Certifying Set Attractivity for Discrete-Time Uncertain Nonlinear Switched Systems
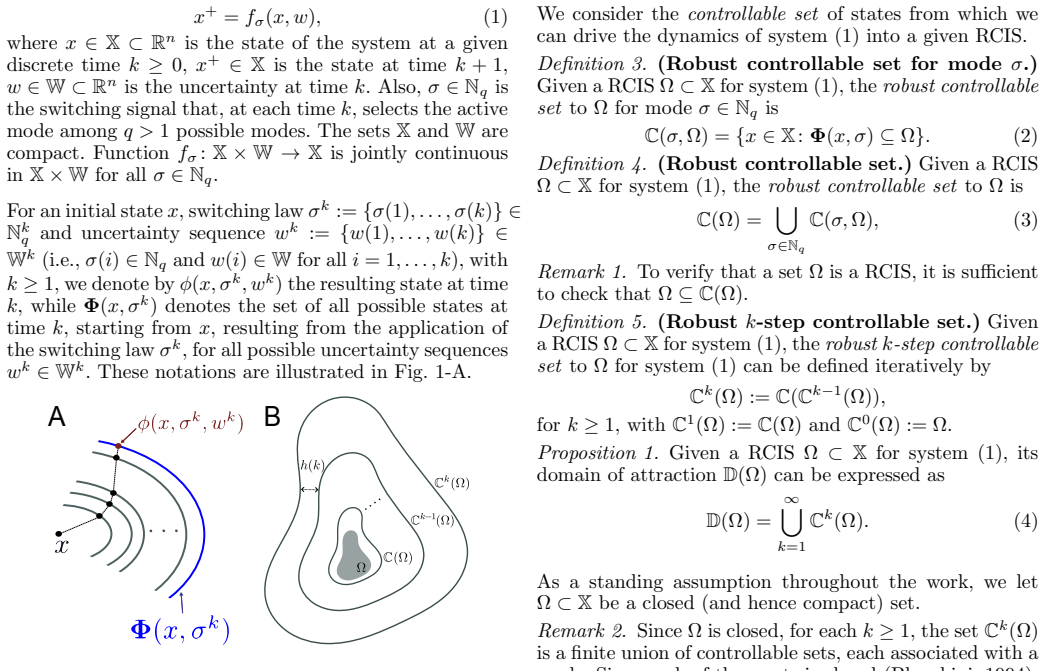
Pith reviewed 2026-05-17 20:16 UTC · model grok-4.3
The pith
An AG-function certifies robust local attractivity for a set in uncertain nonlinear switched systems
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
We introduce a new class of functions, called Attractivity Guarantee (AG)-functions, to certify the attractivity of sets for uncertain nonlinear switched systems in discrete time. The existence of an AG-function associated with a set guarantees the robust local attractivity of that set under the system dynamics. We propose a constructive method for obtaining piecewise-continuous AG-functions based on contractive sets for the system, and show that the existence of a robust control contractive set for the dynamics implies the existence of an appropriate AG-function, and hence the robust local attractivity of the set itself.
What carries the argument
Attractivity Guarantee (AG)-function: a function associated with a set whose existence certifies the set's robust local attractivity under the switched system dynamics
If this is right
- If a robust control contractive set exists then an AG-function can be constructed and the set is robustly locally attractive.
- Piecewise-continuous AG-functions can be obtained directly from contractive sets for uncertain nonlinear switched dynamics.
- The approach certifies attractivity for nonlinear switched models of biological systems such as antimicrobial resistance.
Where Pith is reading between the lines
- The certification could support stability analysis in switched systems without exhaustive simulation of all uncertainty realizations.
- Control design procedures might incorporate search for contractive sets to enforce desired attractivity properties.
- Similar certificates could be explored for related classes of hybrid or continuous-time switched systems.
Load-bearing premise
The existence of a robust control contractive set for the dynamics implies the existence of an appropriate AG-function.
What would settle it
A counterexample system with a robust control contractive set where the target set fails to exhibit robust local attractivity would disprove the key implication.
Figures



read the original abstract
We introduce a new class of functions, called Attractivity Guarantee (AG)-functions, to certify the attractivity of sets for uncertain nonlinear switched systems in discrete time. The existence of an AG-function associated with a set guarantees the robust local attractivity of that set under the system dynamics. We propose a constructive method for obtaining piecewise-continuous AG-functions based on contractive sets for the system, and show that the existence of a robust control contractive set for the dynamics implies the existence of an appropriate AG-function, and hence the robust local attractivity of the set itself. We illustrate the proposed framework through examples that elucidate the theoretical concepts, and through the case study of a nonlinear switched system modelling antimicrobial resistance, which highlights the practical relevance of the approach to the analysis of biological systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces a new class of functions called Attractivity Guarantee (AG)-functions to certify the robust local attractivity of sets for discrete-time uncertain nonlinear switched systems. It shows that the existence of an AG-function for a set guarantees its robust local attractivity under the dynamics. A constructive method is proposed to obtain piecewise-continuous AG-functions from contractive sets for the system, and it is proven that the existence of a robust control contractive set implies the existence of a suitable AG-function (and hence attractivity). The results are illustrated via examples and a case study of a nonlinear switched system modeling antimicrobial resistance.
Significance. If the results hold, the work supplies a constructive certification framework for set attractivity in uncertain switched nonlinear systems that complements Lyapunov-based methods and is directly applicable to biological control problems. The explicit construction of piecewise-continuous AG-functions from robust control contractive sets, together with the uniform decrease properties over uncertainties and switching signals, is a clear strength that supports practical verification.
major comments (1)
- [§3.2, Theorem 3] §3.2, Theorem 3: The central implication from the existence of a robust control contractive set to an AG-function is load-bearing; the proof must explicitly verify that the constructed piecewise-continuous candidate satisfies the AG decrease condition uniformly for every admissible uncertainty and every switching sequence, including at the switching instants where continuity may fail.
minor comments (2)
- [Definition 1] Definition 1: The precise requirements on the AG-function (e.g., the exact form of the class-KL bounds and the role of the set radius) should be stated with an explicit comparison to standard Lyapunov or ISS functions to clarify novelty.
- [Case study] Case study section: The antimicrobial-resistance example would benefit from tabulated parameter values, initial conditions, and a brief description of how the contractive set was computed numerically.
Simulated Author's Rebuttal
We thank the referee for the careful reading of our manuscript and the constructive comment. We address the point raised below and will revise the manuscript accordingly to improve clarity.
read point-by-point responses
-
Referee: [§3.2, Theorem 3] §3.2, Theorem 3: The central implication from the existence of a robust control contractive set to an AG-function is load-bearing; the proof must explicitly verify that the constructed piecewise-continuous candidate satisfies the AG decrease condition uniformly for every admissible uncertainty and every switching sequence, including at the switching instants where continuity may fail.
Authors: We agree that an explicit verification strengthens the proof of the central implication in Theorem 3. The current argument relies on the uniform contractivity of the robust control contractive set to guarantee a uniform decrease factor independent of the uncertainty realization and the switching sequence. However, to address the concern directly, the revised manuscript will expand the proof with an additional paragraph that (i) recalls the piecewise-continuous construction, (ii) verifies the AG decrease inequality at non-switching steps using the contractivity radius, and (iii) treats switching instants separately by considering the value of the candidate function immediately after the switch and confirming that the uniform contraction still holds because the contractive-set property is required to be invariant under all admissible switches. This explicit case analysis will be added without altering the statement or the overall logic of the theorem. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper introduces AG-functions as a new class to certify set attractivity for uncertain nonlinear switched systems in discrete time. It then provides a constructive method to obtain piecewise-continuous AG-functions from contractive sets and proves that the existence of a robust control contractive set implies an appropriate AG-function (hence robust local attractivity). These steps rely on explicit definitions and derivations internal to the paper for the switched dynamics, with no reduction to fitted parameters, self-citations as load-bearing premises, or imported uniqueness theorems. The central implication is shown via direct construction whose decrease properties hold uniformly, making the derivation self-contained without circularity.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Existence of robust control contractive sets implies existence of AG-functions
invented entities (1)
-
AG-function
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
existence of a robust control contractive set ... implies the existence of an appropriate L-function, and hence the robust local attractivity
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Anderson, A., Ohemeng, M., Gonzalez, A., and Hernandez-Vargas, E. (2024). Stabilizability of uncertain switched systems to characterize antibiotic resistance evolution. InIEEE Conference on Decision and Control (CDC), 7050–7055. Anderson, A., D’Jorge, A., Gonz´ alez, A.H., Ferramosca, A., and Actis, M. (2019). Set-based MPC for discrete- time LTI systems ...
-
[2]
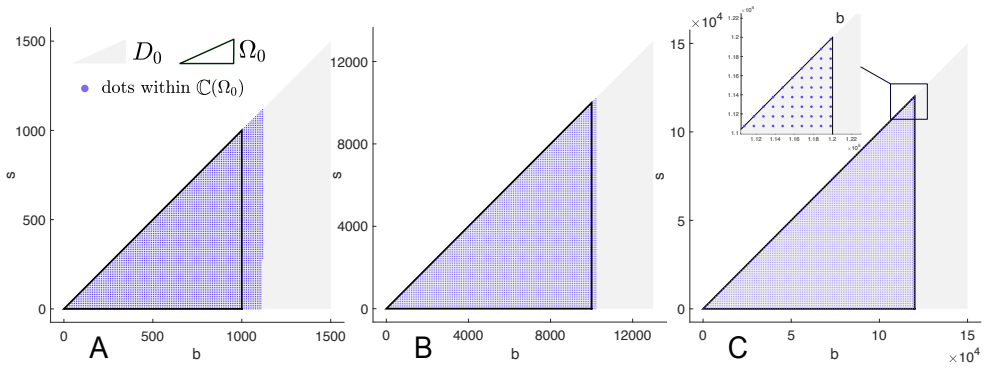
via ˜D(Ω0) = S1500 k=1 Ck(Ω0), where Ω 0 is the set associated withb 0 = 100,000, for which the inclusion Ω 0 ⊆int C(Ω0) holds.A.The triangular RCCS Ω 0 and its approximated domain of attractionC 1500(Ω0) are the sets enclosed in the black and blue contours, respectively.B.The RCCS Ω 0 is shown along withC k(Ω0) fork= 1, . . . ,1500.C.The RCCS Ω 0 is show...
work page 2014
-
[3]
Liberzon, D. and Morse, A.S. (2024). Basic problems in stability and design of switched systems.IEEE Control Systems, 44(5), 12–14. Lin, H. and Antsaklis, P.J. (2009). Stability and stabiliz- ability of switched linear systems: a survey of recent re- sults.IEEE Transactions on Automatic Control, 54(2), 308–322. Mason, P., Chitour, Y., and Sigalotti, M. (2...
work page 2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.