Robust Energy Shaping Control of an Underactuated Inverted Pendulum
Pith reviewed 2026-05-16 08:39 UTC · model grok-4.3
The pith
Analytical solutions to energy-shaping PDEs enable robust IDA-PBC stabilization of a rotary inverted pendulum.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Concise analytical solutions exist for the kinetic and potential energy PDEs of the rotary inverted pendulum, allowing construction of an IDA-PBC law that includes an additional robust compensation term for a specified disturbance class.
What carries the argument
IDA-PBC controller built from analytically solved energy-shaping PDEs together with an added robust disturbance rejection term.
If this is right
- The closed-loop system reaches asymptotic stability around the upright equilibrium despite underactuation.
- Disturbances belonging to the addressed class are rejected while preserving passivity properties.
- The control law remains implementable in real time because all expressions are closed-form.
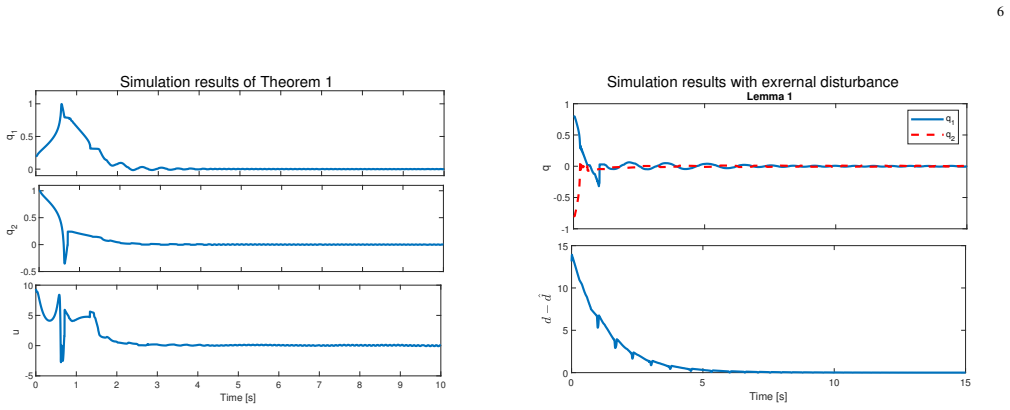
- Numerical trajectories remain bounded and converge under the combined energy-shaping plus robust action.
Where Pith is reading between the lines
- The same analytical PDE approach may apply to other rotary or cart-pendulum variants once similar coordinate choices are identified.
- Adding explicit robust terms could be tested in related energy-shaping controllers for marine or aerial vehicles.
- Hardware experiments on a physical rotary pendulum would provide direct evidence of disturbance rejection performance.
Load-bearing premise
Concise analytical solutions to the kinetic and potential energy PDEs can be derived for this particular rotary inverted pendulum.
What would settle it
Demonstration that no closed-form solutions to the PDEs exist, or that the robust term fails to cancel the target disturbance class, would falsify the central claim.
Figures
read the original abstract
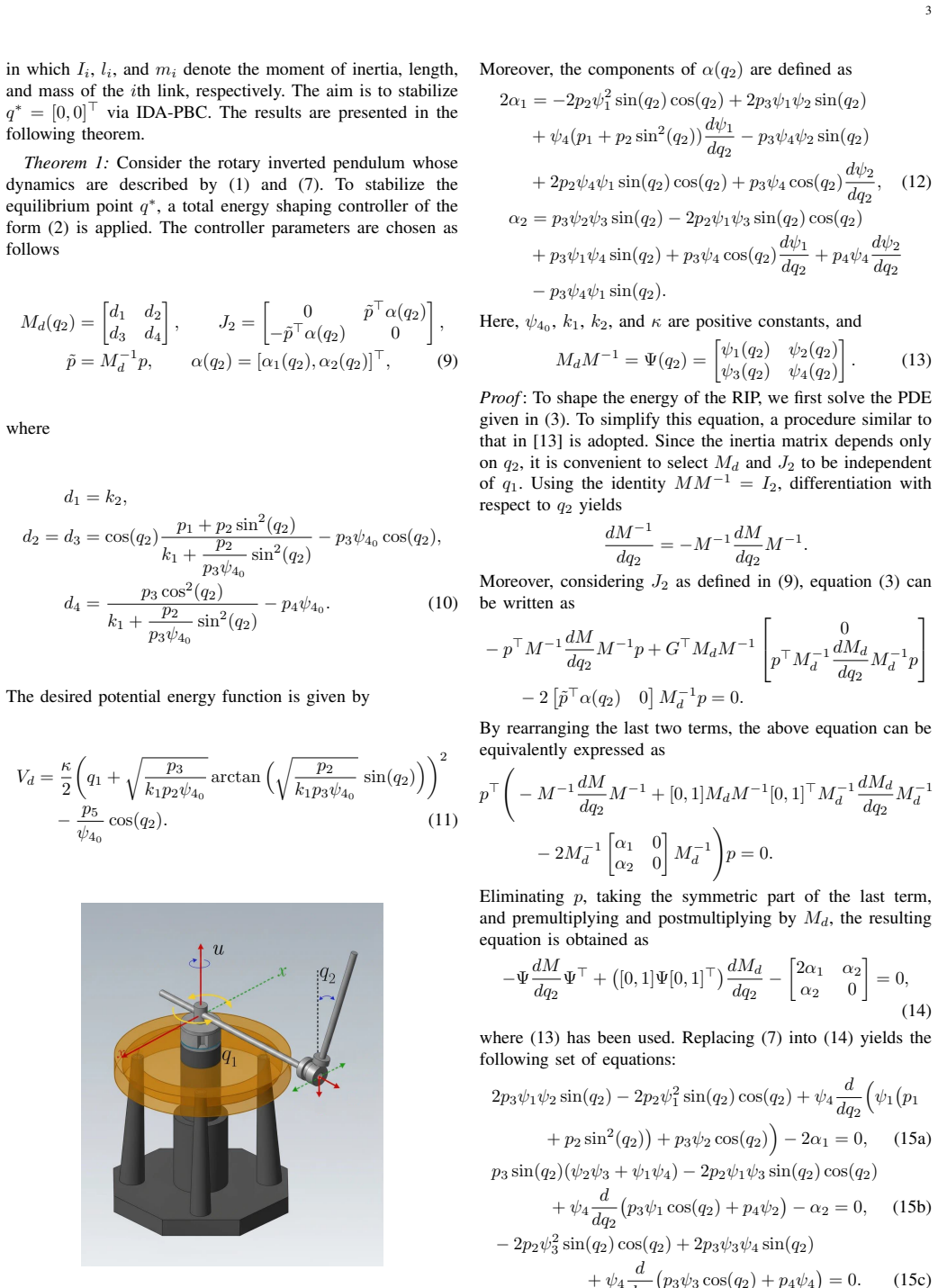
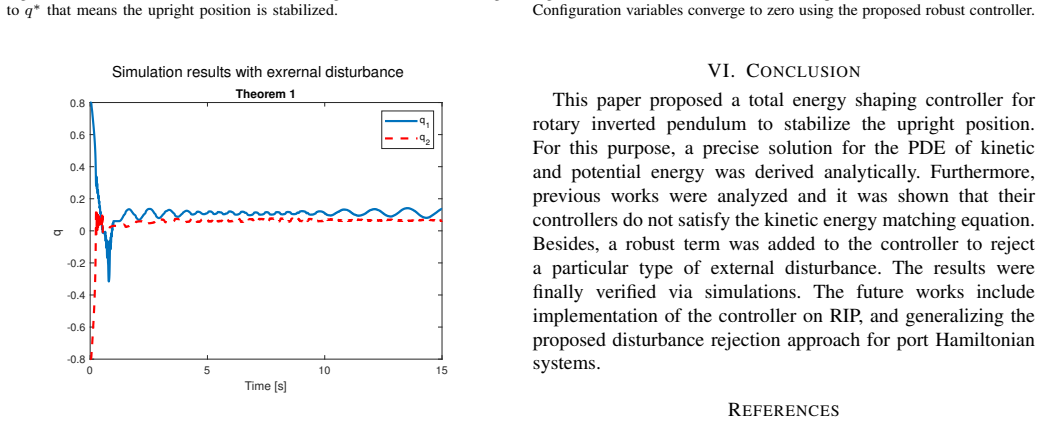
Although the stabilization of underactuated systems remains a challenging problem, the total energy shaping approach provides a general framework for addressing this objective. However, the practical implementation of this method is hindered by the need to analytically solve a set of partial differential equations (PDEs), which constitutes a major obstacle. In this paper, a rotary inverted pendulum system is considered, and an interconnection and damping assignment passivity-based control (IDA-PBC) scheme is developed by deriving concise analytical solutions to the kinetic and potential energy PDEs. Furthermore, a novel robust term is incorporated into the control law to compensate for a specific class of disturbances that has not been addressed within the existing IDA-PBC literature. The effectiveness of the proposed method is validated through numerical simulations, demonstrating satisfactory control performance.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper develops an interconnection and damping assignment passivity-based control (IDA-PBC) scheme for a rotary inverted pendulum by deriving concise analytical solutions to the kinetic and potential energy PDEs. It incorporates a novel robust term into the control law to compensate for a specific class of disturbances not previously addressed in IDA-PBC literature, with the approach validated through numerical simulations demonstrating satisfactory stabilization performance.
Significance. If the analytical solutions are confirmed to satisfy the PDEs exactly, the work would advance energy-shaping methods for underactuated mechanical systems by reducing the typical barrier of solving matching PDEs analytically and by extending IDA-PBC with robustness to a new disturbance class. This could enable more practical implementations in robotics where closed-form solutions are uncommon.
major comments (2)
- [Abstract] Abstract and methods: the central claim requires concise analytical solutions to the kinetic and potential energy PDEs, yet the manuscript presents candidate expressions without derivation steps or any substitution verification that the PDE residuals are identically zero (rather than approximately small). This verification is load-bearing for the closed-loop energy function to satisfy the required passivity properties and stabilization guarantee.
- [Robust term] Robust control law section: no explicit disturbance model or characterization of the 'specific class of disturbances' is provided, nor is the form of the novel robust term given, preventing assessment of whether it addresses disturbances outside existing IDA-PBC literature.
minor comments (1)
- [Simulations] Simulations section: results would benefit from quantitative metrics (e.g., settling time, overshoot) and direct comparison against standard IDA-PBC without the robust term to isolate the contribution of the new term.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive report. We agree that additional explicit verification and characterization are needed to strengthen the central claims. We will revise the manuscript to incorporate the requested details on the PDE solutions and the robust term, as outlined in our point-by-point responses below.
read point-by-point responses
-
Referee: [Abstract] Abstract and methods: the central claim requires concise analytical solutions to the kinetic and potential energy PDEs, yet the manuscript presents candidate expressions without derivation steps or any substitution verification that the PDE residuals are identically zero (rather than approximately small). This verification is load-bearing for the closed-loop energy function to satisfy the required passivity properties and stabilization guarantee.
Authors: We agree that the derivation steps and substitution verification are essential for rigor. In the revised manuscript we will expand the methods section to include the complete step-by-step analytical derivation of the solutions to both the kinetic-energy and potential-energy PDEs. We will also explicitly substitute the obtained expressions back into the original PDEs and show that all residuals are identically zero (not merely numerically small), thereby confirming that the closed-loop energy function satisfies the required passivity properties and the stabilization guarantee. revision: yes
-
Referee: [Robust term] Robust control law section: no explicit disturbance model or characterization of the 'specific class of disturbances' is provided, nor is the form of the novel robust term given, preventing assessment of whether it addresses disturbances outside existing IDA-PBC literature.
Authors: We acknowledge that the disturbance model and the explicit form of the robust term were not sufficiently detailed. In the revision we will add a dedicated subsection that (i) precisely characterizes the considered disturbance class (additive matched disturbances whose time derivatives satisfy a known bound, a class not covered by prior IDA-PBC robust extensions), (ii) states the explicit mathematical expression of the novel robust term, and (iii) discusses how this term extends the existing IDA-PBC literature by handling the new disturbance class while preserving the energy-shaping structure. revision: yes
Circularity Check
No circularity: analytical PDE solutions and robust term are independently derived
full rationale
The paper derives closed-form solutions to the kinetic and potential energy matching PDEs for IDA-PBC on the rotary inverted pendulum and augments the control law with a novel robust term for a stated disturbance class. No quoted equation or claim reduces the result to a fitted parameter renamed as prediction, a self-definition, or a load-bearing self-citation chain. The central stabilization guarantee rests on the explicit construction of the desired inertia and potential functions plus the added robust term, validated by simulation; this is self-contained against external benchmarks and does not invoke uniqueness theorems or prior author results as the sole justification.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Concise analytical solutions to the kinetic and potential energy PDEs exist for the rotary inverted pendulum dynamics
- domain assumption Disturbances belong to the specific class the robust term is constructed to reject
invented entities (1)
-
novel robust term in the control law
no independent evidence
Reference graph
Works this paper leans on
-
[1]
J. A. Acosta, R. Ortega, A. Astolfi, and A. D. Mahindrakar, “Intercon- nection and damping assignment passivity-based control of mechanical systems with underactuation degree one,”IEEE Transactions on Auto- matic Control, vol. 50, no. 12, pp. 1936–1955, 2005
work page 1936
-
[2]
G. Viola, R. Ortega, R. Banavar, J. ´A. Acosta, and A. Astolfi, “Total energy shaping control of mechanical systems: simplifying the matching equations via coordinate changes,”IEEE Transactions on Automatic Control, vol. 52, no. 6, pp. 1093–1099, 2007
work page 2007
-
[3]
Shaping the energy of mechanical systems without solving partial differential equations,
A. Donaire, R. Mehra, R. Ortega, S. Satpute, J. G. Romero, F. Kazi, and N. M. Singh, “Shaping the energy of mechanical systems without solving partial differential equations,” in2015 American Control Conference (ACC), pp. 1351–1356, IEEE, 2015
work page 2015
-
[4]
On the matching equations of kinetic energy shaping in ida-pbc,
M. R. J. Harandi and H. D. Taghirad, “On the matching equations of kinetic energy shaping in ida-pbc,”Journal of the Franklin Institute, 2021
work page 2021
-
[5]
On the pdes arising in ida-pbc,
J. ´A. Acosta and A. Astol, “On the pdes arising in ida-pbc,” inPro- ceedings of the 48h IEEE Conference on Decision and Control (CDC) held jointly with 2009 28th Chinese Control Conference, pp. 2132–2137, IEEE, 2009
work page 2009
-
[6]
Solution of matching equations of ida-pbc by pfaffian differential equations,
M. R. J. Harandi and H. D. Taghirad, “Solution of matching equations of ida-pbc by pfaffian differential equations,”International Journal of Control, vol. 95, no. 12, pp. 3368–3378, 2022
work page 2022
-
[7]
Shaping the energy of port- hamiltonian systems without solving pde’s,
P. Borja, R. Cisneros, and R. Ortega, “Shaping the energy of port- hamiltonian systems without solving pde’s,” in2015 54th IEEE Confer- ence on Decision and Control (CDC), pp. 5713–5718, IEEE, 2015
work page 2015
-
[8]
M. R. J. Harandi,Passivity Based Control of 3-DOF Underactuated Suspended Cable-Driven Robot. PhD thesis, K. N. Toosi University of Technology, 2021
work page 2021
-
[9]
M. Ryalat and D. S. Laila, “Ida-pbc for a class of underactuated mechanical systems with application to a rotary inverted pendulum,” in 52nd IEEE conference on decision and control, pp. 5240–5245, IEEE, 2013. 7
work page 2013
-
[10]
Ro- bust ida-pbc for underactuated mechanical systems subject to matched disturbances,
A. Donaire, J. G. Romero, R. Ortega, B. Siciliano, and M. Crespo, “Ro- bust ida-pbc for underactuated mechanical systems subject to matched disturbances,”International Journal of Robust and Nonlinear Control, vol. 27, no. 6, pp. 1000–1016, 2017
work page 2017
-
[11]
On matched disturbance suppression for port-hamiltonian systems,
J. Ferguson, D. Wu, and R. Ortega, “On matched disturbance suppression for port-hamiltonian systems,”IEEE Control Systems Letters, vol. 4, no. 4, pp. 892–897, 2020
work page 2020
-
[12]
E. Franco and K. Chen, “Integral ida-pbc for underactuated mechanical systems with unmeasured actuator dynamics and time-varying matched disturbances,”European Journal of Control, p. 101256, 2025
work page 2025
-
[13]
Interconnection and damping assignment passivity—based control of the pendubot,
J. Sandoval, R. Ortega, and R. Kelly, “Interconnection and damping assignment passivity—based control of the pendubot,”IF AC Proceedings V olumes, vol. 41, no. 2, pp. 7700–7704, 2008
work page 2008
-
[14]
R. Ortega, M. W. Spong, F. G ´omez-Estern, and G. Blankenstein, “Stabilization of a class of underactuated mechanical systems via inter- connection and damping assignment,”IEEE transactions on automatic control, vol. 47, no. 8, pp. 1218–1233, 2002
work page 2002
-
[15]
R. Hernandez, R. Garcia-Hernandez, and F. Jurado, “Modeling, sim- ulation, and control of a rotary inverted pendulum: A reinforcement learning-based control approach,”Modelling, vol. 5, no. 4, pp. 1824– 1852, 2024
work page 2024
-
[16]
Global stabilisation of underactuated mechanical systems via pid passivity-based control,
J. G. Romero, A. Donaire, R. Ortega, and P. Borja, “Global stabilisation of underactuated mechanical systems via pid passivity-based control,” Automatica, vol. 96, pp. 178–185, 2018
work page 2018
-
[17]
G. Viola, Banavar, J. Acosta, and A. Astolfi, “Some remarks on intercon- nection and damping assignment passivity-based control of mechanical systems,”Taming Heterogeneity and Complexity of Embedded Control, pp. 721–735, 2013
work page 2013
-
[18]
Robust ida-pbc for a spatial underactuated cable driven robot with bounded inputs,
M. R. J. Harandi, S. A. Khalilpour, and H. Taghirad, “Robust ida-pbc for a spatial underactuated cable driven robot with bounded inputs,” in2021 29th Iranian Conference on Electrical Engineering (ICEE), pp. 689–694, IEEE, 2021
work page 2021
-
[19]
Output feedback stabilization of a class of uncertain systems,
D. Karagiannis, A. Astolfi, and R. Ortega, “Output feedback stabilization of a class of uncertain systems,” inNonlinear and Adaptive Control: Tools and Algorithms for the User, pp. 55–77, World Scientific, 2006
work page 2006
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.