Data-Driven Global Stabilization of Unknown Infinite Networks
Pith reviewed 2026-05-10 15:23 UTC · model grok-4.3
The pith
Data from each unknown subsystem builds a global controller that makes the entire infinite network uniformly globally asymptotically stable.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
For each unknown polynomial subsystem, one finite set of noise-corrupted trajectories is sufficient to obtain a data-driven ISS Lyapunov function and its associated controller. These per-subsystem constructions are composed using the small-gain theorem in infinite-dimensional spaces to produce a global control Lyapunov function whose feedback law renders the infinite interconnection uniformly globally asymptotically stable.
What carries the argument
Data-driven synthesis of ISS Lyapunov functions from trajectories, composed via the small-gain condition for infinite-dimensional spaces.
If this is right
- The network reaches the origin from arbitrary initial states without any explicit model of the subsystems.
- Controller synthesis remains local and therefore independent of the total number of subsystems.
- Measurement noise in the collected trajectories is tolerated while still guaranteeing UGAS.
- Both finite and countably infinite interconnections are covered once the small-gain conditions are met.
Where Pith is reading between the lines
- If analogous data-driven ISS functions can be obtained for non-polynomial dynamics, the same composition would stabilize wider classes of unknown networks.
- Approximating very large but finite real-world networks by the infinite case would allow direct transfer of the local-data design procedure.
- Numerical verification on large finite networks of Lorenz oscillators would serve as a practical test of the infinite-dimensional result.
Load-bearing premise
A single set of noise-corrupted trajectories from each subsystem is enough to produce a valid ISS Lyapunov function and controller, and the small-gain inequalities hold across the infinite collection.
What would settle it
An explicit infinite network of polynomial systems for which the data-driven functions are computed yet some closed-loop trajectories fail to converge to the origin.
Figures


read the original abstract
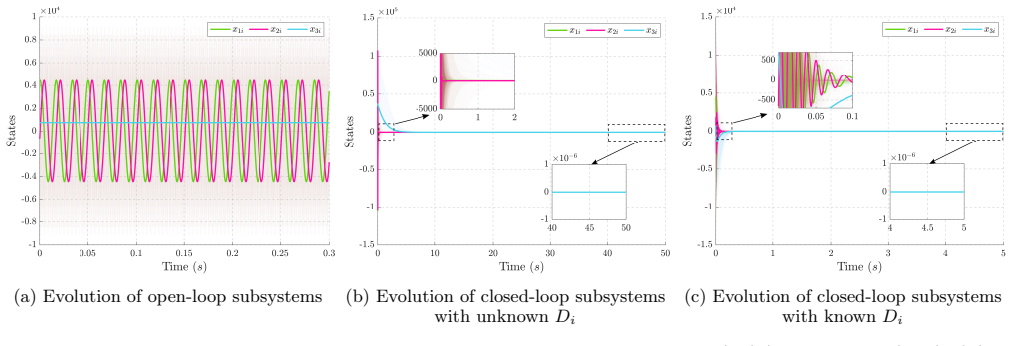
This paper develops a direct data-driven framework for infinite networks with unknown nonlinear polynomial subsystems, enabling the synthesis of controllers that ensure the entire network is uniformly globally asymptotically stable (UGAS). To address scalability challenges arising from high dimensionality, we develop a data-driven approach to construct an input-to-state stable (ISS) Lyapunov function and its corresponding controller for each unknown subsystem using only a single set of noise-corrupted input-state trajectories collected from that subsystem. Once each subsystem admits a data-driven ISS Lyapunov function, we leverage a compositional small-gain framework for infinite-dimensional spaces to construct a global control Lyapunov function and its associated controller, thereby ensuring UGAS of the entire infinite network. The effectiveness of the proposed data-driven approach is demonstrated through three case studies, including infinite networks of spacecraft, Lorenz chaotic systems, and an academic example with a state-dependent control input matrix.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper develops a direct data-driven framework for synthesizing controllers that render unknown infinite networks of nonlinear polynomial subsystems uniformly globally asymptotically stable (UGAS). For each subsystem, a single set of noise-corrupted input-state trajectories is used to construct an ISS Lyapunov function and associated controller via a data-driven procedure. These local ISS certificates are then composed using a small-gain theorem for infinite-dimensional spaces to obtain a global control Lyapunov function and controller guaranteeing network-wide UGAS. Effectiveness is illustrated via case studies on infinite networks of spacecraft, Lorenz systems, and an academic example with state-dependent input matrix.
Significance. If the central data-to-certificate step can be made rigorous, the work would provide a scalable route to global stabilization of high-dimensional unknown networks by combining data-driven ISS synthesis with infinite-dimensional small-gain theory. This could impact applications such as multi-agent coordination or large-scale process control where explicit models are unavailable. The approach avoids centralized modeling and exploits the compositional structure, which is a strength if the local certificates are provably valid.
major comments (3)
- [Data-driven ISS synthesis section] The data-driven construction of the ISS Lyapunov function (detailed in the section on subsystem-level synthesis) relies on a single noise-corrupted trajectory set per subsystem to produce a polynomial V and controller that satisfy the ISS dissipation inequality for the true unknown dynamics. No error bounds, robustness margins, or verification that the inequality holds globally (rather than only on sampled points) are provided; any local violation or gain overestimate can invalidate the subsequent infinite-network small-gain condition.
- [Compositional small-gain section] In the compositional small-gain framework for infinite-dimensional spaces (the section applying the theorem to the network), the paper assumes the local ISS gains derived from the data-driven V's satisfy the required small-gain condition strictly. However, without quantitative bounds on how noise affects the estimated gains, it is unclear whether the composition remains valid or whether the resulting global CLF guarantees UGAS for the true interconnected system.
- [Case studies section] The three case studies (spacecraft, Lorenz, academic example) are presented without quantitative metrics such as convergence rates, robustness to varying noise levels, comparisons against model-based or other data-driven baselines, or explicit checks that the small-gain condition holds numerically for the constructed gains.
minor comments (2)
- [Preliminaries] Notation for the ISS gains and the infinite interconnection operators should be clarified with explicit definitions and a table summarizing the symbols used in the small-gain theorem.
- [Abstract and Introduction] The abstract and introduction would benefit from a brief statement of the precise assumptions on the noise (e.g., boundedness, distribution) under which the data-driven certificates are claimed to be valid.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive comments. We address each major comment point by point below, indicating the revisions planned for the manuscript.
read point-by-point responses
-
Referee: [Data-driven ISS synthesis section] The data-driven construction of the ISS Lyapunov function (detailed in the section on subsystem-level synthesis) relies on a single noise-corrupted trajectory set per subsystem to produce a polynomial V and controller that satisfy the ISS dissipation inequality for the true unknown dynamics. No error bounds, robustness margins, or verification that the inequality holds globally (rather than only on sampled points) are provided; any local violation or gain overestimate can invalidate the subsequent infinite-network small-gain condition.
Authors: We agree that the absence of explicit error bounds and global verification is a limitation in the current presentation. The synthesis solves a semidefinite program enforcing the ISS dissipation inequality at the finite data points collected from the unknown polynomial subsystem. In the revised version we will add a dedicated remark clarifying that the polynomial form permits post hoc verification of the inequality on a dense sampling grid over a compact set, and we will include a brief robustness-margin discussion based on the strict inequality required by the subsequent small-gain theorem. Deriving tight, a-priori noise-to-gain bounds for arbitrary polynomial degrees remains an open technical question and is noted as future work. revision: partial
-
Referee: [Compositional small-gain section] In the compositional small-gain framework for infinite-dimensional spaces (the section applying the theorem to the network), the paper assumes the local ISS gains derived from the data-driven V's satisfy the required small-gain condition strictly. However, without quantitative bounds on how noise affects the estimated gains, it is unclear whether the composition remains valid or whether the resulting global CLF guarantees UGAS for the true interconnected system.
Authors: The referee correctly identifies that noise-induced perturbations in the estimated gains could, in principle, violate the strict small-gain condition. The manuscript currently relies on the fact that the small-gain theorem is stated with a strict contraction; we will strengthen the exposition by adding a short sensitivity subsection that propagates bounded data noise into interval bounds on the gain functions and verifies that the contraction remains strict under these intervals. This will be supported by a numerical check on the constructed gains for each case study. revision: yes
-
Referee: [Case studies section] The three case studies (spacecraft, Lorenz, academic example) are presented without quantitative metrics such as convergence rates, robustness to varying noise levels, comparisons against model-based or other data-driven baselines, or explicit checks that the small-gain condition holds numerically for the constructed gains.
Authors: We accept this observation. The revised manuscript will augment the case-study section with (i) tabulated convergence times and steady-state errors for multiple noise realizations, (ii) explicit numerical verification that the composed small-gain condition holds (by evaluating the gain functions at representative points), and (iii) a brief comparison against a model-based ISS-Lyapunov design that uses the true subsystem equations. These additions will be placed in new tables and figures without altering the core claims. revision: yes
Circularity Check
No circularity: data-driven certificates and external small-gain theorem remain independent
full rationale
The derivation proceeds by (i) fitting a polynomial ISS Lyapunov function and controller to a single set of noise-corrupted trajectories per subsystem via standard SOS or regression techniques, then (ii) invoking a pre-existing compositional small-gain theorem for infinite-dimensional systems to assemble a global CLF. Neither step defines the output in terms of itself, renames a fitted quantity as a prediction, nor reduces the UGAS claim to a self-citation chain; the small-gain result is an external mathematical theorem whose validity does not depend on the present paper's data or parameters. The construction is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (3)
- domain assumption Subsystems are nonlinear polynomial
- ad hoc to paper Single set of noise-corrupted trajectories suffices to construct valid ISS Lyapunov function and controller
- standard math Compositional small-gain framework applies to infinite-dimensional spaces once local ISS holds
Reference graph
Works this paper leans on
-
[1]
Bibitem after note You are using a bibitem after a note in a subbibitems environment; note should the last item in a subbibitems environment \@itemnote @bb@error [] @noitemnote \@tempa \@noitemnote \@noitemnote \@itemnote @bibitem\@bibitem @lbibitem\@lbibitem \@bibitem#1 \@itemnote @bibitem #1 \@tempa @noitemnote \@lbibitem[#1]#2 \@itemnote @lbibitem[#1] ...
-
[2]
4" FUNCTION default.is.dash.repeated.names #1 FUNCTION default.name.format.string
@stdbsttrue @ctr \@lbibitem [ @ctr] \@bibitem##1 @ctr \@lbibitem[ @ctr] ##1 @bb@error\@mkbberr @filesw @natbibloaded \@auxout \@itemslabel @bibnum a-- @ctr \@auxout \@itemslabel :s @bibnum \@auxout \@itemslabel @bibnum a-- @ctr \@auxout \@itemslabel :s @bibnum @ctr @bibnum @citex\@citex \@tempcntc @citex[#1]#2 @filesw \@auxout #2 \@tempcnta @\@tempcntb @n...
work page 1991
-
[3]
" write newline "" initialize.prev.this.status FUNCTION begin.bib " write newline preamble empty 'skip preamble write newline if " thebibliography " longest.label * " " * write newline " [1] #1 " write newline " url@samestyle " write newline " " write newline " [2] #2 " write newline " =0pt " write newline " " ALTinterwordstretchfactor * " " * write newli...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.