Scaling and Trade-offs in Multi-agent Autonomous Systems
Pith reviewed 2026-05-25 06:39 UTC · model grok-4.3
The pith
Dimensional analysis collapses autonomous swarm simulation data onto simple scaling functions that reveal counterintuitive success-failure boundaries including an effective swarm size.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
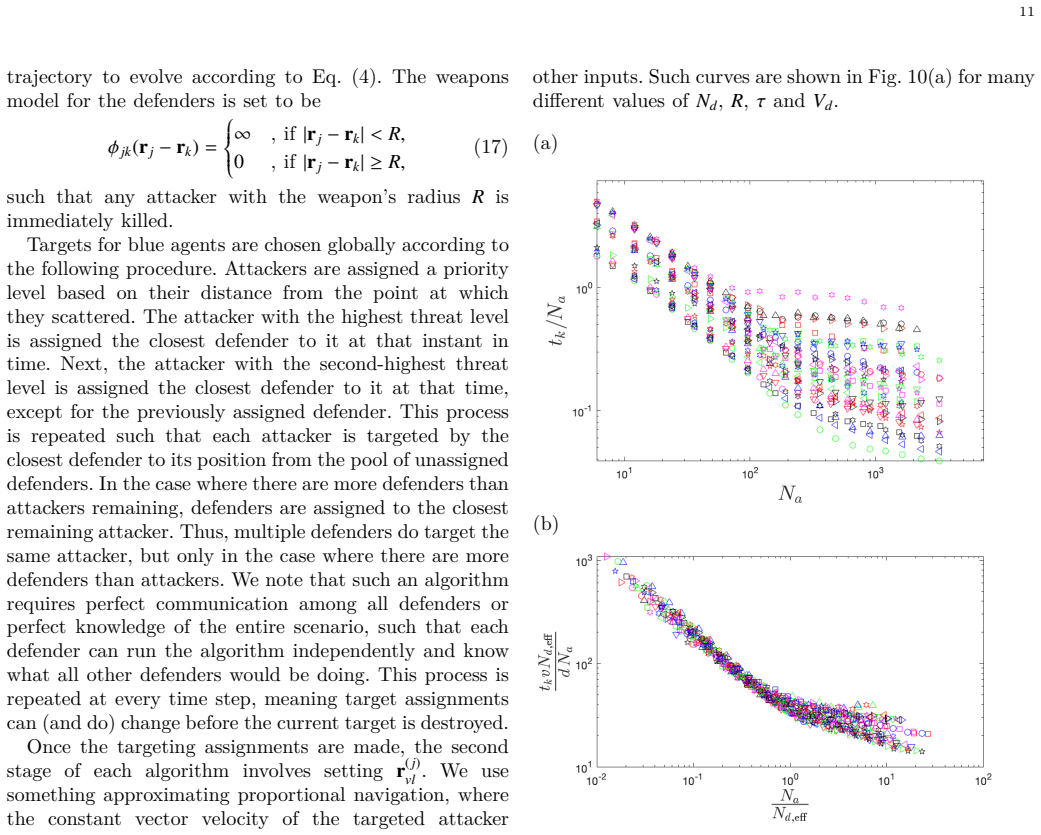
Dimensional-analysis and data-scaling applied to performance data from the three canonical scenarios collapse the outcomes onto scaling functions that are mathematically simple yet counterintuitive. These scaling laws identify success-failure boundaries, including sharp break points that can be framed as an effective swarm size. The same technique quantifies trade-offs between agent count and platform parameters such as velocity, sensing or weapon range, and attrition rate. Embedding an optimal path planning loop inside the framework qualitatively improves the scaling laws that govern the outcome.
What carries the argument
dimensional-analysis and data-scaling applied to outputs of agent-based simulations, which collapses performance metrics onto simple scaling functions and isolates an effective swarm size
If this is right
- Sharp performance break points can be interpreted directly as an effective swarm size.
- Trade-offs between agent numbers and parameters such as velocity, range, and attrition rate become quantifiable through the collapsed scaling functions.
- Incorporating optimal path planning changes the scaling laws in a qualitatively beneficial direction.
- The overall method supports rapid, budget-aware sizing and algorithm selection for large autonomous swarms.
Where Pith is reading between the lines
- Designers could use the scaling functions to narrow the space of candidate swarm sizes before any hardware is built.
- The counterintuitive character of the functions implies that extrapolation from small-scale tests alone is likely to produce incorrect size estimates.
- The same collapse technique might be tested on other multi-agent domains where exhaustive simulation is also costly.
Load-bearing premise
The agent-based simulations in the three canonical scenarios produce dynamics representative enough of real autonomous systems that the extracted scaling functions remain valid outside the simulated environment.
What would settle it
Running physical drone-swarm experiments in scenarios matching the three simulated ones and checking whether the observed performance break points occur at the effective swarm sizes predicted by the scaling functions.
Figures









read the original abstract
Designing autonomous drone swarms is hampered by a vast design space spanning platform, algorithmic, and numerical-strength choices. We perform large-scale agent-based simulations in three canonical scenarios: swarm-on-swarm battle, cooperative area search with attrition, and pursuit of scattering targets. We demonstrate how dimensional-analysis and data-scaling can be leveraged to collapse performance data onto scaling functions that are mathematically simple, yet counterintuitive and therefore difficult to predict a priori. These scaling laws reveal success-failure boundaries, including sharp break points which we show can be framed as an ``effective swarm size.'' Additionally, we show how this technique can be used to quantify trade-offs between agent count and platform parameters such as velocity, sensing or weapon range, and attrition rate. Furthermore, we show the benefits of embedding an optimal path planning loop within this framework, which can qualitatively improve the scaling laws that govern the outcome. The methods we demonstrate are highly flexible and would enable rapid, budget-aware sizing and algorithm selection for large autonomous swarms.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript performs large-scale agent-based simulations across three canonical scenarios (swarm-on-swarm battle, cooperative area search with attrition, and pursuit of scattering targets) and applies dimensional analysis plus data scaling to collapse performance metrics onto simple scaling functions. These functions are claimed to expose success-failure boundaries, including sharp breakpoints framed as an 'effective swarm size,' to quantify trade-offs between agent count and parameters such as velocity, sensing/weapon range, and attrition rate, and to show qualitative improvement when an optimal path-planning loop is embedded.
Significance. If the extracted scaling functions prove robust, the approach supplies a practical, budget-aware framework for sizing large autonomous swarms and selecting algorithms without exhaustive enumeration of the design space. The use of three distinct scenarios and the explicit framing of trade-offs constitute a strength of the work.
major comments (2)
- [Results (all three scenarios) and Methods] The central claim that the scaling functions and 'effective swarm size' arise from dimensional properties (rather than from specific simulation choices such as discrete-time updates, probabilistic attrition models, or finite sensing cones) is load-bearing. No sensitivity analysis is presented that perturbs these implementation details and re-derives the exponents or breakpoints; without it the generality asserted in the abstract cannot be assessed.
- [Abstract and §3–5] The abstract states that performance data collapse onto 'mathematically simple' scaling functions, yet the manuscript supplies neither the explicit dimensionless groups, the functional forms fitted, the fitting procedure, nor quantitative error metrics (R², residual distributions, or held-out validation). This omission directly undermines the claim that the functions are counter-intuitive yet predictive.
minor comments (1)
- Figures should include explicit labels for the scaled variables on both axes together with any confidence bands or data-exclusion criteria used in the collapse.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which identify key gaps in demonstrating robustness and documentation of the scaling analysis. We address each major comment below and will revise the manuscript to incorporate the suggested improvements.
read point-by-point responses
-
Referee: [Results (all three scenarios) and Methods] The central claim that the scaling functions and 'effective swarm size' arise from dimensional properties (rather than from specific simulation choices such as discrete-time updates, probabilistic attrition models, or finite sensing cones) is load-bearing. No sensitivity analysis is presented that perturbs these implementation details and re-derives the exponents or breakpoints; without it the generality asserted in the abstract cannot be assessed.
Authors: We agree that the absence of sensitivity analysis limits assessment of generality. In the revised manuscript we will add sensitivity studies that systematically vary the discrete time step, attrition model (e.g., deterministic vs. probabilistic), and sensing-cone geometry, then re-derive the scaling exponents and breakpoints. Results will be reported to confirm that the functional forms and effective-swarm-size thresholds remain consistent. revision: yes
-
Referee: [Abstract and §3–5] The abstract states that performance data collapse onto 'mathematically simple' scaling functions, yet the manuscript supplies neither the explicit dimensionless groups, the functional forms fitted, the fitting procedure, nor quantitative error metrics (R², residual distributions, or held-out validation). This omission directly undermines the claim that the functions are counter-intuitive yet predictive.
Authors: We acknowledge that the scaling details are insufficiently documented. The revised manuscript will explicitly list the dimensionless groups obtained from dimensional analysis, state the fitted functional forms, describe the regression/fitting procedure, and supply quantitative metrics (R², residual distributions, and held-out validation error) for each scenario. These additions will directly support the claims of mathematical simplicity and predictive utility. revision: yes
Circularity Check
No circularity; scaling laws obtained via empirical data collapse
full rationale
The paper runs agent-based simulations in three scenarios, applies dimensional analysis to identify candidate dimensionless groups, and then collapses the resulting performance data onto simple scaling functions. This process is data-driven and falsifiable against the simulation outputs; the scaling functions are not defined in terms of themselves, no parameters are fitted on a subset and then relabeled as predictions on the same data, and no load-bearing self-citations or uniqueness theorems are invoked. The derivation chain therefore remains self-contained and does not reduce to its inputs by construction.
Axiom & Free-Parameter Ledger
invented entities (1)
-
effective swarm size
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.lean; Cost/FunctionalEquation.leanreality_from_one_distinction; washburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We demonstrate how dimensional-analysis and data-scaling can be leveraged to collapse performance data onto scaling functions... effective swarm size... Buckingham-π theorem
-
IndisputableMonolith/Foundation/AlphaCoordinateFixation.lean; Constants.leanalpha_pin_under_high_calibration; phi_golden_ratio unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Na,eff ≈ Na(λd/λa)^α A(Rd/Ra, Rd/dr) with α≈0.6; Neff = V Rs N / (λ A)
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Kallenborn, Are Drone Swarms Weapons of Mass Destruc- tion? U.S
Z. Kallenborn, Are Drone Swarms Weapons of Mass Destruc- tion? U.S. Air Force Center for Strategic Deterrence Studies, Air University, Maxwell AFB, AL: U.S., 2020
work page 2020
-
[2]
Swarming destruction: drone swarms and chemical, biological, radiological, and nuclear weapons,
Z. Kallenborn and P. C. Bleek, “Swarming destruction: drone swarms and chemical, biological, radiological, and nuclear weapons,” The Nonproliferation Review, vol. 25, no. 5-6, pp. 523–543, 2018
work page 2018
-
[3]
H. Hamann, T. Aust, and A. Reina, “Guerrilla performance analysis for robot swarms: Degrees of collaboration and chains of interference events,” in International Conference on Swarm Intelligence, pp. 134–147, Springer, 2020
work page 2020
-
[4]
On using simulation to predict the performance of robot swarms,
A. Ligot and M. Birattari, “On using simulation to predict the performance of robot swarms,” Scientific Data, vol. 9, no. 1, p. 788, 2022
work page 2022
-
[5]
Swarm robotics: A survey from a multi-tasking perspective,
E. Debie, K. Kasmarik, and M. Garratt, “Swarm robotics: A survey from a multi-tasking perspective,” ACM Computing Surveys, vol. 56, no. 2, pp. 1–38, 2023
work page 2023
-
[6]
Mathematical model of foraging in a group of robots: Effect of interference,
K. Lerman and A. Galstyan, “Mathematical model of foraging in a group of robots: Effect of interference,” Autonomous robots, vol. 13, no. 2, pp. 127–141, 2002
work page 2002
-
[7]
J. J. Dawkins, F. L. Crabbe, and D. Evangelista, “Deployment and flight operations of a large scale uas combat swarm: Results from darpa service academies swarm challenge,” in 2018 International Conference on Unmanned Aircraft Systems (ICUAS), pp. 1271–1278, 2018
work page 2018
-
[8]
On physically similar systems; illustrations of the use of dimensional equations,
E. Buckingham, “On physically similar systems; illustrations of the use of dimensional equations,” Phys. Rev., vol. 4, pp. 345– 376, Oct 1914
work page 1914
-
[9]
G. I. Barenblatt, Dimensional analysis. CRC Press, 1987
work page 1987
-
[10]
J. C. Gibbings, Dimensional analysis. Springer Science & Business Media, 2011
work page 2011
-
[11]
J. H. Williams, Dimensional Analysis. 2053-2563, Bristol, United Kingdom: IOP Publishing, 2021
work page 2053
-
[12]
Modeling large-scale adversarial swarm engagements using optimal control,
T. Tsatsanifos, A. H. Clark, C. Walton, I. Kaminer, and Q. Gong, “Modeling large-scale adversarial swarm engagements using optimal control,” in 2021 60th IEEE Conference on Decision and Control (CDC), pp. 1244–1249, IEEE, 2021
work page 2021
-
[13]
Defense against adversarial swarms with parameter uncertainty,
C. Walton, I. Kaminer, Q. Gong, A. H. Clark, and T. Tsat- sanifos, “Defense against adversarial swarms with parameter uncertainty,” Sensors, vol. 22, no. 13, p. 4773, 2022
work page 2022
-
[14]
Observability analysis of an adversarial swarm’s cooperation strategy,
H. Park, Q. Gong, W. Kang, C. Walton, and I. Kaminer, “Observability analysis of an adversarial swarm’s cooperation strategy,” in 2018 IEEE 14th International Conference on Control and Automation (ICCA), pp. 992–997, IEEE, 2018
work page 2018
-
[15]
Optimal motion planning in rapid-fire combat sit- uations with attacker uncertainty,
C. Walton, P. Lambrianides, I. Kaminer, J. Royset, and Q. Gong, “Optimal motion planning in rapid-fire combat sit- uations with attacker uncertainty,” Naval Research Logistics (NRL), vol. 65, no. 2, pp. 101–119, 2018
work page 2018
-
[16]
T. Tsatsanifos, COMPUTATIONALLY EFFICIENT ALGO- RITHMS FOR OPTIMAL MOTION PLANNING AGAINST MULTI-DOMAIN SUPER SW ARMS. PhD thesis, Dept. of Physics, Monterey, CA; Naval Postgraduate School, 2020
work page 2020
-
[17]
Emergent behavior in strongly correlated electron systems,
D. Pines, “Emergent behavior in strongly correlated electron systems,” Reports on Progress in Physics, vol. 79, no. 9, p. 092501, 2016
work page 2016
-
[18]
Emergent behavior in active colloids,
A. Zöttl and H. Stark, “Emergent behavior in active colloids,” Journal of Physics: Condensed Matter, vol. 28, no. 25, p. 253001, 2016
work page 2016
-
[19]
Emergent dynamics of laboratory insect swarms,
D. H. Kelley and N. T. Ouellette, “Emergent dynamics of laboratory insect swarms,” Scientific reports, vol. 3, no. 1, p. 1073, 2013
work page 2013
-
[20]
Dimensional analysis and the buckingham pi the- orem,
J. H. Evans, “Dimensional analysis and the buckingham pi the- orem,” American Journal of Physics, vol. 40, no. 12, pp. 1815– 1822, 1972
work page 1972
-
[21]
Note on the history of the reynolds number,
N. Rott, “Note on the history of the reynolds number,” Annual review of fluid mechanics, vol. 22, no. 1, pp. 1–12, 1990
work page 1990
-
[22]
Journey to the center of stars: the realm of low prandtl number fluid dynamics,
P. Garaud, “Journey to the center of stars: the realm of low prandtl number fluid dynamics,” Physical Review Fluids, vol. 6, no. 3, p. 030501, 2021
work page 2021
-
[23]
Rheophysics of dense granular materials: Discrete simulation of plane shear flows,
F. da Cruz, S. Emam, M. Prochnow, J.-N. Roux, and F. m. c. Chevoir, “Rheophysics of dense granular materials: Discrete simulation of plane shear flows,” Phys. Rev. E, vol. 72, p. 021309, Aug 2005
work page 2005
-
[24]
Power-law scaling of early-stage forces during granular impact,
N. Krizou and A. H. Clark, “Power-law scaling of early-stage forces during granular impact,” Phys. Rev. Lett., vol. 124, p. 178002, Apr 2020
work page 2020
-
[25]
S. H. Strogatz, Nonlinear dynamics and chaos: with applications to physics, biology, chemistry, and engineering. CRC press, 2018
work page 2018
-
[26]
H. Koorehdavoudi and P. Bogdan, “A statistical physics charac- terization of the complex systems dynamics: Quantifying com- plexity from spatio-temporal interactions,” Scientific Reports, vol. 6, no. 1, p. 27602, 2016
work page 2016
-
[27]
Critical scaling of shear viscosity at the jamming transition,
P. Olsson and S. Teitel, “Critical scaling of shear viscosity at the jamming transition,” Physical Review Letters, vol. 99, no. 17, p. 178001, 2007
work page 2007
-
[28]
Critical scaling for yield is independent of distance to isostaticity,
J. D. Thompson and A. H. Clark, “Critical scaling for yield is independent of distance to isostaticity,” Physical Review Research, vol. 1, no. 1, p. 012002, 2019
work page 2019
-
[29]
Virtual leaders, artificial po- tentials and coordinated control of groups,
N. E. Leonard and E. Fiorelli, “Virtual leaders, artificial po- tentials and coordinated control of groups,” in Proceedings of the 40th IEEE conference on decision and control (Cat. No. 01CH37228), vol. 3, pp. 2968–2973, IEEE, 2001
work page 2001
-
[30]
P. Ogren, E. Fiorelli, and N. E. Leonard, “Cooperative control of mobile sensor networks: Adaptive gradient climbing in a distributed environment,” IEEE Transactions on Automatic control, vol. 49, no. 8, pp. 1292–1302, 2004
work page 2004
-
[31]
Zero to swarm: Integrating suas swarming into a multi- disciplinary engineering program,
T. Brick, M. Lanham, A. Kopeikin, C. Korpela, and R. Morales, “Zero to swarm: Integrating suas swarming into a multi- disciplinary engineering program,” in 2018 International Con- ference on Unmanned Aircraft Systems (ICUAS), pp. 308–314, 2018
work page 2018
-
[32]
CasADi: a software framework for nonlinear op- timization and optimal control,
J. A. Andersson, J. Gillis, G. Horn, J. B. Rawlings, and M. Diehl, “CasADi: a software framework for nonlinear op- timization and optimal control,” Mathematical Programming Computation, vol. 11, no. 1, pp. 1–36, 2019
work page 2019
-
[33]
L. T. Biegler and V. M. Zavala, “Large-scale nonlinear program- ming using IPOPT: An integrating framework for enterprise- wide dynamic optimization,” Computers & Chemical Engineer- ing, vol. 33, no. 3, pp. 575–582, 2009
work page 2009
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.