Recognition: unknown
Balancing Functionality and GDPR-Driven Privacy in ISAC Trajectory Sharing
Pith reviewed 2026-05-10 16:46 UTC · model grok-4.3
The pith
Fisher Information Density constraint on ISAC trajectories bounds privacy leakage independently of sensing power and post-processing.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The proposed FID-constrained trajectory sharing framework enforces a local lower bound on estimation uncertainty, which bounds the Privacy Leak Ratio regardless of sensing power or adversarial post-processing and ensures that no trajectory segment can be reconstructed beyond a prescribed accuracy threshold.
What carries the argument
Fisher Information Density (FID) constraint that supplies a local lower bound on estimation uncertainty for privacy guarantees in trajectory sharing.
If this is right
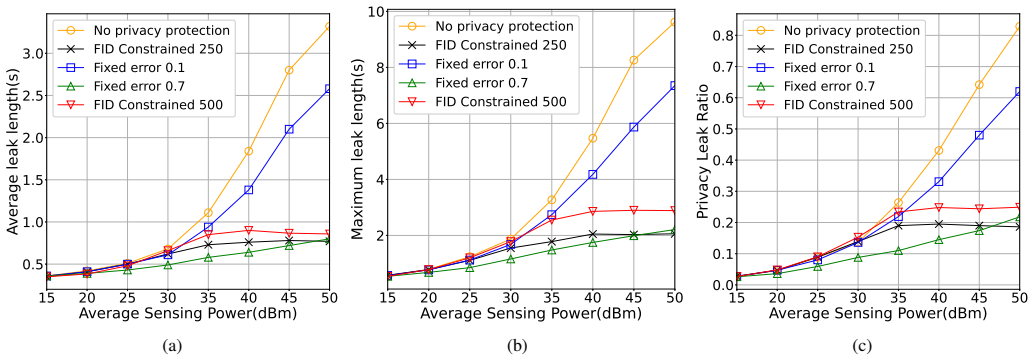
- The average Privacy Leak Ratio remains below 20-25%.
- The maximum leakage segment duration stays under 2-2.5 seconds.
- Utility for movement prediction and other downstream tasks is maintained.
- The approach is model-agnostic and supports GDPR-compliant ISAC designs.
Where Pith is reading between the lines
- The method may facilitate wider use of trajectory sharing in privacy-regulated environments like smart cities.
- Similar constraints could be explored for other shared sensing data types in ISAC systems.
- Real-world validation would test the bound's robustness against actual adversarial algorithms.
Load-bearing premise
Enforcing a local lower bound on estimation uncertainty through Fisher Information Density provides hard privacy guarantees that hold independently of the sensing model and any post-processing by an adversary.
What would settle it
An observation or calculation showing that an adversary can achieve reconstruction accuracy for a trajectory segment better than the prescribed threshold while the FID constraint is in place.
Figures



read the original abstract
Integrated Sensing and Communications (ISAC) enables trajectory sharing that enhances beamforming, resource allocation, and cooperative perception, yet raises fundamental privacy concerns under the General Data Protection Regulation (GDPR) data minimisation principle. This paper proposes a Fisher Information Density (FID)-constrained trajectory sharing framework that enforces a local lower bound on estimation uncertainty, providing hard, quantifiable privacy guarantees by construction. Unlike fixed-noise approaches, the proposed method bounds the Privacy Leak Ratio (PLR) regardless of sensing power or adversarial post-processing, ensuring that no trajectory segment can be reconstructed beyond a prescribed accuracy threshold. Simulations on the OpenTraj dataset demonstrate that the framework keeps the average PLR below 20-25% and the maximum leakage segment duration under 2-2.5 s, while preserving data utility for downstream tasks such as movement prediction. The resulting criterion is interpretable, model-agnostic, and compatible with GDPR-compliant ISAC system design.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a Fisher Information Density (FID)-constrained trajectory sharing framework for Integrated Sensing and Communications (ISAC) to balance functionality with GDPR-driven privacy. It enforces a local lower bound on estimation uncertainty via FID to provide hard privacy guarantees, claiming to bound the Privacy Leak Ratio (PLR) independently of sensing power and adversarial post-processing. This ensures no trajectory segment can be reconstructed beyond a prescribed accuracy threshold. Simulations using the OpenTraj dataset indicate that the framework maintains average PLR below 20-25% and maximum leakage segment duration under 2-2.5 seconds, while preserving utility for downstream tasks such as movement prediction. The criterion is described as interpretable and model-agnostic.
Significance. If the result holds, particularly the model-agnostic hard bounds on PLR that are independent of adversarial capabilities, the paper would offer a significant contribution to the design of privacy-compliant ISAC systems. It addresses the tension between sensing utility and data minimisation under GDPR by providing a quantifiable, construction-based guarantee. The simulation outcomes on real-world trajectory data further support its potential practical impact, though the strength depends on validating the extension beyond local CRB bounds.
major comments (2)
- [Abstract] The central claim that the FID constraint 'bounds the Privacy Leak Ratio (PLR) regardless of sensing power or adversarial post-processing' is not accompanied by a derivation or proof sketch establishing invariance under arbitrary post-processing. The Cramer-Rao bound provides a local lower bound on variance for unbiased estimators in a given model, but does not inherently cap reconstruction accuracy after an adversary applies different estimators, integrates information over time, or uses side information.
- [Results and Simulations] The OpenTraj simulation results report average PLR below 20-25% and max leakage under 2-2.5 s but omit error bars, comparisons against baselines such as fixed-noise addition or differential privacy methods, and criteria for trajectory inclusion or exclusion. This makes it challenging to assess whether the bounds are robust or specific to the chosen scenarios.
minor comments (2)
- Define all acronyms (e.g., ISAC, FID, PLR) upon their first appearance in the text.
- [Framework Description] Include explicit equations for the FID constraint and the computation of PLR to allow readers to follow the construction of the privacy guarantee.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments on our manuscript. These observations highlight important aspects of our claims and empirical evaluation that we will address in the revision. Below we respond point-by-point to the major comments.
read point-by-point responses
-
Referee: [Abstract] The central claim that the FID constraint 'bounds the Privacy Leak Ratio (PLR) regardless of sensing power or adversarial post-processing' is not accompanied by a derivation or proof sketch establishing invariance under arbitrary post-processing. The Cramer-Rao bound provides a local lower bound on variance for unbiased estimators in a given model, but does not inherently cap reconstruction accuracy after an adversary applies different estimators, integrates information over time, or uses side information.
Authors: We acknowledge that the abstract statement would be strengthened by an explicit derivation. The FID constraint is applied directly to the shared trajectory data and enforces a local lower bound on estimation uncertainty via the Fisher information density. Because PLR is defined in terms of the minimum achievable reconstruction error (lower-bounded by the CRB under the constrained model), the bound is independent of the sensing power used to acquire the data. For post-processing, any estimator—biased or unbiased—operating on the shared data cannot extract more information than the FID permits; time integration is likewise limited because the cumulative Fisher information remains bounded by the per-segment constraint. We will add a concise proof sketch (new subsection in the theoretical analysis) that formalizes this invariance under arbitrary post-processing while noting the standard CRB assumptions and the model-agnostic nature of the FID criterion. We will also clarify the handling of side information as an open extension. revision: yes
-
Referee: [Results and Simulations] The OpenTraj simulation results report average PLR below 20-25% and max leakage under 2-2.5 s but omit error bars, comparisons against baselines such as fixed-noise addition or differential privacy methods, and criteria for trajectory inclusion or exclusion. This makes it challenging to assess whether the bounds are robust or specific to the chosen scenarios.
Authors: We agree that the simulation section would benefit from greater transparency and comparative context. In the revised manuscript we will (i) include error bars (standard deviation across runs) on all reported PLR and leakage-duration statistics, (ii) add direct comparisons against fixed-noise addition and differential-privacy baselines using the same OpenTraj trajectories and utility metrics, and (iii) explicitly state the trajectory inclusion criteria (minimum length, sampling frequency, and exclusion of incomplete or low-quality segments). These additions will allow readers to evaluate robustness more readily. revision: yes
Circularity Check
No significant circularity in derivation chain
full rationale
The provided abstract and context describe a FID-constrained framework that defines new quantities (FID, PLR) to enforce a local lower bound on estimation uncertainty via the Cramer-Rao bound, then claims this yields model-agnostic privacy guarantees by construction. No equations, self-citations, or derivation steps are quoted that reduce the central bound to a fitted parameter, self-definition, or prior author result. The claim of independence from sensing model and post-processing is presented as following from the metric choice rather than being presupposed by it. This is a normal non-finding: the derivation remains self-contained against external benchmarks such as the CRB, with the central result retaining independent content from the input definitions.
Axiom & Free-Parameter Ledger
free parameters (1)
- FID lower bound threshold
axioms (1)
- standard math Fisher Information quantifies the amount of information that an observable random variable carries about an unknown parameter
invented entities (1)
-
Privacy Leak Ratio (PLR)
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Temporal-assisted beamforming and trajectory prediction in sensing-enabled uav communications,
S. Zhou, H. Yang, L. Xianget al., “Temporal-assisted beamforming and trajectory prediction in sensing-enabled uav communications,”IEEE Transactions on Communications, vol. 73, no. 7, pp. 5408–5419, 2024
work page 2024
-
[2]
Cooperative sensing-assisted predictive beam tracking for mimo-ofdm networked isac systems,
X. Yang, Z. Wei, J. Xuet al., “Cooperative sensing-assisted predictive beam tracking for mimo-ofdm networked isac systems,”IEEE Transac- tions on Wireless Communications, 2025
work page 2025
-
[3]
Attention-based spatial-temporal gcn for sensing-aided beam prediction in ris-assisted isac systems,
J. Li, W. Wang, R. Jianget al., “Attention-based spatial-temporal gcn for sensing-aided beam prediction in ris-assisted isac systems,”IEEE Transactions on Cognitive Communications and Networking, 2026
work page 2026
-
[4]
X. Li, Y . Gao, M. Zenget al., “Recent advances in resource alloca- tion and beam prediction for large language models empowered isac systems,”IEEE Communications Magazine, 2026
work page 2026
-
[5]
Goal-oriented semantic communication for isac-enabled robotic obstacle avoidance,
W. Liu, Y . Deng, and H. Wymeersch, “Goal-oriented semantic communication for isac-enabled robotic obstacle avoidance,” 2026. [Online]. Available: https://arxiv.org/abs/2603.02291
-
[6]
Isac-assisted collision avoidance mechanism for vehicle-to-infrastructure systems,
Z. Ye, C. Yu, H. Zhuet al., “Isac-assisted collision avoidance mechanism for vehicle-to-infrastructure systems,”IEEE Transactions on Intelligent V ehicles, 2024
work page 2024
-
[7]
Collaborative positioning optimization for multiple moving users in uav-enabled isac,
Y . Hu, X. Zhuo, Z. Menget al., “Collaborative positioning optimization for multiple moving users in uav-enabled isac,”IEEE Transactions on Cognitive Communications and Networking, 2025
work page 2025
-
[8]
Joint radar and communi- cation design: Applications, state-of-the-art, and the road ahead,
F. Liu, C. Masouros, A. P. Petropuluet al., “Joint radar and communi- cation design: Applications, state-of-the-art, and the road ahead,”IEEE Transactions on Communications, vol. 68, no. 6, pp. 3834–3862, 2020
work page 2020
-
[9]
C. Liu, M. Xia, J. Zhaoet al., “Optimal resource allocation for integrated sensing and communications in internet of vehicles: A deep reinforce- ment learning approach,”IEEE Transactions on V ehicular Technology, vol. 74, no. 2, pp. 3028–3038, 2025
work page 2025
-
[10]
Respec: A super-resolution algorithm for multi-target sensing in ofdm-isac systems,
M. Yin, J. Li, Q. Liet al., “Respec: A super-resolution algorithm for multi-target sensing in ofdm-isac systems,” in2025 IEEE Wireless Communications and Networking Conference (WCNC), 2025, pp. 1–6
work page 2025
-
[11]
Joint beamforming for multi-target detection and multi-user communication in isac systems,
Z. Zhao, Z. Liu, R. Jianget al., “Joint beamforming for multi-target detection and multi-user communication in isac systems,”IEEE Trans- actions on V ehicular Technology, vol. 74, no. 9, pp. 14 938–14 942, 2025
work page 2025
-
[12]
Performance trade-off for ultra-reliable and low-latency service in multi-functional isac network,
Z. Liu, Y . Zhu, Y . Huet al., “Performance trade-off for ultra-reliable and low-latency service in multi-functional isac network,”IEEE Transactions on Network Science and Engineering, pp. 1–19, 2026
work page 2026
-
[13]
Z. Ren, Y . Peng, X. Songet al., “Fundamental crb-rate tradeoff in multi-antenna isac systems with information multicasting and multi- target sensing,”IEEE Transactions on Wireless Communications, vol. 23, no. 4, pp. 3870–3885, 2024
work page 2024
-
[14]
Unauthorized radio sensing and privacy risks: A sampling error-based defense,
Z. Fang, B. Han, W. Chenet al., “Unauthorized radio sensing and privacy risks: A sampling error-based defense,” in2025 IEEE 36th International Symposium on Personal, Indoor and Mobile Radio Com- munications (PIMRC), 2025, pp. 1–6
work page 2025
-
[15]
Opentraj: Assessing prediction complexity in human trajectories datasets,
J. Amirian, B. Zhang, F. V . Castroet al., “Opentraj: Assessing prediction complexity in human trajectories datasets,” inComputer Vision – ACCV 2020, H. Ishikawa, C.-L. Liu, T. Pajdlaet al., Eds. Cham: Springer International Publishing, 2021, pp. 566–582
work page 2020
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.