Motion planning and approximate controllability of a moving cantilever beam with a tip-mass
Pith reviewed 2026-05-10 15:41 UTC · model grok-4.3
The pith
The moving cantilever joint enables exact state transfers for a beam if initial and final states lie in a set containing all eigenfunctions, establishing approximate controllability.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
We prove that the transfer described above is feasible if the initial and final states belong to a certain set, which also contains the steady-states of the beam model. We then establish that this set contains all the eigenfunctions of the beam model, which form a Riesz basis for the state-space, and thereby conclude the approximate controllability of the beam model over all time intervals.
What carries the argument
Generating functions approach to flatness-based control, extended to the coupled PDE-ODE model whose boundary input is the position of the moving cantilever joint.
If this is right
- Motion planning succeeds exactly when both initial and final states lie in the identified feasible set that contains all steady states.
- Every eigenfunction belongs to that set, so the Riesz-basis property directly yields approximate controllability.
- Approximate controllability holds on every finite time interval.
- The theoretical motion-planning results are confirmed by both numerical simulations and laboratory experiments.
Where Pith is reading between the lines
- The same flatness construction could be tested on other non-uniform beams or plates whose eigenfunctions are known to form Riesz bases.
- If the feasible set can be shown dense in a stronger topology, the argument might upgrade to exact controllability.
- Trajectory generators built from the generating functions could be embedded directly in real-time controllers for robotic arms or sensor platforms.
- The approach supplies a template for proving controllability in other boundary-actuated systems that combine PDEs with tip-mass ODEs.
Load-bearing premise
The generating functions method for flatness extends without obstruction to this coupled PDE-ODE system with boundary input, and the eigenfunctions form a Riesz basis that turns membership in the feasible set into approximate controllability.
What would settle it
An explicit calculation or experiment showing that some eigenfunction cannot be transferred exactly to another state in the feasible set by any admissible joint trajectory.
Figures




read the original abstract
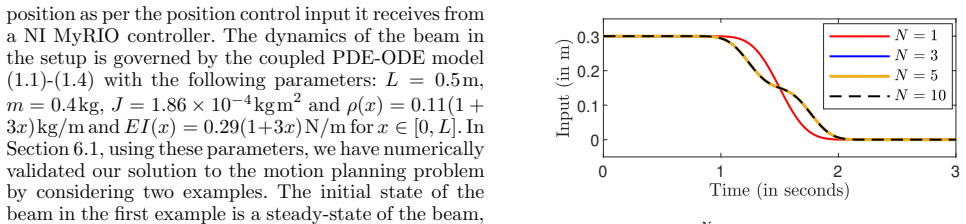
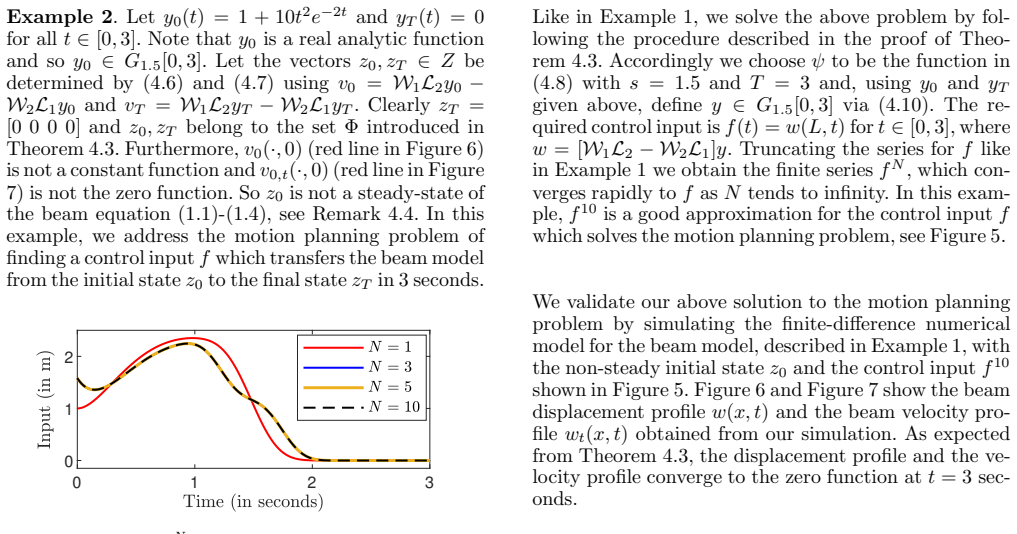
Consider a non-uniform Euler-Bernoulli beam with a tip-mass at one end and a cantilever joint at the other end. The cantilever joint is not fixed and can itself be moved along an axis perpendicular to the beam. The position of the cantilever joint is the control input to the beam. The dynamics of the beam is governed by a coupled PDE-ODE model with boundary input. On a natural state-space, there exists a unique state trajectory for this beam model for every initial state and each twice continuously differentiable control input which is compatible with the initial state. In this paper, we study the motion planning problem of transferring the beam model from an initial state to a final state over a prescribed time-interval and then employ the results obtained to establish the approximate controllability of this model. We address these problems by extending and applying the generating functions approach to flatness-based control to the beam model. We prove that the transfer described above is feasible if the initial and final states belong to a certain set, which also contains the steady-states of the beam model. We then establish that this set contains all the eigenfunctions of the beam model, which form a Riesz basis for the state-space, and thereby conclude the approximate controllability of the beam model over all time intervals. We illustrate our theoretical results on motion planning using simulations and experiments.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript studies a non-uniform Euler-Bernoulli beam with tip mass whose cantilever base position serves as boundary control input, yielding a coupled PDE-ODE system. It first asserts existence and uniqueness of trajectories for every initial state and compatible C² control. It then extends the generating-functions approach to flatness-based control to solve the motion-planning problem of steering between initial and final states belonging to a feasible set S (which contains all steady states). The paper shows that every eigenfunction of the spatial operator lies in S; since these eigenfunctions form a Riesz basis of the state space, it concludes approximate controllability on every finite time interval. The claims are illustrated by simulations and experiments.
Significance. If the flatness extension is rigorously justified, the work supplies a constructive motion-planning procedure together with an approximate-controllability result for a non-uniform beam with moving base, both of which are of interest in flexible robotics and structural control. The methodological step of embedding the Riesz basis inside the flatness-feasible set S to obtain density is clean and leverages standard spectral theory.
major comments (2)
- [§3] §3 (extension of generating-functions flatness): the manuscript asserts that the method extends without obstruction to the variable-coefficient non-uniform beam and that every eigenfunction therefore belongs to the feasible set S, yet supplies no explicit series construction, differential relations for the flat output, or convergence argument in the energy space that would confirm the resulting control remains C² when the initial datum is an eigenmode. This step is load-bearing for the density claim used in controllability.
- [§4] §4 (approximate controllability): the deduction that membership of the Riesz basis in S implies approximate controllability over arbitrary intervals is formally correct once the membership is established, but the membership itself rests on the un-detailed flatness construction for the coupled PDE-ODE system with position-dependent coefficients; without that verification the controllability conclusion cannot be regarded as fully supported.
minor comments (2)
- The precise definition of the feasible set S and the Hilbert space on which the Riesz-basis property is stated could be recalled explicitly in the introduction for readers who skip the technical sections.
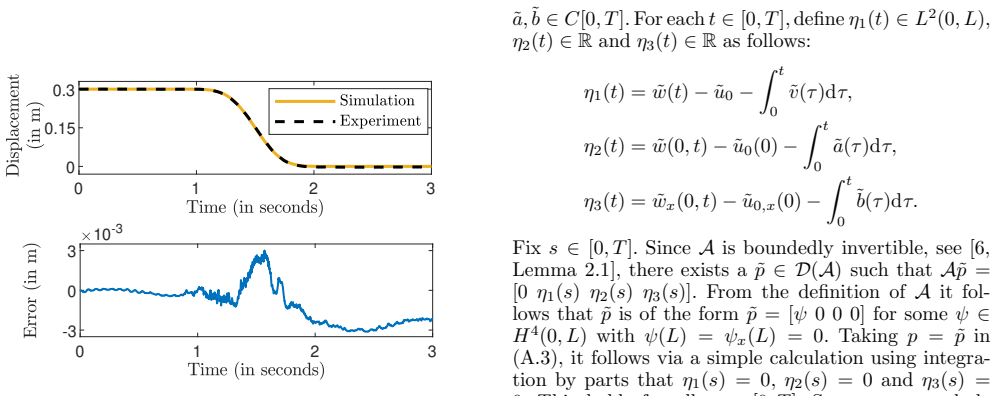
- [Numerical results section] Figure captions in the simulation/experiment section would benefit from listing the specific non-uniform beam parameters (e.g., mass density function, tip-mass value) used in each run to improve reproducibility.
Simulated Author's Rebuttal
We thank the referee for the careful reading and for highlighting the potential interest of the flatness-based motion planning and approximate controllability results for the non-uniform beam with moving base. We address the two major comments below and will revise the manuscript accordingly to strengthen the presentation.
read point-by-point responses
-
Referee: [§3] §3 (extension of generating-functions flatness): the manuscript asserts that the method extends without obstruction to the variable-coefficient non-uniform beam and that every eigenfunction therefore belongs to the feasible set S, yet supplies no explicit series construction, differential relations for the flat output, or convergence argument in the energy space that would confirm the resulting control remains C² when the initial datum is an eigenmode. This step is load-bearing for the density claim used in controllability.
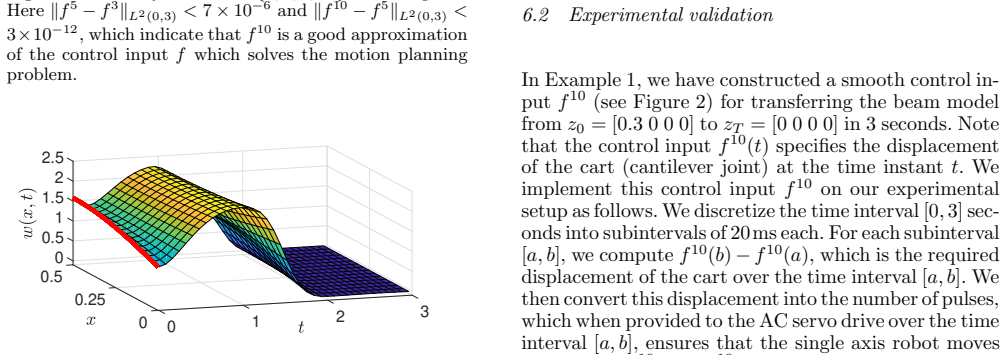
Authors: We agree that the current manuscript presents the extension at a high level and would benefit from additional detail on the construction. The generating-functions method proceeds by substituting a formal power series (in time derivatives of the flat output) into the coupled PDE-ODE system; the resulting recursion for the spatial coefficient functions is well-defined for smooth variable coefficients and yields the same conclusion that any eigenfunction can be reached exactly by a C² control. Convergence of the series in the energy space follows from the Riesz-basis property together with standard growth estimates on the recursion coefficients. In the revision we will add a dedicated subsection (or appendix) that records the adapted recursion relations, the choice of flat output for an eigenmode, and a brief convergence argument confirming C² regularity of the control. revision: yes
-
Referee: [§4] §4 (approximate controllability): the deduction that membership of the Riesz basis in S implies approximate controllability over arbitrary intervals is formally correct once the membership is established, but the membership itself rests on the un-detailed flatness construction for the coupled PDE-ODE system with position-dependent coefficients; without that verification the controllability conclusion cannot be regarded as fully supported.
Authors: We concur that the controllability claim depends on rigorously placing the Riesz basis inside the feasible set S. Once the flatness construction is detailed as outlined in the response to the preceding comment, every eigenfunction belongs to S and the standard density argument yields approximate controllability on any finite interval. The revision will therefore incorporate the requested verification so that the controllability result rests on a complete foundation. revision: yes
Circularity Check
No circularity: controllability follows from independent flatness construction plus standard Riesz-basis density
full rationale
The derivation constructs a feasible set S of states reachable by C^2 controls via the generating-functions flatness method applied to the coupled PDE-ODE system, verifies that steady-states and all eigenfunctions lie in S, and invokes the known fact that the eigenfunctions form a Riesz basis for the state space to obtain density and hence approximate controllability. No equation or claim reduces a derived quantity to an input by definition, no parameter is fitted and then relabeled a prediction, and the Riesz-basis property is treated as an external standard result rather than a self-citation load-bearing step. The extension of flatness to the non-uniform case is asserted to proceed without obstruction, but the controllability conclusion does not collapse to that assertion alone; it rests on the explicit membership argument and the independent basis property.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The beam dynamics are governed by a coupled PDE-ODE model with boundary input.
- domain assumption There exists a unique state trajectory for every initial state and each twice continuously differentiable control input compatible with the initial state.
Reference graph
Works this paper leans on
-
[1]
Y. Aoustin, M. Fliess, H. Mounier, P. Rouchon and J. Rudolph, “Theory and practice in the motion planning and control of a flexible robot arm using Mikusi´ nski operators, ” Proc. 5th IF AC Symp. Robot Control , pp. 267-273, Sep. 3-5, 1997, Nantes, France
work page 1997
-
[2]
Flatness-base d control of a horizontally moving erected beam with a point mass,
M. Bachmayer, H. Ulbrich and J. Rudolph, “Flatness-base d control of a horizontally moving erected beam with a point mass,” Math. Comput. Model. Dyn. Syst., vol. 17, pp. 49-69, 2011
work page 2011
-
[3]
Flatness-based estimated st ate feedback control for a rotating flexible beam: Experimental results,
M. Barczyk and A. F. Lynch, “Flatness-based estimated st ate feedback control for a rotating flexible beam: Experimental results,” IET Control Theory Appl., vol. 2, 288-302, 2008
work page 2008
-
[4]
Steady-state to steady - state transfer of PDEs using semi-discretization and flatne ss,
S. Chatterjee and V. Natarajan, “Steady-state to steady - state transfer of PDEs using semi-discretization and flatne ss,” Proc. 59th IEEE Conf. Decision & Control , pp. 4454-4459, Dec. 14-18, 2020, Jeju Island, Republic of Korea
work page 2020
-
[5]
Semi- discretization of a Euler-Bernoulli beam and its applicati on to motion planning
S. Chatterjee, A. Batra and V. Natarajan, “Semi- discretization of a Euler-Bernoulli beam and its applicati on to motion planning”, IEEE Access, vol. 13, pp. 33665-33681, 2025
work page 2025
-
[6]
On the boundary control of a hybrid system with variable coefficients,
B. Z. Guo, “On the boundary control of a hybrid system with variable coefficients,” J. Optim. Theory Appl. , vol. 114, pp. 373-395, 2002
work page 2002
-
[7]
Boundary controllability and observability of a one-dimensional nonuniform SCOLE system,
B. Z. Guo and S. A. Ivanov, “Boundary controllability and observability of a one-dimensional nonuniform SCOLE system,” J. Optim. Theory Appl. , vol. 127, pp. 89-108, 2005
work page 2005
-
[8]
B. Kolar, N. Gehring and M. Sch¨ oberl, “On the calculatio n of differential parameterizations for the feedforward cont rol of an Euler-Bernoulli beam,” In Dynamics and Control of Advanced Structures and Machines: Contributions from the 4th International Workshop, Linz, pp. 123-136, Springer, 2022
work page 2022
-
[9]
Motion planning for a 1-D diffusion equation using a Brunovsky-like decomposition,
B. Laroche and P. Martin, “Motion planning for a 1-D diffusion equation using a Brunovsky-like decomposition,” Proc. 14th Int. Symp. MTNS , pp. 1-6, June 19-23, 2000, Perpignan, France
work page 2000
-
[10]
Exact boundary controllabil ity of a hybrid system of elasticity,
W. Littman and L. Markus, “Exact boundary controllabil ity of a hybrid system of elasticity,” Arch. Rat. Mech., pp. 193- 235, 1988
work page 1988
-
[11]
Flatness-based control of a flexible beam in a gravitional field,
A. F. Lynch and D. W ang, “Flatness-based control of a flexible beam in a gravitional field,” Proc. 2004 Amer. Control Conf., pp. 5449-5454, Jun. 30 - Jul. 2, 2004, Boston, USA
work page 2004
-
[12]
Null controllabil ity of the heat equation using flatness,
P. Martin, L. Rosier and P. Rouchon, “Null controllabil ity of the heat equation using flatness,” Automatica, vol. 50, pp. 3067-3076, 2014
work page 2014
-
[13]
Null controllabil ity of one-dimensional parabolic equations by the flatness approach,
P. Martin, L. Rosier and P. Rouchon, “Null controllabil ity of one-dimensional parabolic equations by the flatness approach,” SIAM J. Control Optim. , vol. 54, pp. 198-220, 2016
work page 2016
-
[14]
Controllability o f the 1D Schr¨ odinger equation using flatness,
P. Martin, L. Rosier and P. Rouchon, “Controllability o f the 1D Schr¨ odinger equation using flatness,” Automatica, vol. 91, pp. 208-216, 2018
work page 2018
-
[15]
Exact controllability of a linear Korteweg-deVries Equation by t he flatness approach,
P. Martin, I. Rivas, L. Rosier and P. Rouchon, “Exact controllability of a linear Korteweg-deVries Equation by t he flatness approach,” SIAM J. Control Optim. , vol. 57, pp. 2467-2486, 2019
work page 2019
-
[16]
T. Meurer, D. Thull, and A. Kugi, “Flatness based tracking control of a piezoactuated Euler-Bernoulli beam with non-collocated feedback: theory and experiments,” Int. J. Control , vol. 81, pp. 475-493, 2008
work page 2008
-
[17]
Motion planning fo r a damped Euler-Bernoulli Beam,
T. Meurer, J. Schr¨ ock, and A. Kugi, “Motion planning fo r a damped Euler-Bernoulli Beam,” Proc. 49th IEEE Conf. Decision & Control, pp. 2566-2571, Dec. 15-17, 2010, Atlanta, USA
work page 2010
-
[18]
A. Pazy, Semigroups of Linear Operators and Applications to Partial Differential Equations , Springer-Verlag, New York, 1983
work page 1983
-
[19]
Exact boundary controllability of a hybrid sys tem of elasticity by the HUM method,
B. Rao, “Exact boundary controllability of a hybrid sys tem of elasticity by the HUM method,” ESAIM: Cont. Optim. Calc. Var., vol. 6, pp. 183-199, 2001
work page 2001
-
[20]
Motion planning and open loop control for linear distributed parameter systems with lumped controls,
J. Rudolph and F. W oittennek, “Motion planning and open loop control for linear distributed parameter systems with lumped controls,” Int. J. Control , vol. 81, pp. 457-474, 2008
work page 2008
-
[21]
M. Tuscnak and G. W eiss, Observation and Control for Operator Semigroups, Birkh¨ auser, Basel, 2009
work page 2009
-
[22]
W ell-posedness, regularity and e xact controllability of the SCOLE model,
X. Zhao and G. W eiss, “W ell-posedness, regularity and e xact controllability of the SCOLE model,” Math. Control Signals Syst., vol. 22, pp. 91-127, 2010
work page 2010
-
[23]
L. Rodino, Linear partial differential operators in Gevrey spaces, W orld Scientific Publishing, Singpore, 1993
work page 1993
-
[24]
Controllability and observabili ty of a well-posed system coupled with a finite-dimensional system ,
X. Zhao and G. W eiss, “Controllability and observabili ty of a well-posed system coupled with a finite-dimensional system ,” IEEE Trans. Autom. Control, vol. 56, pp. 88-99, 2011. 14
work page 2011
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.