plus a robustness analysis under initial-condition and parameter uncertainty.
Significance. If the discretization error remains controlled, the method supplies a concrete, numerically tractable characterization of TCL flexibility that grid operators could use for ex-ante scheduling; the explicit simulation validation and robustness checks are concrete strengths that increase practical relevance.
major comments (2)
- [§3] §3 (Markov-chain construction): the transition probabilities are obtained by uniform state-space discretization of the second-order TCL dynamics, yet no explicit bound (Hausdorff distance or otherwise) is derived on the distance between the discrete and continuous reach-and-hold sets; because the inner-approximation optimization is solved on the discrete model, this omission directly affects the claimed accuracy of the power-duration pairs.
- [§4] §4 (Simulation validation): the text states that simulations “validate that our method accurately characterizes the fleet’s flexibility,” but supplies neither quantitative error metrics (e.g., maximum deviation from a continuous-time reference trajectory), nor the number of Monte-Carlo runs, nor any comparison against the underlying ODE model; without these, the support for the central claim cannot be assessed.
minor comments (2)
- [Definition of reach-and-hold set] The notation for the reach-and-hold set (Definition 1 or equivalent) should explicitly state whether the “hold” interval is required to be contiguous or may be interrupted.
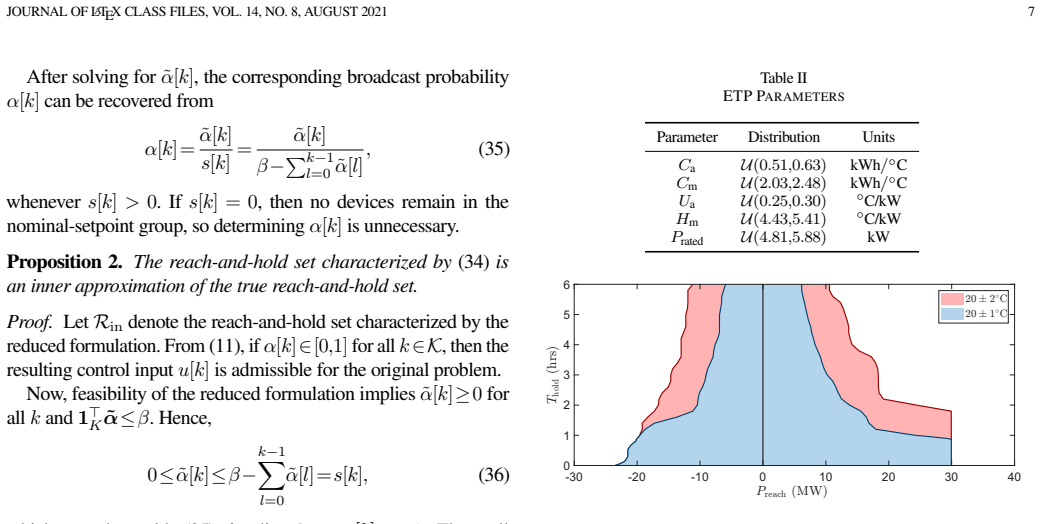
- [Figures] Figure captions should indicate the discretization granularity (number of temperature and auxiliary-state bins) used to generate each plotted set.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which help clarify the presentation of our results. We address each major comment below.
read point-by-point responses
-
Referee: [§3] §3 (Markov-chain construction): the transition probabilities are obtained by uniform state-space discretization of the second-order TCL dynamics, yet no explicit bound (Hausdorff distance or otherwise) is derived on the distance between the discrete and continuous reach-and-hold sets; because the inner-approximation optimization is solved on the discrete model, this omission directly affects the claimed accuracy of the power-duration pairs.
Authors: We acknowledge that the manuscript does not derive an explicit bound (e.g., Hausdorff distance) between the discrete and continuous reach-and-hold sets. The Markov chain is obtained by uniform discretization of the continuous second-order dynamics, and the optimization computes an inner approximation relative to this discrete model. The discretization resolution is selected to balance accuracy and tractability, with simulation results used to assess practical fidelity. In revision we will expand §3 to include a discussion of the discretization parameters, their relation to the continuous dynamics, and any available a-priori error estimates from the Markov-chain approximation literature; however, a rigorous Hausdorff bound would require substantial additional analysis that lies outside the present scope. revision: partial
-
Referee: [§4] §4 (Simulation validation): the text states that simulations “validate that our method accurately characterizes the fleet’s flexibility,” but supplies neither quantitative error metrics (e.g., maximum deviation from a continuous-time reference trajectory), nor the number of Monte-Carlo runs, nor any comparison against the underlying ODE model; without these, the support for the central claim cannot be assessed.
Authors: The simulations in §4 demonstrate that the Markov-chain-based controller keeps aggregate power inside the computed reach-and-hold sets for the indicated durations. We agree that the current presentation lacks quantitative error metrics, the number of Monte-Carlo realizations, and explicit comparisons to the underlying continuous-time ODE trajectories. In the revised manuscript we will add these elements: maximum deviation statistics between achieved and target power, the number of Monte-Carlo runs performed, and side-by-side trajectory comparisons against the original second-order ODE model to provide stronger quantitative support for the validation claims. revision: yes
Circularity Check
No circularity: derivation uses standard Markov-chain discretization and independent optimization formulation
full rationale
The paper presents a Markov-chain model derived from standard state-space discretization techniques for second-order TCL dynamics, then formulates a separate tractable optimization to compute an inner approximation of the reach-and-hold set. No equation reduces a claimed prediction or uniqueness result to a fitted parameter defined by the same data, nor does any load-bearing step rely on a self-citation chain that itself lacks external verification. The abstract and described method treat the Markov model as an input approximation whose accuracy is validated by simulation rather than enforced by construction. This is the common honest case of a self-contained derivation against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The Markov-chain model captures the essential second-order dynamics of the TCL aggregation.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
A tractable optimization problem is formulated to numerically compute an inner approximation of the reach-and-hold sets of TCL aggregations using a Markov-chain-based model that captures second-order TCL dynamics.
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
A new definition and research agenda for demand response in the distributed energy resource era
J. L. Mathieu et al., “A new definition and research agenda for demand response in the distributed energy resource era”,IEEE Transactions on Energy Markets, P olicy and Regulation, pp. 1–15, 2025
work page 2025
-
[2]
2025 California Demand Response Potential Study – Charting California’s Demand Response Future
P . Alstone et al., “2025 California Demand Response Potential Study – Charting California’s Demand Response Future”, en, LBNL, Tech. Rep. LBNL-2001113, Mar. 2017
work page 2025
-
[3]
Aggregate flexibility of thermostatically controlled loads
H. Hao et al., “Aggregate flexibility of thermostatically controlled loads”, IEEE Transactions on P ower Systems, vol. 30, no. 1, pp. 189–198, 2014
work page 2014
-
[4]
Aggregate flexibility capacity of tcls with cycling constraints
A. R. Coffman et al., “Aggregate flexibility capacity of tcls with cycling constraints”,IEEE Transactions on P ower Systems, vol. 38, no. 1, pp. 52–62, 2022
work page 2022
-
[5]
P . W ang et al., “Flexibility estimation and control of thermostatically controlled loads with lock time for regulation service”,IEEE Transactions on Smart Grid, vol. 11, no. 4, pp. 3221–3230, 2020
work page 2020
-
[6]
G. W ang et al., “Enhanced sufficient battery model for aggregate flexibility of thermostatically controlled loads considering coupling constraints”,IEEE Transactions on Sustainable Energy, vol. 12, no. 4, pp. 2493–2496, 2021
work page 2021
-
[7]
A geometric approach to aggregate flexibility modeling of thermostatically controlled loads
L. Zhao et al., “A geometric approach to aggregate flexibility modeling of thermostatically controlled loads”,IEEE Transactions on P ower Systems, vol. 32, no. 6, pp. 4721–4731, 2017
work page 2017
-
[8]
N. Hekmat et al., “Data-driven demand-side flexibility quantification: Prediction and approximation of flexibility envelopes”, in2023 IEEE Belgrade P owerT ech, 2023, pp. 1–6
work page 2023
-
[9]
H. Cai and P . Heer, “Experimental implementation of an emission-aware prosumer with online flexibility quantification and provision”,Sustainable Cities and Society, vol. 111, p. 105 531, 2024
work page 2024
-
[10]
Novel quantification method of aggregated energy flexibility based on power-duration curves
F . Plaum et al., “Novel quantification method of aggregated energy flexibility based on power-duration curves”,IEEE Access, vol. 12, pp. 132 825– 132 837, 2024
work page 2024
-
[11]
R. Malhame and C.-Y . Chong, “Electric load model synthesis by diffusion approximation of a high-order hybrid-state stochastic system”,IEEE Transactions on Automatic Control, vol. 30, no. 9, pp. 854–860, 1985
work page 1985
-
[12]
D. S. Callaway, “T apping the energy storage potential in electric loads to deliver load following and regulation, with application to wind energy”, Energy Conversion and management, vol. 50, no. 5, pp. 1389–1400, 2009
work page 2009
-
[13]
Modeling and control of aggregate air condi- tioning loads for robust renewable power management
S. Bashash and H. K. Fathy, “Modeling and control of aggregate air condi- tioning loads for robust renewable power management”,IEEE Transactions on Control Systems T echnology, vol. 21, no. 4, pp. 1318–1327, 2012
work page 2012
-
[14]
Aggregate power control of heterogeneous tcl populations governed by fokker–planck equations
J. Zheng et al., “ Aggregate power control of heterogeneous tcl populations governed by fokker–planck equations”,IEEE Transactions on Control Systems T echnology, vol. 28, no. 5, pp. 1915–1927, 2020
work page 1915
-
[15]
T . Julien and R. P . Malhame, “Randomized customer-sensitivity-aware con- trol of thermostatic loads for better integration of intermittent renewables”, IEEE Transactions on Control Systems T echnology, 2024
work page 2024
-
[16]
Modeling and control of thermostatically controlled loads
S. N. Backhaus et al., “Modeling and control of thermostatically controlled loads”, Los Alamos National Laboratory (LANL), Jan. 2011
work page 2011
-
[17]
Aggregated modeling and control of air conditioning loads for demand response
W . Zhang et al., “Aggregated modeling and control of air conditioning loads for demand response”,IEEE Transactions on P ower Systems, vol. 28, no. 4, pp. 4655–4664, 2013
work page 2013
-
[18]
M. Liu and Y . Shi, “Model predictive control of aggregated heterogeneous second-order thermostatically controlled loads for ancillary services”,IEEE transactions on power systems, vol. 31, no. 3, pp. 1963–1971, 2015
work page 1963
-
[19]
Building model calibration: V alidation of gridlab- d thermal dynamics modeling
C. D. Goodman et al., “Building model calibration: V alidation of gridlab- d thermal dynamics modeling”, Pacific Northwest National Laboratory (PNNL), Richland, W A (United States), T ech. Rep., Nov. 2022
work page 2022
-
[20]
Development and validation of a second-order thermal net- work model for residential buildings
J. W ang et al., “Development and validation of a second-order thermal net- work model for residential buildings”,Applied Energy, vol. 306, p. 118 124, 2022
work page 2022
-
[21]
Dynamic models of house heating based on equivalent thermal parameters
R. C. Sonderegger, “Dynamic models of house heating based on equivalent thermal parameters.”, Ph.D. dissertation, Princeton University, 1978
work page 1978
-
[22]
Aggregation and control of populations of thermostatically controlled loads by formal abstractions
S. Esmaeil Zadeh Soudjani and A. Abate, “Aggregation and control of populations of thermostatically controlled loads by formal abstractions”, IEEE Transactions on Control Systems T echnology, vol. 23, no. 3, pp. 975– 990, 2015
work page 2015
-
[23]
State estimation and control of electric loads to manage real-time energy imbalance
J. L. Mathieu et al., “State estimation and control of electric loads to manage real-time energy imbalance”,IEEE Transactions on P ower Systems, vol. 28, no. 1, pp. 430–440, 2013
work page 2013
-
[24]
J. Glass et al., “Demand response advanced measurement methodology: Analysis of open-source baseline and comparison group methods to enable caiso demand response resource performance evaluation”, California Independent System Operator (CAISO), T ech. Rep., Feb. 2022
work page 2022
-
[25]
Resideo T echnologies, Inc.,Th303 programmable thermostat owner’s guide, Document No. 69-2680EF—09, Rev. 05-25, Resideo Technologies, Inc., May 2025
work page 2025
-
[26]
Parameter identifiability and estimation of thermostati- cally controlled loads
I. M. Granitsas et al., “Parameter identifiability and estimation of thermostati- cally controlled loads”, in2023 IEEE Belgrade P owerT ech, 2023, pp. 01–06
work page 2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.