Real-World LoRaWAN Performance and Propagation Modeling Using UAV, Helikite, and Vehicle-Based Measurements
Pith reviewed 2026-05-10 18:21 UTC · model grok-4.3
The pith
Helikite measurements at 150-300 meters yield more consistent LoRaWAN links than drone or ground-vehicle tests across the same sites.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Field data collected with three platforms show that a helikite at fixed high altitude produces the most reliable and consistent LoRaWAN reception, while a moving drone at 50 m and a ground vehicle exhibit greater variability from motion, obstructions, and terrain-induced multipath; a log-distance path-loss model fitted to the vehicle measurements quantifies propagation under mixed rural-urban NLOS conditions.
What carries the argument
Comparative RSSI and SNR measurements versus distance, together with a fitted log-distance path-loss model applied to ground-vehicle data.
If this is right
- Adaptive spreading-factor selection becomes more critical for mobile platforms than for fixed high-altitude ones.
- Network planners can use the fitted log-distance parameters to estimate coverage when ground-level nodes interact with aerial gateways.
- Helikite-style platforms may reduce the need for frequent retransmissions in LoRaWAN deployments that tolerate higher altitudes.
Where Pith is reading between the lines
- If the stability advantage holds, helikites could serve as low-cost relays for extending LoRaWAN range in areas with variable terrain.
- The variability patterns suggest that drone-based LoRaWAN surveys would need shorter flight segments or higher sampling rates to match helikite reliability.
Load-bearing premise
The AERPAW testbed sites, chosen altitudes, and vehicle routes are representative enough that the relative performance ordering and the fitted model parameters apply to other environments.
What would settle it
Repeating the same three-platform experiment at a new rural or suburban site and finding that the drone or vehicle links show lower variability than the helikite at 150-300 m would falsify the consistency claim.
Figures

read the original abstract
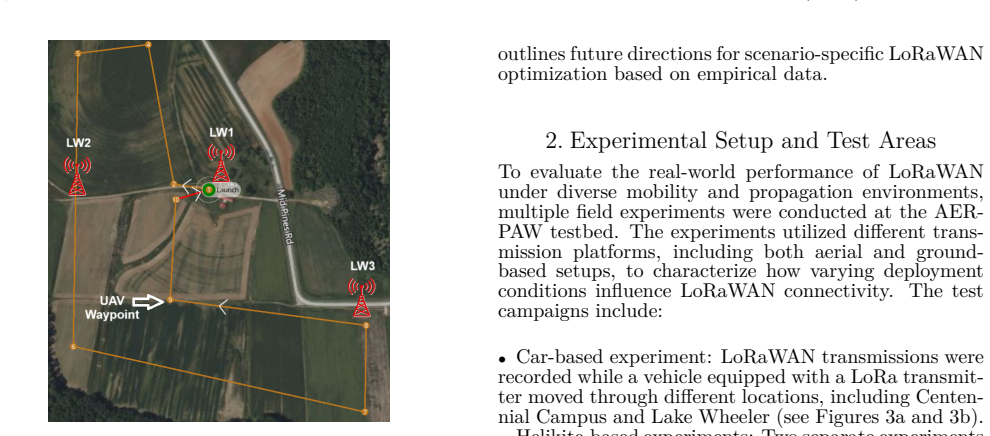
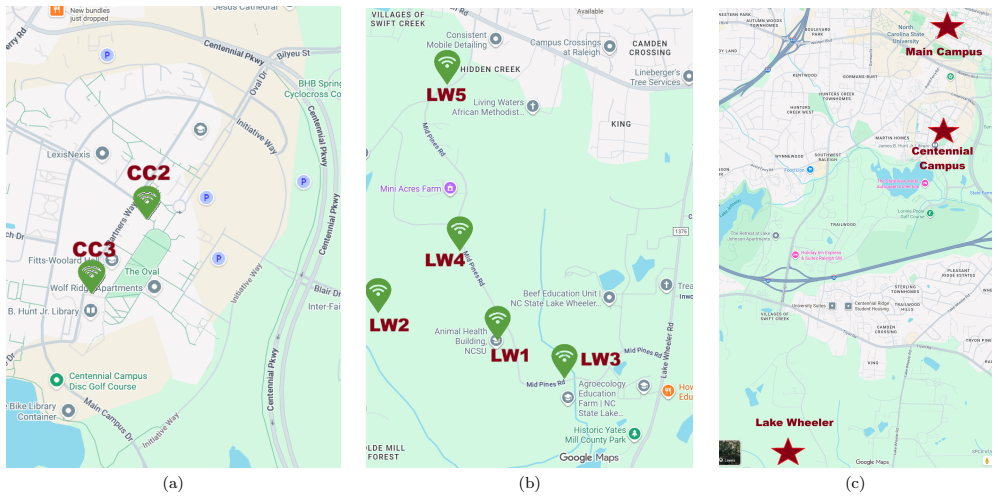
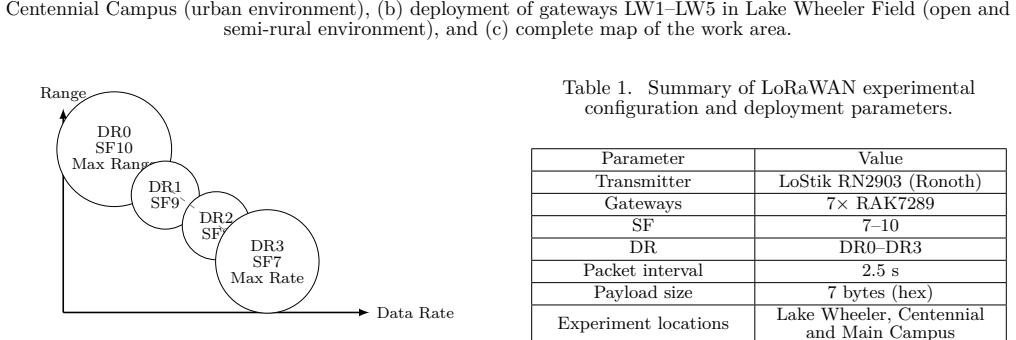
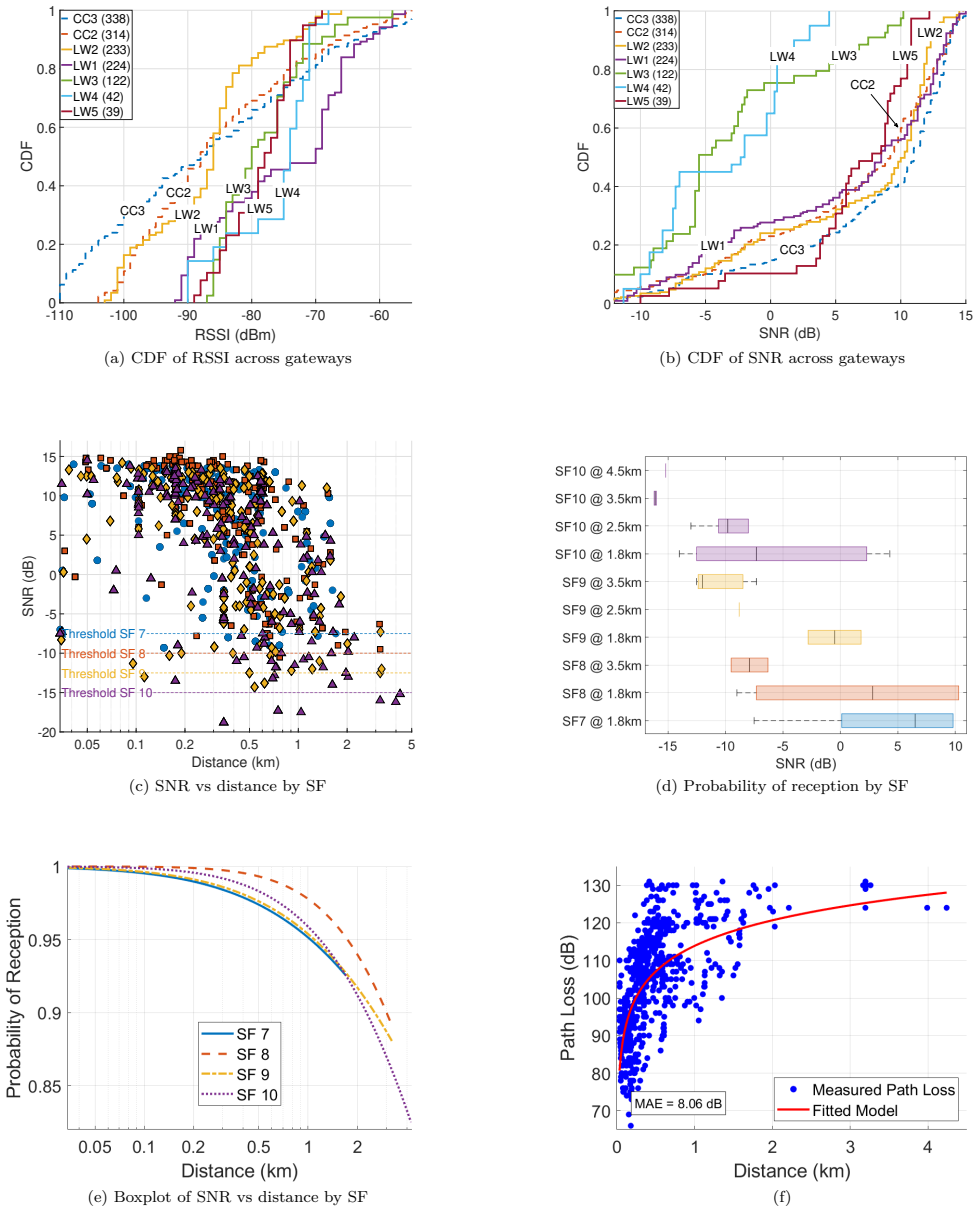
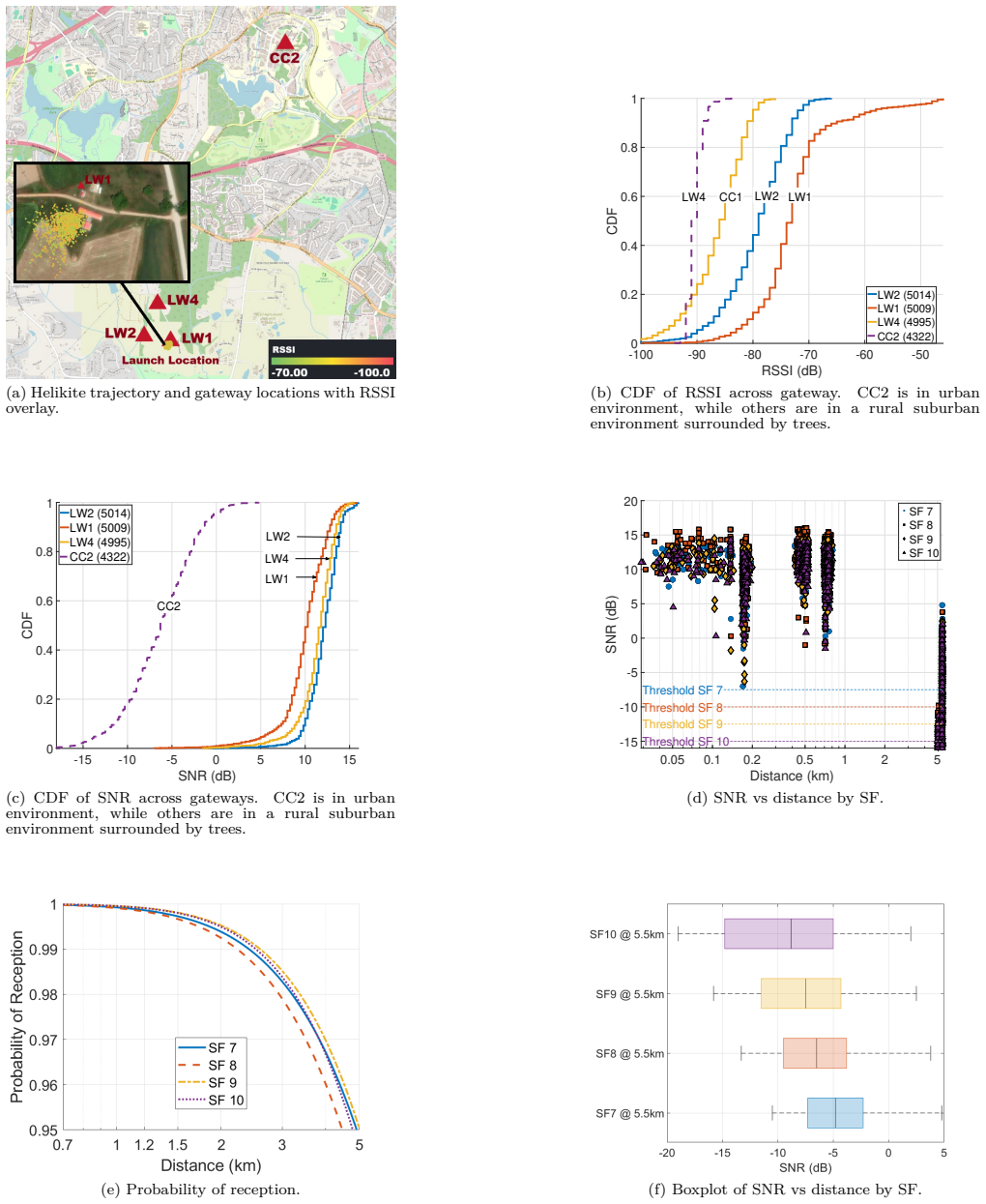
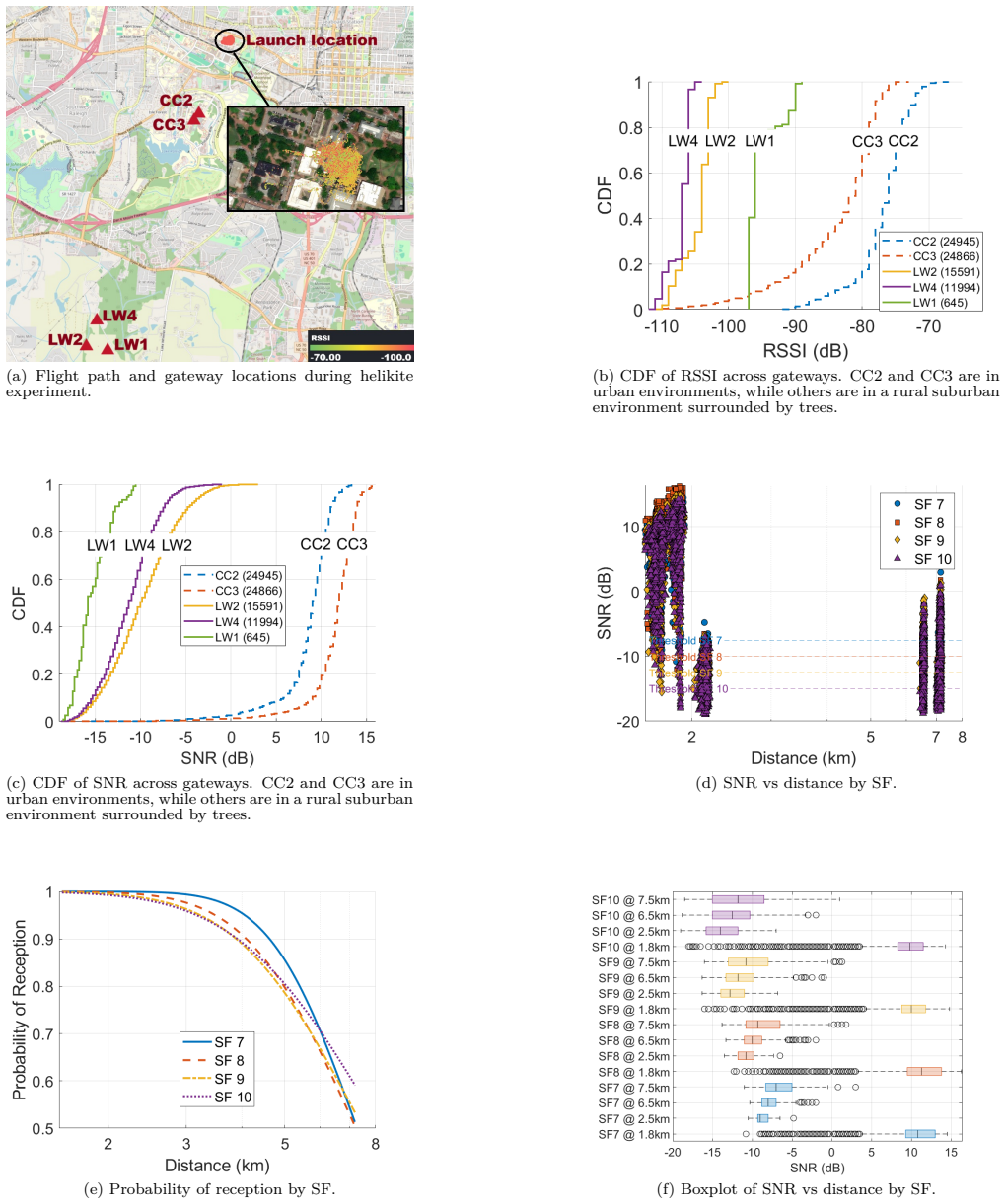
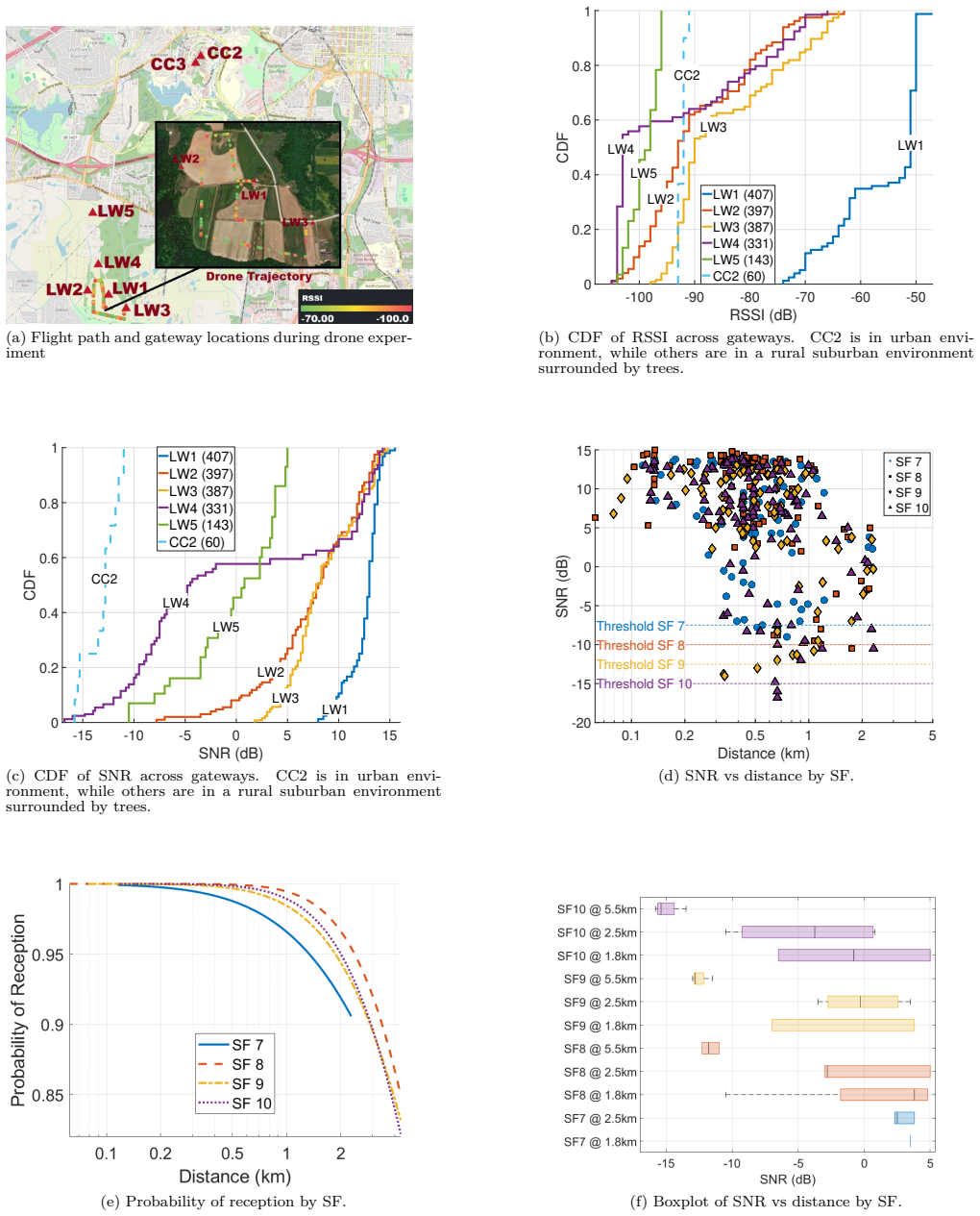
This paper presents a field-based evaluation of Long Range Wide Area Network (LoRaWAN) signal propagation conducted at two locations within the Aerial Experimentation and Research Platform for Advanced Wireless (AERPAW) testbed: Lake Wheeler Field and NC State University's Centennial Campus. Three distinct transmission platforms were deployed, a ground vehicle, a multirotor drone at 50 meters, and a helikite at a steady altitude of 150 meters and 300 meters approximately. These platforms enabled a comparative study on how altitude, mobility, and terrain influence wireless signal reception across a LoRaWAN gateway network. We analyze received signal strength (RSSI) and signal-to-noise ratio (SNR) as functions of distance and spreading factor (SF). Three complementary metrics are visualized: SNR versus distance with demodulation thresholds, probability of successful reception, and SNR boxplots grouped by distance bins. These plots reveal link degradation patterns and demonstrate the role of adaptive SF selection in maintaining communication reliability. To characterize propagation behavior, we apply a log-distance path loss model to empirical data from the ground vehicle experiment, which encompass both rural and urban non-line-of-sight (NLOS) conditions. Model parameters are optimized through error minimization techniques. Our results show that the helikite platform, due to its stable high-altitude position, provided the most reliable and consistent link performance. Conversely, the drone and vehicle exhibited higher variability due to movement, obstructions, and terrain-induced multipath. These findings demonstrate the influence of platform dynamics and altitude on LoRaWAN reception performance, providing support for future aerial network planning efforts.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents field measurements of LoRaWAN performance using three platforms—ground vehicle, drone at 50 m, and helikite at 150-300 m—at two AERPAW testbed sites. It analyzes RSSI and SNR as functions of distance and spreading factor, visualizes metrics like reception probability and boxplots, fits a log-distance path loss model to vehicle data via error minimization, and concludes that the helikite offers the most reliable performance due to its stable altitude while drone and vehicle show higher variability.
Significance. If validated, the empirical comparison of platform effects on LoRaWAN links could inform aerial network deployments for IoT applications. The multi-platform approach and focus on real-world NLOS conditions are positive aspects, though the limited number of sites and lack of statistical rigor reduce the immediate impact.
major comments (3)
- [Abstract] Abstract and results sections: No sample sizes, number of packets transmitted, or error bars/confidence intervals are reported for the RSSI/SNR measurements, boxplots, or reception probability curves, preventing quantitative assessment of the variability claims and platform comparisons.
- [Propagation modeling] Propagation modeling section: The log-distance path loss model is fitted exclusively to the ground-vehicle dataset using error minimization, with no equivalent parameter estimation, validation, or statistical comparison performed on the drone or helikite data despite their central role in the platform performance conclusions.
- [Results and discussion] Results and discussion: The attribution of helikite superiority to stable high altitude (vs. movement and multipath in other platforms) lacks supporting statistical tests (e.g., variance tests or ANOVA on SNR distributions across distance bins) and is based solely on data from two specific AERPAW sites without replication or controls for site-specific terrain effects.
minor comments (3)
- [Abstract] Clarify in the abstract and methods whether the helikite operated at both 150 m and 300 m altitudes in separate flights or if these are approximate values.
- [Figures] Add sample sizes per distance bin to the SNR boxplots and reception probability figures for better interpretability of the empirical trends.
- [Propagation modeling] Include a brief comparison of the fitted path-loss exponent and reference loss to standard LoRaWAN models in the literature.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which help strengthen the manuscript. We address each major comment point by point below.
read point-by-point responses
-
Referee: [Abstract] Abstract and results sections: No sample sizes, number of packets transmitted, or error bars/confidence intervals are reported for the RSSI/SNR measurements, boxplots, or reception probability curves, preventing quantitative assessment of the variability claims and platform comparisons.
Authors: We agree that sample sizes and measures of variability are important for quantitative assessment. In the revised manuscript, we will report the number of packets transmitted for each platform and experiment, and add error bars or confidence intervals to the RSSI/SNR plots, boxplots, and reception probability curves. revision: yes
-
Referee: [Propagation modeling] Propagation modeling section: The log-distance path loss model is fitted exclusively to the ground-vehicle dataset using error minimization, with no equivalent parameter estimation, validation, or statistical comparison performed on the drone or helikite data despite their central role in the platform performance conclusions.
Authors: The log-distance path loss model was applied specifically to the ground-vehicle dataset because it spans both rural and urban NLOS conditions and provides a suitable baseline for propagation characterization. The drone and helikite operate at substantially higher altitudes, which changes the propagation environment (fewer obstructions and multipath effects), so the same model form is not directly comparable without additional modeling assumptions. We will revise the section to explicitly justify this choice and, where the data volume permits, include parameter estimates for the aerial platforms with a brief comparative discussion. revision: partial
-
Referee: [Results and discussion] Results and discussion: The attribution of helikite superiority to stable high altitude (vs. movement and multipath in other platforms) lacks supporting statistical tests (e.g., variance tests or ANOVA on SNR distributions across distance bins) and is based solely on data from two specific AERPAW sites without replication or controls for site-specific terrain effects.
Authors: We will add statistical tests (e.g., Levene’s test for equality of variances or ANOVA on SNR values across distance bins) to quantify the platform differences in variability. The experiments were performed only at the two available AERPAW sites (Lake Wheeler Field and Centennial Campus); we will explicitly acknowledge this limitation and its implications for generalizability in the revised discussion. revision: partial
- Additional replication at other sites or with explicit terrain controls is not feasible, as the measurements were conducted exclusively at the two AERPAW locations using the available testbed infrastructure.
Circularity Check
No significant circularity in derivation chain
full rationale
The paper's primary claims regarding helikite superiority in link consistency derive directly from independent empirical measurements of RSSI, SNR, reception probability, and variability across platforms at the AERPAW sites. The log-distance path loss model is fitted exclusively to ground-vehicle data via error minimization and is not used to derive, predict, or substitute for the aerial-platform comparisons. No self-citations, uniqueness theorems, ansatzes, or self-definitional reductions appear in the abstract or described methods that load-bear the central results. The modeling step is a separate characterization of one dataset and does not reduce the comparative findings to its own inputs by construction.
Axiom & Free-Parameter Ledger
free parameters (1)
- Path-loss exponent and reference loss =
Not numerically stated in abstract
axioms (1)
- domain assumption Log-distance path loss model is a suitable description of signal attenuation in the tested rural and urban NLOS environments
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
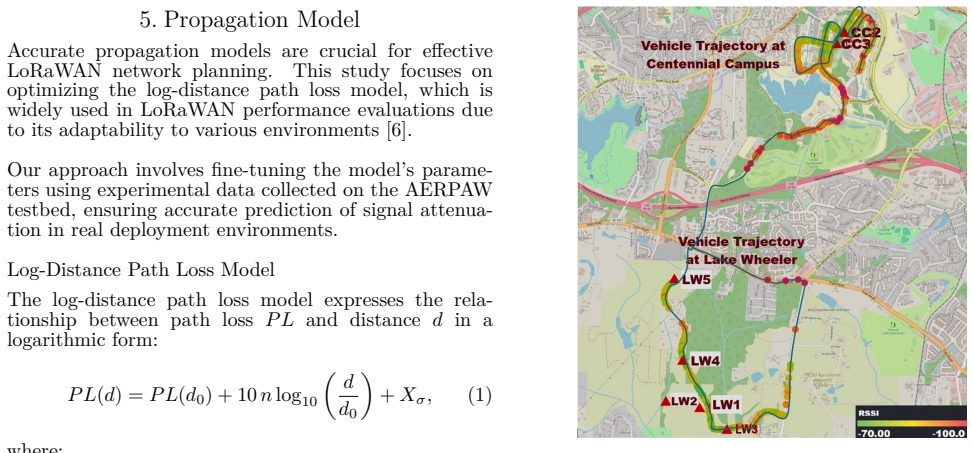
To characterize propagation behavior, we apply a log-distance path loss model to empirical data from the ground vehicle experiment... Model parameters are optimized through error minimization techniques.
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Our results show that the helikite platform, due to its stable high-altitude position, provided the most reliable and consistent link performance.
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Semtech Corporation, “What is LoRa?” 2024. [Online]. A vailable: https://www.semtech.com/ lora/what-is-lora
work page 2024
-
[2]
——, “What is LoRaW AN?” 2024. [On- line]. A vailable: https://www.semtech.com/lora/ lorawan-standard
work page 2024
- [3]
- [4]
-
[5]
A vailable: https://www.microchip
[Online]. A vailable: https://www.microchip. com/wwwproducts/en/RN2903
- [6]
-
[7]
[Online]. A vailable: https:// resources.lora-alliance.org/technical-specifications/ ts001-1-0-4-lorawan-l2-1-0-4-specification
-
[8]
Comparing and adapting propagation models for LoRa networks,
O. Dieng, C. Pham, and O. Thiare, “Comparing and adapting propagation models for LoRa networks,” in International Conference on Wireless and Mobile Computing, Networking and Communications, vol. 2020-October, 2020
work page 2020
-
[9]
Per- formance Evaluation of Propagation Models for LoRaW AN in an Urban Environment,
W. Ingabire, H. Larijani, and R. M. Gibson, “Per- formance Evaluation of Propagation Models for LoRaW AN in an Urban Environment,” in 2nd International Conference on Electrical, Communi- cation and Computer Engineering, ICECCE 2020. Institute of Electrical and Electronics Engineers Inc., 6 2020
work page 2020
-
[10]
Trace- driven simulation of LoRaW AN air channel propa- gation in an urban scenario,
E. Harinda, H. Larijani, and R. M. Gibson, “Trace- driven simulation of LoRaW AN air channel propa- gation in an urban scenario,” Advances in Science, Technology and Engineering Systems, vol. 5, no. 6, pp. 211–220, 2020. 11 (a) Flight path and gateway locations during drone exper- iment -100 -90 -80 -70 -60 -50 RSSI (dB) 0 0.2 0.4 0.6 0.8 1 CDF LW1 (407) ...
work page 2020
-
[11]
Investigation of the LoRa Transceiver in Conditions of Multipath Propagation of Radio Signals,
D. Kucherov, A. Berezkin, V. Nakonechnyi, O. Sushchenko, I. Ogirko, O. Ogirko, and R. Skrynkovskyy, “Investigation of the LoRa Transceiver in Conditions of Multipath Propagation of Radio Signals,” Advances in Science, Technology and Engineering Systems Journal, vol. 6, no. 1, pp. 1106–1111, 2 2021
work page 2021
-
[12]
LoRa Technology Propagation Models for IoT Network Planning in the Amazon Regions,
W. G. Lima, A. V. Lopes, C. M. Cardoso, J. P. Araújo, M. C. Neto, M. E. Tostes, A. A. Nasci- mento, M. Rodriguez, and F. J. Barros, “LoRa Technology Propagation Models for IoT Network Planning in the Amazon Regions,” Sensors, vol. 24, no. 5, 3 2024
work page 2024
-
[13]
Known and unknown facts of lora: Experiences from a large-scale measurement study,
J. C. Liando, A. Gamage, A. W. Tengourtius, and M. Li, “Known and unknown facts of lora: Experiences from a large-scale measurement study,” ACM Transactions on Sensor Networks (TOSN), vol. 15, no. 2, pp. 1–35, 2019
work page 2019
-
[14]
Lora performance in rural and suburban areas,
R. R. Matelica, C. A. Schmidt, M. J. Bruno, and J. E. Cousseau, “Lora performance in rural and suburban areas,” in 2025 Argentine Conference on Electronics (CAE). IEEE, 2025, pp. 13–18
work page 2025
-
[15]
Experimental performance evaluation of lorawan: A case study in bangkok,
N. Vatcharatiansakul, P. Tuwanut, and C. Por- navalai, “Experimental performance evaluation of lorawan: A case study in bangkok,” in 2017 14th In- ternational Joint Conference on Computer Science and Software Engineering (JCSSE). IEEE, 2017, pp. 1–4
work page 2017
-
[16]
Citywide lora network deployment and operation: Measurements, analysis, and implications,
S. Tong, J. Wang, J. Yang, Y. Liu, and J. Zhang, “Citywide lora network deployment and operation: Measurements, analysis, and implications,” in Pro- ceedings of the 21st ACM Conference on Embedded Networked Sensor Systems, 2023, pp. 362–375
work page 2023
-
[17]
Performance mea- surement of lora modules for extending smart ap- plications to the things network,
A. Khoury and A. Al-Zoubi, “Performance mea- surement of lora modules for extending smart ap- plications to the things network,” in 2025 5th International Conference on Advances in Electrical, Electronics and Computing Technology (EECT). IEEE, 2025, pp. 1–6
work page 2025
-
[18]
M. Girolami, F. Mavilia, A. Berton, G. Marrocco, and G. M. Bianco, “An experimental dataset for search and rescue operations in avalanche scenarios based on lora technology,” IEEE Access, 2024
work page 2024
-
[19]
A.-M. Drăgulinescu, C. Zamfirescu, S. Halunga, I. Marcu, F. Y. Li, and O. A. Dobre, “Understand- ing lorawan transmissions in harsh environments: A measurement-based campaign through unmanned aerial/surface vehicles,” IEEE Transactions on In- strumentation and Measurement, vol. 73, pp. 1–14, 2024
work page 2024
-
[20]
Measurement of lora signal propagation in urban areas utilizing aerial gateway and ground gateway
Y. Li and L. Dong, “Measurement of lora signal propagation in urban areas utilizing aerial gateway and ground gateway. ”
-
[21]
Movable Type Scripts: Lati- tude/Longitude Distance,
Chris Veness, “Movable Type Scripts: Lati- tude/Longitude Distance,” 2020. [Online]. A vail- able: https://www.movable-type.co.uk/scripts/ geodesy-library.html
work page 2020
-
[22]
Semtech, “Semtech datasheet SX1276. ” [Online]. A vailable: https://www.semtech.com/products/ wireless-rf/lora-connect/sx1276 Biography[ Sergio Vargas Villar received the B.S. in Mechatronics Engineering from the Bolivian Catholic Univer- sity (2015), the M.S. in Industrial Automation and Robotics from the Polytechnic University of Catalonia (2019), and t...
work page 2015
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.