Block Diagram Analysis of a Design Principle for Amplitude-Frequency Profiles in Biological Oscillations
Pith reviewed 2026-05-10 15:12 UTC · model grok-4.3
The pith
Block diagram models reproduce amplitude-frequency profiles of biological oscillators and constrain their feedback strengths.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
We adapted and developed a block diagram modeling framework for biological oscillators. We showed how the observed amplitude-frequency characteristics could be obtained from the block diagram models. We obtained constraints on the positive feedback and negative feedback strengths for the oscillations to exist.
What carries the argument
Block diagram representations of nonlinear positive and negative feedback loops, used to derive amplitude-frequency relations and existence conditions for oscillations.
If this is right
- Amplitude-frequency profiles of oscillators follow from the structure of their feedback loops.
- Constraints on feedback strengths are necessary for sustained oscillations.
- The classification into fixed-frequency or fixed-amplitude types depends on the relative strengths of positive and negative feedback.
- This modeling offers a qualitative and quantitative alternative to ODE simulations.
Where Pith is reading between the lines
- The framework could guide the design of synthetic oscillators with specific amplitude or frequency tuning.
- Experimental validation might involve measuring feedback gains in known oscillator circuits and checking against the derived constraints.
- Similar block diagram techniques may apply to analyzing oscillations in other domains like engineering or chemistry.
- This contributes to viewing biological systems through a systems and control lens.
Load-bearing premise
The block diagram abstraction accurately captures the essential nonlinear feedback dynamics of real biological oscillators.
What would settle it
Comparing the amplitude-frequency curves predicted by the block diagram model against measured data from a specific biological oscillator such as the repressilator or circadian rhythm to check for agreement.
Figures





read the original abstract
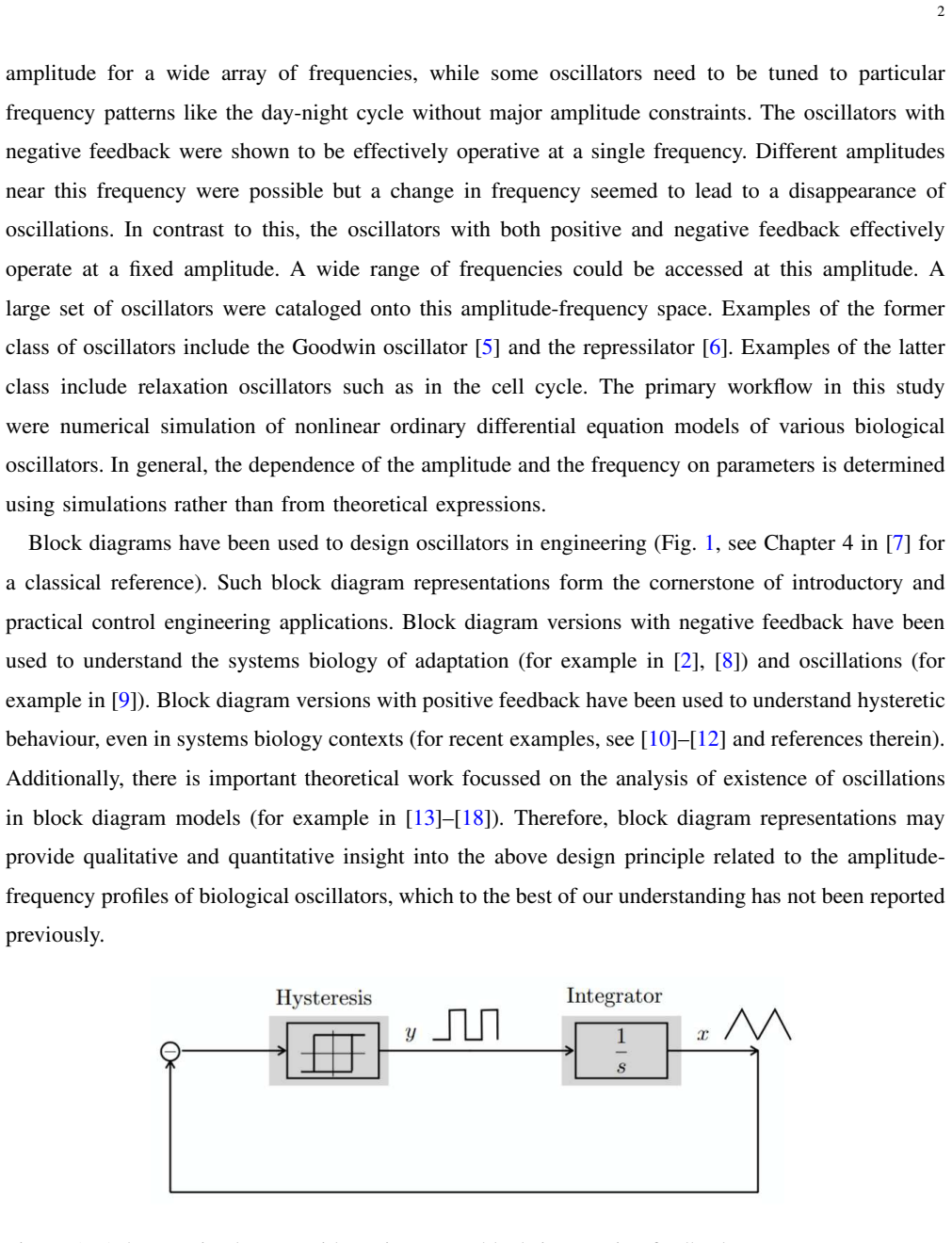
An important design principle for biological oscillators divides the oscillators into two classes: fixed frequency, variable amplitude and fixed amplitude, variable frequency. Because of the interplay of nonlinearity and feedback, both positive and negative, analytical investigations of this design principle are primarily based on numerical simulations of ordinary differential equations. To enhance the qualitative and quantitative characterization, we adapted and developed a block diagram modeling framework. We showed how the observed amplitude-frequency characteristics could be obtained from the block diagram models. We obtained constraints on the positive feedback and negative feedback strengths for the oscillations to exist. These results should contribute to a systems and control perspective on oscillations in biology and related contexts.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript adapts and develops a block diagram modeling framework to analyze a design principle for biological oscillators, dividing them into fixed-frequency/variable-amplitude and fixed-amplitude/variable-frequency classes. It claims to obtain the observed amplitude-frequency characteristics directly from the block diagrams and to derive constraints on the strengths of positive and negative feedback loops required for oscillations to exist, offering a systems-and-control perspective that supplements numerical ODE simulations.
Significance. If the block-diagram derivations are shown to be rigorous and the structural assumptions validated, the work could supply analytical constraints and qualitative insights into biological oscillation design principles that are difficult to extract from pure simulation, strengthening the link between control theory and systems biology.
major comments (2)
- [Modeling Framework and Results] The central claim that amplitude-frequency profiles and feedback-strength constraints follow from the block diagrams rests on the unstated assumption that the chosen interconnection of linear blocks plus a small number of static nonlinearities reproduces the essential limit-cycle behavior. Without explicit derivation steps showing how the diagram yields the profiles (e.g., via describing functions, harmonic balance, or small-gain arguments), it is impossible to determine whether the results are general design principles or artifacts of the specific nonlinearity placement and type.
- [Discussion and Conclusions] No validation against concrete biological oscillator data, parameter regimes, or alternative models (e.g., those with distributed delays or additional loops) is reported. This is load-bearing: if real systems contain mechanisms omitted from the diagram, the derived inequalities on positive/negative feedback gains become model-specific rather than broadly applicable design principles.
minor comments (2)
- [Methods] Clarify the precise sector or oddness assumptions placed on the static nonlinearities and state whether the analysis assumes time-scale separation or other simplifications.
- [Results] Add a short comparison table or figure contrasting the block-diagram predictions with at least one published numerical or experimental amplitude-frequency profile from a biological oscillator.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments. We address each major comment below and outline the revisions we will make to strengthen the manuscript.
read point-by-point responses
-
Referee: [Modeling Framework and Results] The central claim that amplitude-frequency profiles and feedback-strength constraints follow from the block diagrams rests on the unstated assumption that the chosen interconnection of linear blocks plus a small number of static nonlinearities reproduces the essential limit-cycle behavior. Without explicit derivation steps showing how the diagram yields the profiles (e.g., via describing functions, harmonic balance, or small-gain arguments), it is impossible to determine whether the results are general design principles or artifacts of the specific nonlinearity placement and type.
Authors: We thank the referee for this important point on transparency. The derivations rely on the describing function method applied to the block diagrams: the linear blocks are represented in the frequency domain, the static nonlinearities are approximated by their describing functions, and the harmonic balance condition is imposed to obtain the amplitude-frequency relation for the limit cycle. The feedback strength constraints then follow from the conditions under which a nontrivial solution to the balance equations exists. While the key equations appear in Sections 3 and 4, we agree that the intermediate algebraic steps are not spelled out in sufficient detail. In the revision we will insert a dedicated subsection that walks through the derivation from the block diagram interconnection to the closed-form amplitude-frequency expressions and the resulting inequalities on positive and negative feedback gains, thereby clarifying that the results are tied to the assumed structure rather than claimed to be universal. revision: yes
-
Referee: [Discussion and Conclusions] No validation against concrete biological oscillator data, parameter regimes, or alternative models (e.g., those with distributed delays or additional loops) is reported. This is load-bearing: if real systems contain mechanisms omitted from the diagram, the derived inequalities on positive/negative feedback gains become model-specific rather than broadly applicable design principles.
Authors: The manuscript is a theoretical systems-and-control contribution whose primary aim is to derive analytical relations directly from block-diagram structure, thereby complementing the numerical ODE studies that dominate the literature. We do not present empirical fits or comparisons with specific biological datasets in the current version. We acknowledge that this limits the immediate claim to broad applicability. In the revised manuscript we will expand the Discussion to (i) explicitly list the structural assumptions (single static nonlinearities, lumped delays, absence of additional loops), (ii) illustrate how the derived constraints map onto two well-studied models (Goodwin oscillator and a minimal repressilator), and (iii) outline the conditions under which the inequalities would remain approximately valid when modest distributed delays or extra loops are present. Full quantitative validation against experimental time-series data is beyond the scope of this work and will be noted as a natural direction for follow-up studies. revision: partial
Circularity Check
No load-bearing circularity; block-diagram constraints derived from modeling structure rather than fitted inputs or self-referential definitions.
full rationale
The paper adapts a block-diagram framework to represent positive/negative feedback in biological oscillators, then derives amplitude-frequency relations and existence constraints directly from the interconnection of linear blocks and static nonlinearities. No evidence that any 'prediction' reduces to a parameter fit by construction, nor that central claims rest on self-citation chains whose validity is unverified outside the present work. The derivation chain is self-contained against the stated modeling assumptions; the reader's score of 2 reflects only routine self-citation of prior modeling frameworks that are not load-bearing for the new constraints.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Daniel B. Forger. Biological clocks, rhythms, and oscillations: The theory o f biological timekeeping . The MIT Press, Cambridge, Massachusetts, 2017
work page 2017
-
[2]
Domitilla Del V ecchio and Richard M. Murray. Biomolecular feedback systems . Princeton university press, Princeton (N.J.), 2015
work page 2015
-
[3]
An introduction to systems biology: design principles of bi ological circuits
Uri Alon. An introduction to systems biology: design principles of bi ological circuits . CRC Press, Taylor & Francis Group, Boca Raton London New Y ork, second edition edition, 2020
work page 2020
-
[4]
Pom erening, Chao Tang, and James E
Tony Y u-Chen Tsai, Y oon Sup Choi, Wenzhe Ma, Joseph R. Pom erening, Chao Tang, and James E. Ferrell. Robust, Tunable Biological Oscillations from Interlinked Positive and Neg ative Feedback Loops. Science, 321(5885):126–129, July 2008
work page 2008
-
[5]
Brian C. Goodwin. Oscillatory behavior in enzymatic con trol processes. Advances in Enzyme Regulation , 3:425–437, January 1965
work page 1965
-
[6]
Michael B. Elowitz and Stanislas Leibler. A synthetic os cillatory network of transcriptional regulators. Nature, 403(6767):335–338, January 2000
work page 2000
-
[7]
Positive feedback: a general systems approach to positive/ negative feedback and mutual causality
John Hallett Milsum, editor. Positive feedback: a general systems approach to positive/ negative feedback and mutual causality . Pergamon Press, Oxford, 1968
work page 1968
-
[8]
Tau-Mu Yi, Y un Huang, Melvin I. Simon, and John Doyle. Rob ust perfect adaptation in bacterial chemotaxis through int egral feedback control. Proc. Natl. Acad. Sci. U.S.A. , 97(9):4649–4653, April 2000
work page 2000
-
[9]
Homogeneous Time Constants Promot e Oscillations in Negative Feedback Loops
Franco Blanchini, Christian Cuba Samaniego, Elisa Fran co, and Giulia Giordano. Homogeneous Time Constants Promot e Oscillations in Negative Feedback Loops. ACS Synth. Biol. , 7(6):1481–1487, June 2018
work page 2018
-
[10]
The regulatory circu its for hysteretic switching in cellular signal transducti on pathways
Jeong-Rae Kim and Kwang-Hyun Cho. The regulatory circu its for hysteretic switching in cellular signal transducti on pathways. The FEBS Journal , 279(18):3329–3337, September 2012
work page 2012
-
[11]
R. Sepulchre, G. Drion, and A. Franci. Control Across Sc ales by Positive and Negative Feedback. Annu. Rev. Control Robot. Auton. Syst., 2(1):89–113, May 2019
work page 2019
-
[12]
A quantitative design guid eline for biomolecular positive feedback systems
Vinod Kumar and Shaunak Sen. A quantitative design guid eline for biomolecular positive feedback systems. IF AC Journal of Systems and Control , 36:100400, June 2026
work page 2026
-
[13]
David Angeli and Eduardo D. Sontag. Oscillations in I/O Monotone Systems Under Negative Feedback. IEEE Trans. Automat. Contr ., 53(Special Issue):166–176, January 2008
work page 2008
-
[14]
Miranda-Villatoro, Fulvio Forni, and Rodolphe J
F /acute.ts1elix A. Miranda-Villatoro, Fulvio Forni, and Rodolphe J. Se pulchre. Analysis of Lur’e dominant systems in the frequenc y domain. Automatica, 98:76–85, December 2018. 10
work page 2018
-
[15]
Dominant Mixed Feedback D esign for Stable Oscillations
Weiming Che and Fulvio Forni. Dominant Mixed Feedback D esign for Stable Oscillations. IEEE Trans. Automat. Contr . , 69(2):1133–1140, February 2024
work page 2024
-
[16]
Shaping oscillations via mixed feedback
Weiming Che and Fulvio Forni. Shaping oscillations via mixed feedback. In 2021 60th IEEE Conference on Decision and Control (CDC), pages 4602–4608, Austin, TX, USA, December 2021. IEEE
work page 2021
-
[17]
A tunable mixed feedback o scillator
Weiming Che and Fulvio Forni. A tunable mixed feedback o scillator. In 2021 European Control Conference (ECC), pages 998–1004, Delft, Netherlands, June 2021. IEEE
work page 2021
-
[18]
Analog C ross Coupled Controller for Oscillations: Modeling and Des ign via Dominant System Theory
Weiming Che, Thomas Chaffey, and Fulvio Forni. Analog C ross Coupled Controller for Oscillations: Modeling and Des ign via Dominant System Theory. In 2022 IEEE 61st Conference on Decision and Control (CDC) , pages 7642–7647, Cancun, Mexico, December 2022. IEEE
work page 2022
-
[19]
ean-Jacques E. Slotine and Weiping Li. Applied nonlinear control . Prentice Hall, Englewood Cliffs, NJ, 1991
work page 1991
-
[20]
Nonlinear systems: analysis, stability, and control
Shankar Sastry. Nonlinear systems: analysis, stability, and control . Number 10 in Interdisciplinary applied mathematics. Spri nger, New Y ork Berlin Heidelberg, nachdr. edition, 2009
work page 2009
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.