Multi-site Radar Systems for High-Precision Indoor Positioning and Tracking
Pith reviewed 2026-05-10 08:36 UTC · model grok-4.3
The pith
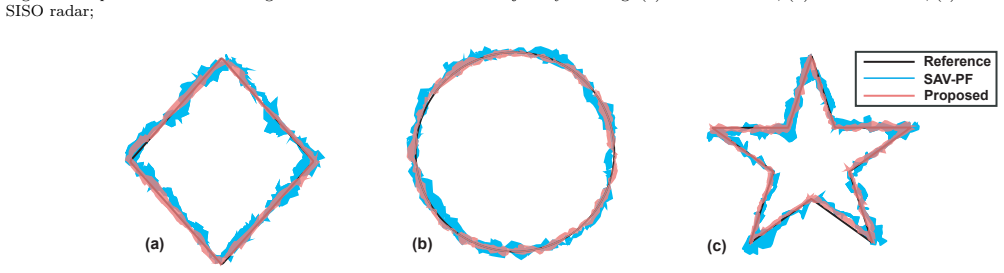
Multi-site SISO radars with a velocity synthesis-assisted localization algorithm achieve centimeter-level tracking accuracy for humans without MIMO hardware or strict phase synchronization.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
our multi-site radar systems achieve centimeter-level tracking accuracy for human subjects, outperforming existing methods in complex trajectory tracking.
Load-bearing premise
The inherent geometric constraints introduced by velocity synthesis enable the proposed algorithm to remain robust under low signal-to-noise ratio (SNR), severe multipath propagation, and large synchronization latency.
Figures










read the original abstract
This paper introduces a high-precision indoor positioning and tracking method that utilizes multi-site single-input single-output (SISO) radar systems. We propose a novel velocity synthesis-assisted (VSA) localization algorithm that iteratively refines target position estimates within range bins by fusing radial velocity measurements from multiple radars. This approach ensures enhanced accuracy in both velocity and position estimation. Moreover, the inherent geometric constraints introduced by velocity synthesis enable the proposed algorithm to remain robust under low signal-to-noise ratio (SNR), severe multipath propagation, and large synchronization latency. Notably, our method eliminates the use of multiple-input-multiple-output (MIMO) configurations and stringent phase synchronization requirements, substantially reducing hardware complexity while maintaining high positioning accuracy. We define standardized reference trajectories to facilitate a comprehensive and reproducible performance evaluation. Extensive simulations and experimental validations demonstrate that our multi-site radar systems achieve centimeter-level tracking accuracy for human subjects, outperforming existing methods in complex trajectory tracking.
Editorial analysis
A structured set of objections, weighed in public.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Standard models for radar propagation, multipath, and radial velocity measurements apply in indoor settings.
Reference graph
Works this paper leans on
-
[1]
Indoor localization of passive uhf rfid tags based on phase-of-arrival evaluation,
M. Scherhäufl, M. Pichler, E. Schimbäck, D. J. Müller, A. Ziroff, and A. Stelzer, “Indoor localization of passive uhf rfid tags based on phase-of-arrival evaluation,” IEEE Trans. Microw. Theory Techn., vol. 61, no. 12, pp. 4724–4729, Dec. 2013
2013
-
[2]
Fall detection and 3-d indoor localization by a custom rfid reader embedded in a smart e-health platform,
G. Paolini, D. Masotti, F. Antoniazzi, T. Salmon Cinotti, and A. Costanzo, “Fall detection and 3-d indoor localization by a custom rfid reader embedded in a smart e-health platform,” IEEE Trans. Microw. Theory Techn., vol. 67, no. 12, pp. 5329– 5339, Dec. 2019
2019
-
[3]
Precise distance and ve- locity measurement for real time locating in multipath environ- ments using a frequency-modulated continuous-wave secondary radar approach,
S. Roehr, P. Gulden, and M. Vossiek, “Precise distance and ve- locity measurement for real time locating in multipath environ- ments using a frequency-modulated continuous-wave secondary radar approach,” IEEE Trans. Microw. Theory Techn., vol. 56, no. 10, pp. 2329–2339, Oct. 2008
2008
-
[4]
A 24-ghz wireless locating system for human–robot interaction,
Y. Dobrev, T. Pavlenko, J. Geiß, M. Lipka, P. Gulden, and M. Vossiek, “A 24-ghz wireless locating system for human–robot interaction,” IEEE Trans. Microw. Theory Techn., vol. 67, no. 5, pp. 2036–2044, May 2019
2036
-
[5]
Real-time noncoherent uwb positioning radar with millimeter range accuracy: Theory and experiment,
C. Zhang, M. J. Kuhn, B. C. Merkl, A. E. Fathy, and M. R. Mahfouz, “Real-time noncoherent uwb positioning radar with millimeter range accuracy: Theory and experiment,” IEEE Trans. Microw. Theory Techn., vol. 58, no. 1, pp. 9–20, Jan. 2010
2010
-
[6]
Investigation of high-accuracy indoor 3-d positioning using uwb technology,
M. R. Mahfouz, C. Zhang, B. C. Merkl, M. J. Kuhn, and A. E. Fathy, “Investigation of high-accuracy indoor 3-d positioning using uwb technology,” IEEE Trans. Microw. Theory Techn., vol. 56, no. 6, pp. 1316–1330, Jun. 2008. 14
2008
-
[7]
Stereo vision-based 3d positioning and tracking,
A. Islam, M. Asikuzzaman, M. O. Khyam, M. Noor-A-Rahim, and M. R. Pickering, “Stereo vision-based 3d positioning and tracking,” IEEE Access, vol. 8, pp. 138 771–138 787, Jul. 2020
2020
-
[8]
A comprehen- sive survey of indoor localization methods based on computer vision,
A. Morar, A. Moldoveanu, I. Mocanu, F. Moldoveanu, I. E. Radoi, V. Asavei, A. Gradinaru, and A. Butean, “A comprehen- sive survey of indoor localization methods based on computer vision,” Sensors, vol. 20, no. 9, p. 2641, May 2020
2020
-
[9]
Indoor scene segmentation using a structured light sensor,
N. Silberman and R. Fergus, “Indoor scene segmentation using a structured light sensor,” in Proc. IEEE Int. Conf. Comput. Vis. Workshops. IEEE, Nov. 2011, pp. 601–608
2011
-
[10]
Vision-based gait recognition: A survey,
J. P. Singh, S. Jain, S. Arora, and U. P. Singh, “Vision-based gait recognition: A survey,” Ieee Access, vol. 6, pp. 70 497–70 527, Nov. 2018
2018
-
[11]
A review of vision-based gait recognition methods for human identification,
J. Wang, M. She, S. Nahavandi, and A. Kouzani, “A review of vision-based gait recognition methods for human identification,” in Proc. Int. Conf. Digit. Image Comput.: Tech. Appl., Dec. 2010, pp. 320–327
2010
-
[12]
Device-free localization: A review of non-rf techniques for unobtrusive indoor positioning,
F. Alam, N. Faulkner, and B. Parr, “Device-free localization: A review of non-rf techniques for unobtrusive indoor positioning,” IEEE Internet Things J., vol. 8, no. 6, pp. 4228–4249, Mar. 2021
2021
-
[13]
Indoor multihu- man device-free tracking system using multiradar cooperative sensing,
W. Li, Y. Wu, R. Chen, H. Zhou, and Y. Yu, “Indoor multihu- man device-free tracking system using multiradar cooperative sensing,” IEEE Sensors J., vol. 23, no. 22, pp. 27 862–27 871, Nov. 2023
2023
-
[14]
Un- derstanding and modeling of wifi signal based human activity recognition,
W. Wang, A. X. Liu, M. Shahzad, K. Ling, and S. Lu, “Un- derstanding and modeling of wifi signal based human activity recognition,” in Proc. ACM Int. Conf. Mobile Comput. Netw., Sep. 2015, pp. 65–76
2015
-
[15]
3-d indoor local- ization and identification through rssi-based angle of arrival estimation with real wi-fi signals,
H.-C. Yen, L.-Y. Ou Yang, and Z.-M. Tsai, “3-d indoor local- ization and identification through rssi-based angle of arrival estimation with real wi-fi signals,” IEEE Trans. Microw. Theory Techn., vol. 70, no. 10, pp. 4511–4527, Oct. 2022
2022
-
[16]
Uwtracking: Passive human tracking under los/nlos scenarios using ir-uwb radar,
Z. Guo, D. Wang, L. Gui, B. Sheng, H. Cai, F. Xiao, and J. Han, “Uwtracking: Passive human tracking under los/nlos scenarios using ir-uwb radar,” IEEE Trans. Mobile Comput., vol. 23, no. 12, pp. 11 853–11 870, Dec. 2024
2024
-
[17]
Catch your breath: Simultaneous rf tracking and respiration monitoring with radar pairs,
T. Zheng, Z. Chen, S. Zhang, and J. Luo, “Catch your breath: Simultaneous rf tracking and respiration monitoring with radar pairs,” IEEE Trans. Mobile Comput., vol. 22, no. 11, pp. 6283– 6296, Nov. 2023
2023
-
[18]
Oracle: Occlusion-resilient and self-calibrating mmwave radar network for people tracking,
M. Canil, J. Pegoraro, A. Shastri, P. Casari, and M. Rossi, “Oracle: Occlusion-resilient and self-calibrating mmwave radar network for people tracking,” IEEE Sensors J., vol. 24, no. 3, pp. 3157–3171, Feb. 2024
2024
-
[19]
Sequential human gait classification with distributed radar sensor fusion,
H. Li, A. Mehul, J. Le Kernec, S. Z. Gurbuz, and F. Fioranelli, “Sequential human gait classification with distributed radar sensor fusion,” IEEE Sensors J., vol. 21, no. 6, pp. 7590–7603, Mar. 2021
2021
-
[20]
Radar-based millimeter-wave sensing for accurate 3-d indoor positioning: Potentials and challenges,
A. Sesyuk, S. Ioannou, and M. Raspopoulos, “Radar-based millimeter-wave sensing for accurate 3-d indoor positioning: Potentials and challenges,” IEEE J. Indoor Seamless Position. Navig., vol. 2, pp. 61–75, Jan. 2024
2024
-
[21]
Moving target localization and activity/gesture recognition for indoor radio frequency sensing applications,
Y. Sun, H. Xiong, D. K. P. Tan, T. X. Han, R. Du, X. Yang, and T. T. Ye, “Moving target localization and activity/gesture recognition for indoor radio frequency sensing applications,” IEEE Sensors J., vol. 21, no. 21, pp. 24 318–24 326, Nov. 2021
2021
-
[22]
Soft fall detection with a height-tracking method based on mimo radar system,
C. Ding, H. Zhao, Y. Ma, H. Hong, and X. Zhu, “Soft fall detection with a height-tracking method based on mimo radar system,” IEEE Geosci. Remote Sens. Lett., vol. 20, pp. 1–5, May 2023
2023
-
[23]
Biomedical radar system for real-time contactless fall detection and indoor localization,
M. Mercuri, P. J. Soh, P. Mehrjouseresht, F. Crupi, and D. Schreurs, “Biomedical radar system for real-time contactless fall detection and indoor localization,” IEEE J. Electromagn. RF Microw. Med. Biol., vol. 7, no. 4, pp. 303–312, Dec. 2023
2023
-
[24]
Multitarget vital signs measure- ment with chest motion imaging based on mimo radar,
C. Feng, X. Jiang, M.-G. Jeong, H. Hong, C.-H. Fu, X. Yang, E. Wang, X. Zhu, and X. Liu, “Multitarget vital signs measure- ment with chest motion imaging based on mimo radar,” IEEE Trans. Microw. Theory Techn., vol. 69, no. 11, pp. 4735–4747, Nov. 2021
2021
-
[25]
Socionext Inc., 60GHz 3D Detection model SC1220AT2, Dec. 2023. [Online]. A vailable: https://www.socionext.com/en/ products/assp/radar-sensor/SC1220/
2023
-
[26]
Texas Instruments Inc., Single-chip 60-GHz to 64-GHz automotive radar sensor integrating DSP, MCU and radar accelerator, Apr. 2025. [Online]. A vailable: https://www.ti. com/product/AWR6843
2025
-
[27]
2-d self-injection-locked doppler radar for locating multiple people and monitoring their vital signs,
W.-C. Su, P.-H. Juan, D.-M. Chian, T.-S. J. Horng, C.-K. Wen, and F.-K. Wang, “2-d self-injection-locked doppler radar for locating multiple people and monitoring their vital signs,” IEEE Trans. Microw. Theory Techn., vol. 69, no. 1, pp. 1016–1026, Jan. 2021
2021
-
[28]
A robust and accurate fmcw mimo radar vital sign monitoring framework with 4-d cardiac beamformer and heart-rate trace carving technique,
Y. Li, C. Gu, and J. Mao, “A robust and accurate fmcw mimo radar vital sign monitoring framework with 4-d cardiac beamformer and heart-rate trace carving technique,” IEEE Trans. Microw. Theory Techn., vol. 72, no. 10, pp. 6094–6106, Oct. 2024
2024
-
[29]
Efficient near-field radar microwave imaging based on joint constraints of low-rank and structured sparsity at low snr,
S. Song, Y. Dai, Y. Song, and T. Jin, “Efficient near-field radar microwave imaging based on joint constraints of low-rank and structured sparsity at low snr,” IEEE Trans. Microw. Theory Techn., vol. 73, no. 5, pp. 2962–2977, May 2025
2025
-
[30]
A cooperative mimo radar network using highly integrated fmcw radar sen- sors,
A. Frischen, J. Hasch, and C. Waldschmidt, “A cooperative mimo radar network using highly integrated fmcw radar sen- sors,” IEEE Trans. Microw. Theory Techn., vol. 65, no. 4, pp. 1355–1366, Apr. 2017
2017
-
[31]
High angular resolution digital beamforming method for coherent FMCW MIMO radar networks,
M. Q. Nguyen, R. Feger, J. Bechter, M. Pichler-Scheder, and A. Stelzer, “High angular resolution digital beamforming method for coherent FMCW MIMO radar networks,” in IEEE MTT-S Int. Microw. Symp. Dig., Jun. 2021, pp. 756–759
2021
-
[32]
Con- stellation estimation, coherent signal processing, and multiper- spective imaging in an uncoupled bistatic cooperative radar network,
P. Fenske, T. Koegel, R. Ghasemi, and M. Vossiek, “Con- stellation estimation, coherent signal processing, and multiper- spective imaging in an uncoupled bistatic cooperative radar network,” IEEE J. Microw., vol. 4, no. 3, pp. 486–500, May 2024
2024
-
[33]
Federated target recognition for multi- radar sensor data security,
Y. Song and G. Dong, “Federated target recognition for multi- radar sensor data security,” IEEE Trans. Geosci. Remote Sens., vol. 61, pp. 1–10, May 2023
2023
-
[34]
Hybrid cognition for target tracking in cognitive radar networks,
W. W. Howard and R. M. Buehrer, “Hybrid cognition for target tracking in cognitive radar networks,” IEEE Trans. Radar Syst., vol. 1, pp. 118–131, Jun. 2023
2023
-
[35]
Continuous human activity recognition for arbi- trary directions with distributed radars,
R. G. Guendel, M. Unterhorst, E. Gambi, F. Fioranelli, and A. Yarovoy, “Continuous human activity recognition for arbi- trary directions with distributed radars,” in 2021 IEEE Radar Conf., Feb. 2021, pp. 1–6
2021
-
[36]
User identifica- tion under the collaborative auto-calibration of multi-mmwave radars,
Y. Wu, W. Li, R. Chen, Y. Yu, and H. Zhou, “User identifica- tion under the collaborative auto-calibration of multi-mmwave radars,” IEEE Sensors J., vol. 25, no. 3, pp. 4930–4942, Feb. 2025
2025
-
[37]
Indoor localization with distributed 5g small cells considering time alignment errors,
B. Wang, Y. Xu, S. Li, X. Tan, and G. Battistelli, “Indoor localization with distributed 5g small cells considering time alignment errors,” IEEE Sensors Journal, vol. 24, no. 13, pp. 20 813–20 823, May. 2024
2024
-
[38]
Efficient methods for time synchronization in distributed radar systems,
D. U. Mugil, F. D. Girolamo, and S. Tanzini, “Efficient methods for time synchronization in distributed radar systems,” in ICYRIME, 2024. [Online]. A vailable: https: //api.semanticscholar.org/CorpusID:274789881
2024
-
[39]
Massive mimo for high-accuracy target localization and tracking,
X. Zeng, F. Zhang, B. Wang, and K. J. R. Liu, “Massive mimo for high-accuracy target localization and tracking,” IEEE Internet Things J., vol. 8, no. 12, pp. 10 131–10 145, Jun. 2021
2021
-
[40]
IEEE Std 1588-2019, 2019
IEEE Standard for a Precision Clock Synchronization Protocol for Networked Measurement and Control Systems, IEEE Standards Association Std. IEEE Std 1588-2019, 2019. [Online]. A vailable:https://standards.ieee.org/standard/1588-2019.html
2019
-
[41]
Network time protocol version 4: Protocol and algorithms specification,
D. L. Mills, J. Burbank, and W. Kasch, “Network time protocol version 4: Protocol and algorithms specification,” Internet Engineering Task Force (IETF), Tech. Rep. RFC 5905, Jun. 2010. [Online]. A vailable: https://datatracker.ietf. org/doc/html/rfc5905
2010
-
[42]
An indoor positioning method using dual FMCW radar systems,
L. Qin, X. Wu, M. Zhang, W. Liu, and X. Liu, “An indoor positioning method using dual FMCW radar systems,” in Proc. IEEE MTT-S Int. Wireless Symp. (IWS), May 2024, pp. 1–3
2024
-
[43]
An indoor fall monitoring system: Robust, multistatic radar sensing and explainable, feature-resonated deep neural network,
M. Shen, K.-L. Tsui, M. A. Nussbaum, S. Kim, and F. Lure, “An indoor fall monitoring system: Robust, multistatic radar sensing and explainable, feature-resonated deep neural network,” IEEE J. Biomed. Health Inform., vol. 27, no. 4, pp. 1891–1902, Apr. 2023
1902
-
[44]
Velocity vector synthesis method based on distributed millimeter wave radar system,
M. Ling, Y. Mao, and L. Zhao, “Velocity vector synthesis method based on distributed millimeter wave radar system,” in 2024 16th Int. Conf. Commun. Softw. Netw. (ICCSN), Dec. 2024, pp. 317–322
2024
-
[45]
Short- range indoor positioning and tracking under monochromatic illuminations,
R. Cai, C. Zhu, Y. Yu, X. Zhi, Z. Zhu, and L. Ran, “Short- range indoor positioning and tracking under monochromatic illuminations,” IEEE Trans. Microw. Theory Techn., vol. 73, no. 10, pp. 8106–8117, May 2025. 15
2025
-
[46]
Survey of maneuvering target track- ing. part i. dynamic models,
X. Rong Li and V. Jilkov, “Survey of maneuvering target track- ing. part i. dynamic models,” IEEE Trans. Aerosp. Electron. Syst., vol. 39, no. 4, pp. 1333–1364, Oct. 2003
2003
-
[47]
Bar-Shalom, X
Y. Bar-Shalom, X. R. Li, and T. Kirubarajan, Estimation with Applications to Tracking and Navigation: Theory Algorithms and Software. Hoboken, NJ, USA: John Wiley & Sons, Aug. 2004
2004
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.