MDP-based Energy-aware Task Scheduling for Battery-less IoT
Pith reviewed 2026-05-21 20:07 UTC · model grok-4.3
The pith
An MDP for battery-less IoT scheduling is unichain with an optimal threshold policy that yields a simple OSTB scheduler.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The considered MDP is unichain and the optimal stationary policy has a threshold structure, which leads to an optimal stationary threshold-based (OSTB) scheduler.
What carries the argument
The unichain property of the MDP together with the threshold structure of its optimal stationary policy, which reduces the scheduler to simple voltage-based decisions.
If this is right
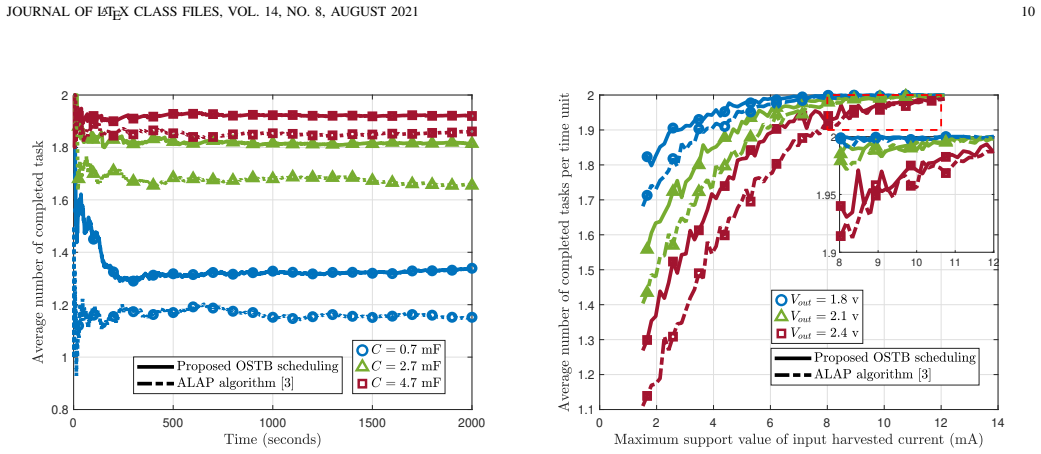
- The OSTB scheduler achieves higher long-term rates of completing the full sensing-computing-transmitting chain.
- Power failures and task latency decrease compared with non-threshold policies when harvested energy is limited.
- The MDP framework extends to correlated energy harvesting under stated conservative sufficient conditions.
Where Pith is reading between the lines
- The threshold rule could be hardcoded on microcontrollers, avoiding repeated MDP solves at runtime.
- Analogous threshold proofs may simplify scheduling in other energy-harvesting systems with timing deadlines.
- Hardware tests with measured solar or RF traces would check whether the i.i.d. model captures essential behavior.
Load-bearing premise
Energy arrivals are independent and identically distributed.
What would settle it
A computed optimal policy from value iteration on the MDP that fails to switch actions at a single threshold per state under i.i.d. arrivals would disprove the structural result.
Figures
read the original abstract
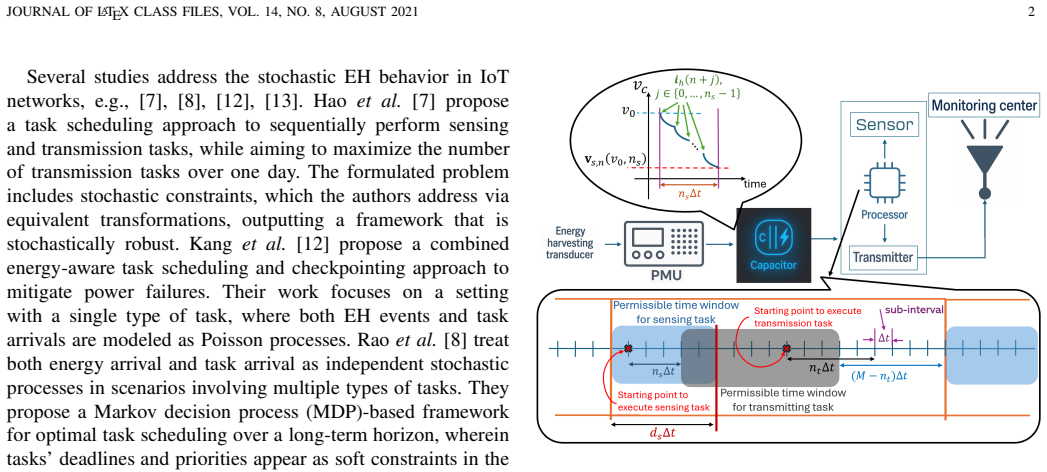
Battery-less Internet of Things (IoT) devices rely on ambient energy harvesting and therefore require scheduling policies that jointly account for energy intermittency and hard timing constraints. This challenge is especially acute in periodic monitoring applications, where a sensing--computing--transmitting task chain must be completed within each reporting cycle. In this paper, we formulate this problem within a setting characterized by independently and identically distributed (i.i.d.) energy arrivals as a long-term average-reward Markov decision process (MDP) that explicitly captures capacitor-voltage evolution, task ordering, permissible start windows, and safe-execution requirements. We further propose rewards that promote reliable task completion while penalizing risky low-energy execution. We prove that the considered MDP is unichain and that the optimal stationary policy has a threshold structure, which leads to an optimal stationary threshold-based (OSTB) scheduler. To account for more realistic energy sources, we additionally study a correlated harvesting model based on a finite-state Markov process and show that the proposed framework can be applied to this richer setting under conservative sufficient conditions. Finally, numerical results show that OSTB outperforms representative baselines in terms of long-term full-chain completion rate, power failures, and latency, particularly when harvested energy is scarce.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript formulates energy-aware scheduling of periodic sensing-computing-transmitting task chains on battery-less IoT devices as a long-term average-reward MDP whose state tracks discretized capacitor voltage, current task phase, and permissible start windows, with actions constrained by safe-execution voltage thresholds. Under i.i.d. energy arrivals it proves the MDP is unichain and that every optimal stationary policy has a threshold structure, yielding the OSTB scheduler; the framework is extended to a finite-state Markov energy-harvesting model under conservative conditions, and numerical experiments compare OSTB against baselines on full-chain completion rate, power-failure frequency, and latency.
Significance. If the unichain and threshold-structure results are valid, the work supplies a rigorous existence proof for optimal stationary policies in an intermittent-energy setting that is directly relevant to sustainable IoT design. The explicit reward construction that trades off completion reliability against low-energy risk, together with the extension to correlated harvesting, constitutes a concrete methodological contribution; the numerical validation under scarce energy further strengthens the practical relevance.
major comments (2)
- [Section 4 (unichain proof)] Unichain proof (Section 4): the connectivity argument that i.i.d. energy arrivals guarantee escape from every low-voltage state regardless of task phase must explicitly state the minimal support condition on the energy distribution. When the support is bounded (e.g., P(E=0) close to 1 or increments too small to satisfy safe-execution thresholds), a policy that idles in a low-voltage phase can induce a separate recurrent class unreachable from other phases, violating unichain and thereby undermining the existence of a constant gain and of an optimal stationary policy.
- [Section 4 (threshold-structure proof)] Threshold-structure proof (Section 4): the induction or coupling argument establishing monotonicity of the optimal action with respect to voltage must be checked against the precise definition of the reward function and the safe-execution constraint; if the reward penalizes low-voltage execution only when an action is taken, the threshold may shift with the current task phase in a way not captured by a single global threshold.
minor comments (2)
- [Abstract and Introduction] The abstract and introduction should cite the exact theorem numbers for the unichain and threshold results so readers can locate the proofs without scanning the entire section.
- [Numerical results] Numerical-results section: the energy-arrival distributions, capacitor capacitance values, and task-phase durations used in the simulations should be tabulated so that the reported performance gains can be reproduced.
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive comments on the proofs in Section 4. We address each major comment below and indicate planned revisions to strengthen the presentation.
read point-by-point responses
-
Referee: [Section 4 (unichain proof)] Unichain proof (Section 4): the connectivity argument that i.i.d. energy arrivals guarantee escape from every low-voltage state regardless of task phase must explicitly state the minimal support condition on the energy distribution. When the support is bounded (e.g., P(E=0) close to 1 or increments too small to satisfy safe-execution thresholds), a policy that idles in a low-voltage phase can induce a separate recurrent class unreachable from other phases, violating unichain and thereby undermining the existence of a constant gain and of an optimal stationary policy.
Authors: We agree that an explicit minimal support condition on the energy distribution is necessary to guarantee the unichain property. The manuscript implicitly relies on the assumption that energy arrivals have sufficient support to allow positive probability of escaping any low-voltage state and satisfying safe-execution thresholds, independent of task phase. We will revise Section 4 to state this condition formally (i.e., that the support of the energy random variable includes increments large enough to cross the relevant voltage thresholds with positive probability from every discretized level). Under this condition the connectivity argument holds and the MDP remains unichain. We will also note the limitation when the condition is violated. revision: yes
-
Referee: [Section 4 (threshold-structure proof)] Threshold-structure proof (Section 4): the induction or coupling argument establishing monotonicity of the optimal action with respect to voltage must be checked against the precise definition of the reward function and the safe-execution constraint; if the reward penalizes low-voltage execution only when an action is taken, the threshold may shift with the current task phase in a way not captured by a single global threshold.
Authors: The induction argument in the proof shows monotonicity of the optimal action in the voltage coordinate for each fixed task phase, taking into account that the reward penalizes low-voltage execution only upon action selection and that safe-execution constraints restrict the feasible action set. Consequently the optimal policy is threshold-based with respect to voltage, but the threshold value is permitted to depend on the current task phase. We will revise the manuscript to clarify that the OSTB scheduler employs phase-dependent voltage thresholds (rather than a single global threshold) and to make the dependence on task phase explicit in the policy description. This clarification does not change the validity of the structural result. revision: partial
Circularity Check
No circularity; standard MDP theory applied to domain-specific formulation
full rationale
The paper formulates the IoT scheduling problem as an average-reward MDP with states capturing capacitor voltage, task phases, and safe-execution constraints under an i.i.d. energy arrival model. It states a proof that the MDP is unichain and that the optimal stationary policy has a threshold structure, leading to the OSTB scheduler. These steps rely on established MDP results for unichain processes (constant gain, existence of optimal stationary policies) rather than any self-definitional equations, fitted parameters renamed as predictions, or load-bearing self-citations. The correlated harvesting extension is handled under conservative conditions without reducing claims to tautologies. Numerical comparisons to baselines are external evaluations. No step in the provided derivation chain reduces by construction to its own inputs; the analysis is self-contained against external MDP benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Energy arrivals are independently and identically distributed.
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
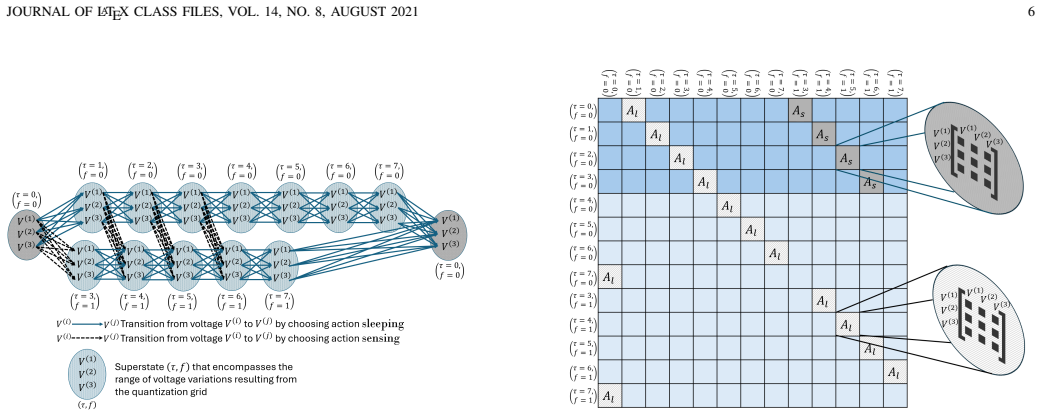
We prove that the considered MDP is unichain and that the optimal stationary policy has a threshold structure... transition matrices Al, As, and At be time-invariant and have strictly positive elements.
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
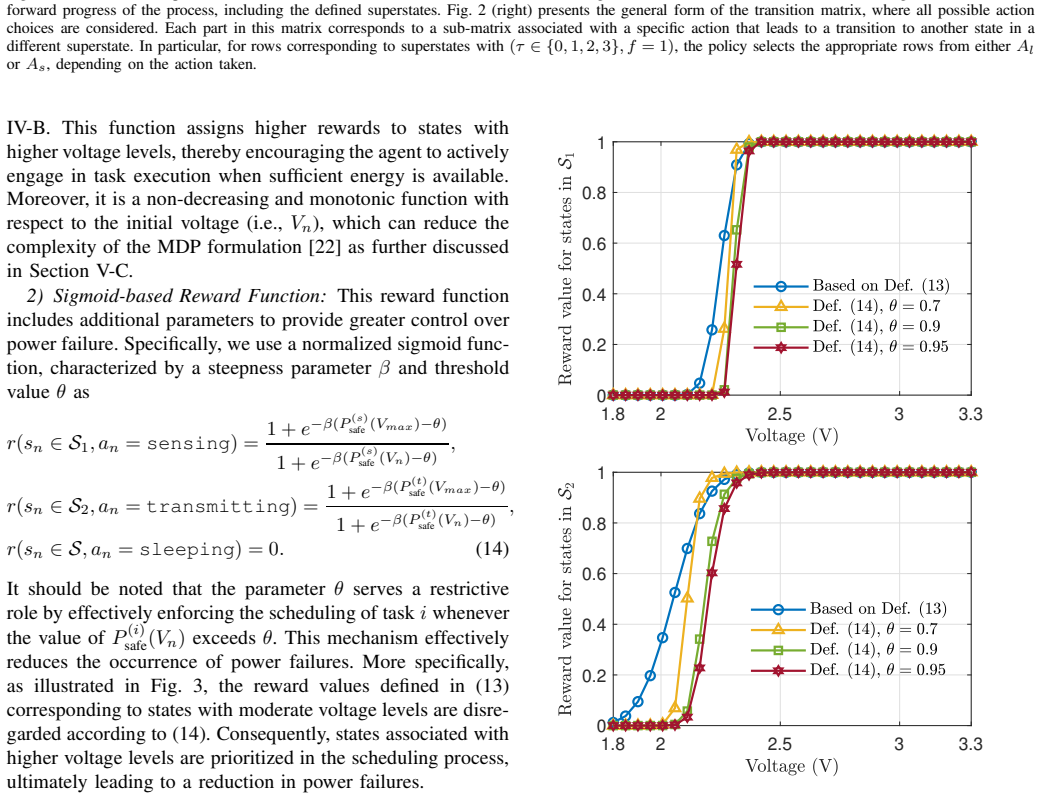
r(sn ∈ S1, an = sensing) = P(s)safe(Vn) ... non-decreasing and monotonic function with respect to the initial voltage
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
O. L. A. L ´ opez, O. M. Rosabal, D. E. Ruiz-Guirola, P . Ragh uwanshi, K. Mikhaylov, L. Lov´ en, and S. Iyer, “Energy-sustainable I oT connec- tivity: Vision, technological enablers, challenges, and f uture directions,” IEEE Open Journal of the Communications Society , vol. 4, pp. 2609– 2666, 2023
work page 2023
-
[2]
Foundations for energ y-aware zero-energy devices: From energy sensing to adaptive proto cols,
O. L. A. L ´ opez, M. Ashraf, S. Nasser, G. M. de Jesus, R. K. Singh, M. C. Filippou, and J. Famaey, “Foundations for energ y-aware zero-energy devices: From energy sensing to adaptive proto cols,” 2025. [Online]. Available: https://arxiv.org/abs/2507.22740
-
[3]
Real-ti me scheduling for energy harvesting sensor nodes,
C. Moser, D. Brunelli, L. Thiele, and L. Benini, “Real-ti me scheduling for energy harvesting sensor nodes,” Real-Time Syst., vol. 37, no. 3, p. 233–260, Dec. 2007
work page 2007
-
[4]
Energy-aware sensing on battery-less LoRaW AN d evices with energy harvesting,
A. Sabovic, C. Delgado, D. Subotic, B. Jooris, E. De Poort er, and J. Famaey, “Energy-aware sensing on battery-less LoRaW AN d evices with energy harvesting,” Electronics, vol. 9, no. 6, 2020. [Online]. Available: https://www.mdpi.com/2079-9292/9/6/904
work page 2020
-
[5]
An energy-aware task scheduler for energy-harvesting bat teryless IoT devices,
A. Sabovic, A. K. Sultania, C. Delgado, L. D. Roeck, and J. Famaey, “An energy-aware task scheduler for energy-harvesting bat teryless IoT devices,” IEEE Internet of Things Journal , vol. 9, no. 22, pp. 23 097– 23 114, 2022
work page 2022
-
[6]
Optimal Energy-Aware Task Sch eduling for Batteryless IoT Devices,
C. Delgado and J. Famaey, “Optimal Energy-Aware Task Sch eduling for Batteryless IoT Devices,” IEEE Transactions on Emerging Topics in Computing, vol. 10, no. 3, pp. 1374–1387, 2022
work page 2022
-
[7]
J. Hao, J. Chen, R. Wang, Y . Zhuang, and B. Zhang, “A Robust Transmission Scheduling Approach for Internet of Things Se nsing Service with Energy Harvesting,” Sensors, vol. 19, no. 14, 2019
work page 2019
-
[8]
Optima l task scheduling policy in energy harvesting wireless senso r networks,
V . S. Rao, R. V . Prasad, and I. G. M. M. Niemegeers, “Optima l task scheduling policy in energy harvesting wireless senso r networks,” in 2015 IEEE Wireless Communications and Networking Conferen ce (WCNC), 2015, pp. 1030–1035
work page 2015
-
[9]
Batter yless LoRaW AN communications using energy harvesting: Modeling and characterization,
C. Delgado, J. M. Sanz, C. Blondia, and J. Famaey, “Batter yless LoRaW AN communications using energy harvesting: Modeling and characterization,” IEEE Internet of Things Journal , vol. 8, no. 4, pp. 2694–2711, 2021
work page 2021
-
[10]
Clank: Architectural support for intermitt ent computation,
M. Hicks, “Clank: Architectural support for intermitt ent computation,” in 2017 ACM/IEEE 44th Annual International Symposium on Compu ter Architecture (ISCA), 2017, pp. 228–240
work page 2017
-
[11]
Flexicheck: A n adaptive checkpointing architecture for energy harvesting devices ,
P . Singla, S. S. Singh, and S. R. Sarangi, “Flexicheck: A n adaptive checkpointing architecture for energy harvesting devices ,” in 2019 Design, Automation & Test in Europe Conference & Exhibition (DATE), 2019, pp. 546–551
work page 2019
-
[12]
Handling power depletion in e nergy har- vesting iot devices,
Y .-m. Kang and Y .-s. Lim, “Handling power depletion in e nergy har- vesting iot devices,” Electronics, vol. 13, no. 14, 2024
work page 2024
-
[13]
A decentralized optimi zation frame- work for energy harvesting devices,
A. Biason, S. Dey, and M. Zorzi, “A decentralized optimi zation frame- work for energy harvesting devices,” IEEE Transactions on Mobile Computing, vol. 17, no. 11, pp. 2483–2496, 2018
work page 2018
-
[14]
Real-t ime task scheduling on intermittently powered batteryless devices ,
M. Karimi, H. Choi, Y . Wang, Y . Xiang, and H. Kim, “Real-t ime task scheduling on intermittently powered batteryless devices ,” IEEE Internet of Things Journal , vol. 8, no. 17, pp. 13 328–13 342, 2021
work page 2021
-
[15]
Fault-tolerant and real-time schedulin g for mixed- criticality systems,
R. M. Pathan, “Fault-tolerant and real-time schedulin g for mixed- criticality systems,” Real-Time Syst. , vol. 50, no. 4, p. 509–547, Jul
-
[16]
Available: https://doi.org/10.1007/s11 241-014-9202-z
[Online]. Available: https://doi.org/10.1007/s11 241-014-9202-z
-
[17]
Effectively schedulin g hard and soft real-time tasks on multiprocessors,
F. M. S. Nascimento and G. Lima, “Effectively schedulin g hard and soft real-time tasks on multiprocessors,” in 2021 IEEE 27th Real-Time and Embedded Technology and Applications Symposium (RTAS) , 2021, pp. 210–222
work page 2021
-
[18]
Cyense: Cyclic ener gy-aware scheduling for energy-harvested embedded systems,
E. Aerabi, M. Fazeli, and D. H´ ely, “Cyense: Cyclic ener gy-aware scheduling for energy-harvested embedded systems,” Microprocessors and Microsystems , vol. 89, p. 104421, 2022. [Online]. Available: https://www.sciencedirect.com/science/article/pii/S0141933121005597
work page 2022
-
[19]
Earliest deadline first schedu ling for real- time computing in sustainable sensors,
M. Chetto and R. El Osta, “Earliest deadline first schedu ling for real- time computing in sustainable sensors,” Sustainability, vol. 15, no. 5,
-
[20]
Available: https://www.mdpi.com/2071-1 050/15/5/3972
[Online]. Available: https://www.mdpi.com/2071-1 050/15/5/3972
work page 2071
-
[21]
Energy prediction for energy-harvesting wireless sensor: A syste matic mapping study,
Z. Y uan, Y . Ge, J. Wei, S. Y uan, R. Liu, and X. Mo, “Energy prediction for energy-harvesting wireless sensor: A syste matic mapping study,” Electronics, vol. 12, no. 20, 2023. [Online]. Available: https://www.mdpi.com/2079-9292/12/20/4304
work page 2023
-
[22]
A priority-aware dynamic scheduling algor ithm for ensuring data freshness in 5g networks,
B.-S. Kim, “A priority-aware dynamic scheduling algor ithm for ensuring data freshness in 5g networks,” Future Generation Computer Systems, vol. 163, p. 107542, 2025. [Online]. Available: https: //www.sciencedirect.com/science/article/pii/S0167739X24005065
work page 2025
-
[23]
Age-based scheduling: Improvin g data freshness for wireless real-time traffic,
N. Lu, B. Ji, and B. Li, “Age-based scheduling: Improvin g data freshness for wireless real-time traffic,” ser. Mobihoc ’18 . New Y ork, NY , USA: Association for Computing Machinery, 2018, p. 191– 200. [Online]. Available: https://doi.org/10.1145/3209582. 3209602
-
[24]
M. L. Puterman, Markov Decision Processes: Discrete Stochastic Dy- namic Programming, 2nd ed. US: Wiley, 2005
work page 2005
-
[25]
Online Learning Sc hemes for Power Allocation in Energy Harvesting Communications,
P . Sakulkar and B. Krishnamachari, “Online Learning Sc hemes for Power Allocation in Energy Harvesting Communications,” IEEE Trans- actions on Information Theory , vol. 64, no. 6, pp. 4610–4628, 2018
work page 2018
-
[26]
S. M. Ross, Introduction to Stochastic Dynamic Programming . CA, USA: Academic, 1983
work page 1983
-
[27]
R. V . Prasad, V . S. Rao, C. Sarkar, and I. Niemegeers, “Re NEW: A Prac- tical Module for Reliable Routing in Networks of Energy-Har vesting Wireless Sensors,” IEEE Transactions on Green Communications and Networking, vol. 5, no. 3, pp. 1558–1569, 2021. JOURNAL OF LATEX CLASS FILES, VOL. 14, NO. 8, AUGUST 2021 13
work page 2021
-
[28]
Networkin g low-power energy harvesting devices: Measurements and algorithms,
M. Gorlatova, A. Wallwater, and G. Zussman, “Networkin g low-power energy harvesting devices: Measurements and algorithms,” IEEE Trans- actions on Mobile Computing , vol. 12, no. 9, pp. 1853–1865, 2013
work page 2013
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.