Optimal Privacy-Aware Co-Design of Quantizer and Controller in Networked Control Systems
Pith reviewed 2026-05-10 18:07 UTC · model grok-4.3
The pith
Optimal quantizer and controller designs for networked control systems emerge from solving a stochastic control problem regularized by mutual information to limit privacy leakage.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The optimal privacy-aware quantizer and controller are obtained by solving a stochastic control problem with mutual information regularization, where the mutual information measures the privacy leakage through the quantizer and controller. The authors first derive the coupled Bellman equations for the optimal quantizer and controller using the dynamic programming decomposition method. They then analyze the structural properties of the solution, showing that the optimal controller is deterministic, while the optimal quantizer regulates the adversary's belief in a closed-loop manner to enhance privacy. To enable numerical optimization, the quantizer and controller are jointly parameterized and
What carries the argument
A stochastic control problem regularized by the mutual information between the private input process and the pair of quantization outputs plus control outputs, solved via coupled Bellman equations from dynamic programming decomposition.
If this is right
- The optimal controller takes a deterministic form that minimizes a combined cost including control performance and privacy penalty.
- The quantizer operates by regulating the adversary's posterior belief about the private input in a closed-loop fashion.
- Joint parameterization of quantizer and controller allows policy gradient methods to find numerical solutions.
- A binary classification approximation can estimate the mutual information privacy leakage term.
- The designs improve privacy in applications such as building control systems without excessive performance loss.
Where Pith is reading between the lines
- Similar co-design methods could extend to systems where the adversary has partial or noisy observations of the control outputs.
- If the mutual information measure underestimates leakage to sophisticated adversaries, the resulting designs may still provide partial protection but require additional safeguards.
- The closed-loop belief regulation property of the quantizer suggests potential for adaptive privacy mechanisms in time-varying environments.
Load-bearing premise
Mutual information between the private inputs and the observed quantization and control outputs fully captures the privacy leakage that a realistic adversary could achieve, and the designer knows the exact system dynamics, noise distributions, and adversary observation model.
What would settle it
A simulation or experiment in which an adversary using inference methods beyond those captured by mutual information extracts substantially more information about the private inputs than the regularized design predicts, while the system performance remains as expected.
Figures






read the original abstract
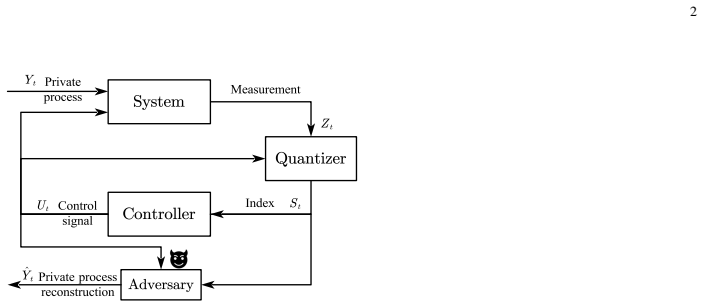
This paper investigates the optimal privacy-aware networked control problem, in which the dynamical system affected by a private input process sends its measurement to a remote controller after stochastic quantization. An adversary seeks to infer private system inputs from quantization results and control outputs. The optimal privacy-aware quantizer and controller are obtained by solving a stochastic control problem with mutual information regularization, where the mutual information measures the privacy leakage through the quantizer and controller. We first derive the coupled Bellman equations for the optimal quantizer and controller using the dynamic programming decomposition method. We then analyze the structural properties of the solution, showing that the optimal controller is deterministic, while the optimal quantizer regulates the adversary's belief in a closed-loop manner to enhance privacy. To enable numerical optimization, the quantizer and controller are jointly parameterized and then updated via policy gradient methods, and a binary classification approach is used to approximate privacy leakage. Finally, we validate the effectiveness of the proposed approach through numerical experiments on a building control system.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. This paper addresses the co-design of quantizers and controllers in networked control systems to achieve optimal performance while preserving privacy against adversaries inferring private inputs from quantized measurements and control signals. The approach formulates the problem as a stochastic control task with mutual information regularization, derives coupled Bellman equations via dynamic programming, proves that the optimal controller is deterministic and the quantizer regulates the adversary's belief in closed-loop, and implements a numerical solution by parameterizing the policies and using policy gradients with a binary classifier to estimate the privacy leakage term, demonstrated on a building control system.
Significance. Should the derivations of the Bellman equations and structural properties hold, and the numerical method accurately optimize the intended objective, this work offers a significant contribution to privacy-aware control design by providing both theoretical structure and a practical optimization framework for networked systems where privacy leakage is a concern.
major comments (2)
- [Numerical optimization section] Section on numerical optimization (policy gradient with binary classification): The binary classification approach used to approximate the mutual information privacy leakage term lacks error bounds, bias analysis, or comparison to consistent estimators such as MINE. Because mutual information is a global non-additive functional of the joint trajectory distribution, this surrogate must faithfully track the true I(private inputs; quant+control outputs) for the gradient updates to converge to the solution of the coupled Bellman equations; without such validation the reported policies may optimize a distorted objective rather than the intended MI-regularized cost.
- [Dynamic programming decomposition section] Dynamic programming decomposition section: The derivation of the coupled Bellman equations for the joint quantizer-controller optimization is asserted but the manuscript provides insufficient step-by-step details on the decomposition and the handling of the mutual information term within the value functions, making independent verification of the claimed structural properties (deterministic controller, closed-loop belief regulation) difficult.
minor comments (2)
- [Abstract] Abstract: The description of the binary classification approach to approximate privacy leakage should briefly specify the classifier architecture, training procedure, and how it is embedded in the policy gradient estimator for clarity.
- [Numerical experiments section] Numerical experiments section: The building control system example would benefit from explicit reporting of system matrices, noise statistics, adversary observation model, and the value of the mutual information regularization weight to support reproducibility of the numerical results.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive feedback on our manuscript. We address each of the major comments below and outline the revisions we plan to make to strengthen the paper.
read point-by-point responses
-
Referee: [Numerical optimization section] Section on numerical optimization (policy gradient with binary classification): The binary classification approach used to approximate the mutual information privacy leakage term lacks error bounds, bias analysis, or comparison to consistent estimators such as MINE. Because mutual information is a global non-additive functional of the joint trajectory distribution, this surrogate must faithfully track the true I(private inputs; quant+control outputs) for the gradient updates to converge to the solution of the coupled Bellman equations; without such validation the reported policies may optimize a distorted objective rather than the intended MI-regularized cost.
Authors: We appreciate the referee's concern regarding the approximation of the mutual information term. The binary classification method is used to provide a differentiable estimate of the privacy leakage for policy gradient optimization. While the manuscript does not provide theoretical error bounds or a comparison to MINE, the approach is motivated by its computational efficiency and has been validated through the numerical experiments showing effective privacy-performance trade-offs. To address this, we will revise the numerical optimization section to include an analysis of the estimator's bias and variance, along with a comparison to MINE on the building control example. This will demonstrate that the surrogate sufficiently tracks the true mutual information for the purposes of optimization. revision: yes
-
Referee: [Dynamic programming decomposition section] Dynamic programming decomposition section: The derivation of the coupled Bellman equations for the joint quantizer-controller optimization is asserted but the manuscript provides insufficient step-by-step details on the decomposition and the handling of the mutual information term within the value functions, making independent verification of the claimed structural properties (deterministic controller, closed-loop belief regulation) difficult.
Authors: We agree that more detailed exposition of the dynamic programming decomposition would aid in verifying the results. The derivation involves applying the principle of optimality to the joint problem, separating the quantizer and controller decisions, and incorporating the mutual information as an additive term in the cost that depends on the joint distribution. The structural properties are proven by showing that the optimal controller policy does not depend on randomization and that the quantizer can be chosen to minimize the information leakage given the closed-loop dynamics. In the revised manuscript, we will provide a more comprehensive step-by-step derivation of the coupled Bellman equations, explicitly detailing how the mutual information term is handled within the value functions, and include additional explanations for the structural properties. revision: yes
Circularity Check
No circularity; derivation applies standard DP to regularized objective with explicit numerical approximation
full rationale
The paper states it derives coupled Bellman equations for the MI-regularized stochastic control problem via dynamic programming decomposition, then analyzes structural properties (optimal controller deterministic, quantizer regulates belief in closed loop). Numerical solution is described separately as joint parameterization updated by policy gradient with binary classification to approximate the privacy leakage term. No quoted step reduces the claimed Bellman equations or optimality result to a fitted parameter or self-citation by construction; the approximation is presented transparently as an enabling technique rather than an exact derivation. The approach remains self-contained against the model assumptions and is checked via numerical experiments on a building control system, with no load-bearing self-referential reductions.
Axiom & Free-Parameter Ledger
free parameters (1)
- mutual information regularization weight
axioms (1)
- domain assumption Mutual information between private inputs and (quantized measurements, control outputs) is an appropriate and complete measure of privacy leakage to the adversary.
Reference graph
Works this paper leans on
-
[1]
Blind identification strategies for room occupancy estimation,
A. Ebadat, G. Bottegal, D. Varagnolo, B. Wahlberg, H. Hjalmarsson, and K. H. Johansson, “Blind identification strategies for room occupancy estimation,” in2015 European control conference (ECC), pp. 1315–1320, IEEE, 2015
work page 2015
-
[2]
A comprehensive review of approaches to building occupancy detection,
L. Rueda, K. Agbossou, A. Cardenas, N. Henao, and S. Kelouwani, “A comprehensive review of approaches to building occupancy detection,”Building and Environment, vol. 180, p. 106966, 2020. 11
work page 2020
-
[3]
Differential privacy: A survey of results,
C. Dwork, “Differential privacy: A survey of results,” inInternational conference on theory and applications of models of computation, pp. 1–19, Springer, 2008
work page 2008
-
[4]
An overview of information-theoretic security and privacy: Metrics, limits and applications,
M. Bloch, O. G ¨unl¨u, A. Yener, F. Oggier, H. V . Poor, L. Sankar, and R. F. Schaefer, “An overview of information-theoretic security and privacy: Metrics, limits and applications,”IEEE Journal on Selected Areas in Information Theory, vol. 2, no. 1, pp. 5–22, 2021
work page 2021
-
[5]
Differentially private filtering,
J. Le Ny and G. J. Pappas, “Differentially private filtering,”IEEE Transactions on Automatic Control, vol. 59, no. 2, pp. 341–354, 2013
work page 2013
-
[6]
On the cost of differential privacy in distributed control systems,
Z. Huang, Y . Wang, S. Mitra, and G. E. Dullerud, “On the cost of differential privacy in distributed control systems,” inProceedings of the 3rd international conference on High confidence networked systems, pp. 105–114, 2014
work page 2014
-
[7]
Y . Wang, Z. Huang, S. Mitra, and G. E. Dullerud, “Differential privacy in linear distributed control systems: Entropy minimizing mechanisms and performance tradeoffs,”IEEE Transactions on Control of Network Systems, vol. 4, no. 1, pp. 118–130, 2017
work page 2017
-
[8]
X. Chen, L. Huang, L. He, S. Dey, and L. Shi, “A differentially private method for distributed optimization in directed networks via state decomposition,” IEEE Transactions on Control of Network Systems, vol. 10, no. 4, pp. 2165–2177, 2023
work page 2023
-
[9]
Information-theoretic approaches to privacy in estimation and control,
E. Nekouei, T. Tanaka, M. Skoglund, and K. H. Johansson, “Information-theoretic approaches to privacy in estimation and control,”Annual Reviews in Control, vol. 47, pp. 412–422, 2019
work page 2019
-
[10]
Directed information and privacy loss in cloud-based control,
T. Tanaka, M. Skoglund, H. Sandberg, and K. H. Johansson, “Directed information and privacy loss in cloud-based control,” in2017 American control conference (ACC), pp. 1666–1672, IEEE, 2017
work page 2017
-
[11]
Information-theoretic privacy for smart metering systems with a rechargeable battery,
S. Li, A. Khisti, and A. Mahajan, “Information-theoretic privacy for smart metering systems with a rechargeable battery,”IEEE Transactions on Information Theory, vol. 64, no. 5, pp. 3679–3695, 2018
work page 2018
-
[12]
Smoother entropy for active state trajectory estimation and obfuscation in pomdps,
T. L. Molloy and G. N. Nair, “Smoother entropy for active state trajectory estimation and obfuscation in pomdps,”IEEE Transactions on Automatic Control, vol. 68, no. 6, pp. 3557–3572, 2023
work page 2023
-
[13]
A pomdp extension with belief-dependent rewards,
M. Araya, O. Buffet, V . Thomas, and F. Charpillet, “A pomdp extension with belief-dependent rewards,”Advances in neural information processing systems, vol. 23, pp. 64–72, 2010
work page 2010
-
[14]
W. Zhang, B. Jiang, M. Li, and X. Lin, “Privacy-preserving aggregate mobility data release: An information-theoretic deep reinforcement learning approach,”IEEE Transactions on Information Forensics and Security, vol. 17, pp. 849–864, 2022
work page 2022
-
[15]
On the foundations of quantitative information flow,
G. Smith, “On the foundations of quantitative information flow,” inInternational Conference on Foundations of Software Science and Computational Structures, pp. 288–302, Springer, 2009
work page 2009
-
[16]
An operational approach to information leakage,
I. Issa, A. B. Wagner, and S. Kamath, “An operational approach to information leakage,”IEEE Transactions on Information Theory, vol. 66, no. 3, pp. 1625–1657, 2019
work page 2019
-
[17]
S. Saeidian, G. Cervia, T. J. Oechtering, and M. Skoglund, “Pointwise maximal leakage,”IEEE Transactions on Information Theory, 2023
work page 2023
-
[18]
F. P. Calmon, M. Varia, M. M ´edard, M. M. Christiansen, K. R. Duffy, and S. Tessaro, “Bounds on inference,” in2013 51st Annual Allerton Conference on Communication, Control, and Computing (Allerton), pp. 567–574, IEEE, 2013
work page 2013
-
[19]
T. M. Cover,Elements of information theory. John Wiley & Sons, 1999
work page 1999
-
[20]
Decentralized stochastic control with partial history sharing: A common information approach,
A. Nayyar, A. Mahajan, and D. Teneketzis, “Decentralized stochastic control with partial history sharing: A common information approach,”IEEE Transactions on Automatic Control, vol. 58, no. 7, pp. 1644–1658, 2013
work page 2013
-
[21]
E. Hubbard, L. Cregg, and S. Y ¨uksel, “Reinforcement learning for jointly optimal coding and control policies for a controlled markovian system over a communication channel,”IEEE Transactions on Automatic Control, pp. 1–16, 2026
work page 2026
-
[22]
Krishnamurthy,Partially observed Markov decision processes
V . Krishnamurthy,Partially observed Markov decision processes. Cambridge university press, 2016
work page 2016
-
[23]
M. Thomas and A. T. Joy,Elements of information theory. Wiley-Interscience, 2006
work page 2006
-
[24]
Reinforcement learning and markov decision processes,
M. Otterlo and M. Wiering, “Reinforcement learning and markov decision processes,”Reinforcement Learning: State of the Art, pp. 3–42, 01 2012
work page 2012
-
[25]
Neural estimators for conditional mutual information using nearest neighbors sampling,
S. Molavipour, G. Bassi, and M. Skoglund, “Neural estimators for conditional mutual information using nearest neighbors sampling,”IEEE transactions on signal processing, vol. 69, pp. 766–780, 2021
work page 2021
-
[26]
Discrete variational autoencoders,
J. T. Rolfe, “Discrete variational autoencoders,” inInternational Conference on Learning Representations, 2017. APPENDIXA PROOF OFLEMMA1 To prove Lemma 1, we first show that the mutual information can be expanded into an additive form. Lemma 4.The mutual information term in(7)can be expanded as I ST , U T ;Y T = TX t=1 I St;Y t−1 St−1, U t−1 = TX t=1 E ci...
work page 2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.