Robust Fleet Sizing for Multi-UAV Inspection Missions under Synchronized Replacement Demand
Pith reviewed 2026-05-10 08:41 UTC · model grok-4.3
The pith
Multi-UAV fleets need k = m(ceil(R) + 1) drones to stay reliable when battery depletions synchronize.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
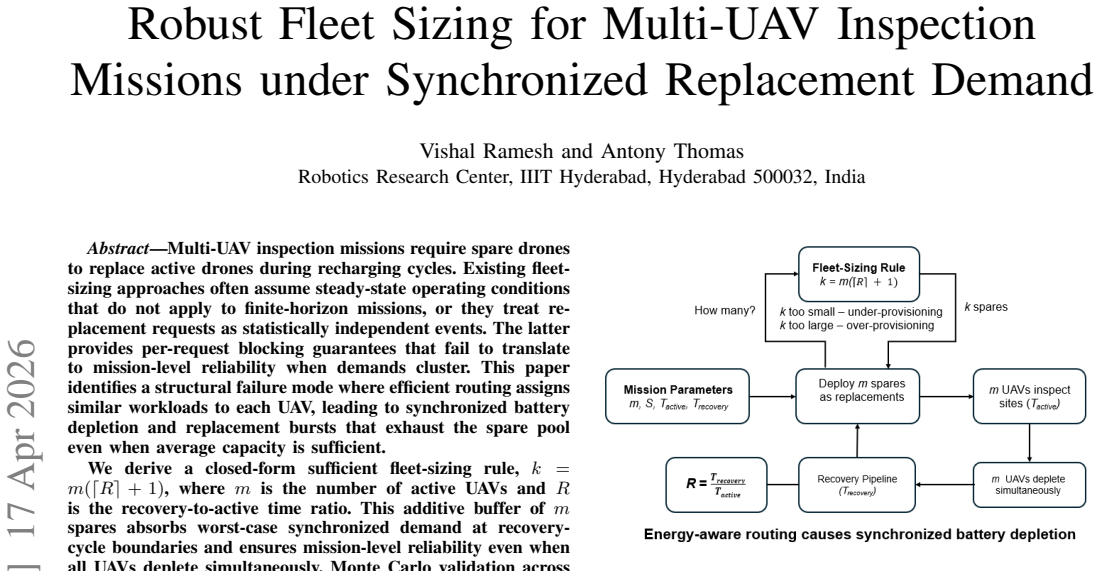
The paper identifies a structural failure mode in which efficient routing produces synchronized battery depletion across the fleet, causing replacement demands to cluster at recovery-cycle boundaries and exhaust the spare pool even when average capacity is sufficient. It derives the sufficient fleet size k = m(ceil(R) + 1), where m is the number of active UAVs and R is the recovery-to-active time ratio; the formula supplies an additive buffer of m spares that absorbs the maximum simultaneous demand. Monte Carlo validation across m in [2,10] and R in [0.87,3.39] shows 99.8 percent mission success, including under wind variability, compared with 69.9 percent for Erlang-B sizing at the highestR
What carries the argument
The closed-form fleet-sizing rule k = m(ceil(R) + 1) that supplies an additive buffer of m spares to cover worst-case synchronized replacement demands at recovery-cycle boundaries.
If this is right
- Mission success reaches 99.8 percent across all tested m and R values even when every UAV depletes at once.
- Only four extra drones are required in the most demanding scenario with R = 3.39.
- The rule continues to work when wind variability reaches a coefficient of variation of 0.30.
- It outperforms Erlang-B sizing that targets 1 percent per-request blocking but drops to 69.9 percent mission success at high R.
Where Pith is reading between the lines
- Routing algorithms that deliberately stagger paths to desynchronize depletion could reduce the needed buffer below the formula's conservative size.
- The same buffer logic may apply to other systems with periodic recharge demands, such as shared electric-vehicle fleets or teams of ground robots.
- Real deployments with measured route differences would test whether the formula can be tightened without losing the worst-case guarantee.
Load-bearing premise
Battery depletion cycles are deterministic or highly correlated with a known fixed ratio R so that the worst synchronization occurs exactly at recovery-cycle boundaries.
What would settle it
A Monte Carlo run or field trial in which depletion times are randomized with high variance so that simultaneous replacements never occur, then checking whether mission success stays high with a fleet smaller than k = m(ceil(R) + 1).
Figures




read the original abstract
Multi-UAV inspection missions require spare drones to replace active drones during recharging cycles. Existing fleet-sizing approaches often assume steady-state operating conditions that do not apply to finite-horizon missions, or they treat replacement requests as statistically independent events. The latter provides per-request blocking guarantees that fail to translate to mission-level reliability when demands cluster. This paper identifies a structural failure mode where efficient routing assigns similar workloads to each UAV, leading to synchronized battery depletion and replacement bursts that exhaust the spare pool even when average capacity is sufficient. We derive a closed-form sufficient fleet-sizing rule, k = m(ceil(R) + 1), where m is the number of active UAVs and R is the recovery-to-active time ratio. This additive buffer of m spares absorbs worst-case synchronized demand at recovery-cycle boundaries and ensures mission-level reliability even when all UAVs deplete simultaneously. Monte Carlo validation across five scenarios (m in [2, 10], R in [0.87, 3.39], 1000 trials each) shows that Erlang-B sizing with a per-request blocking target epsilon = 0.01 drops to 69.9% mission success at R = 3.39, with 95% of spare exhaustion events concentrated in the top-decile 5-minute demand windows. In contrast, the proposed rule maintains 99.8% success (Wilson 95% lower bound 99.3%) across all tested conditions, including wind variability up to CV = 0.30, while requiring only four additional drones in the most demanding scenario.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper identifies a structural failure mode in multi-UAV inspection missions where efficient routing induces synchronized battery depletion and clustered replacement demands that can exhaust spares even when average capacity suffices. It derives a closed-form sufficient fleet-sizing rule k = m(ceil(R) + 1) (m active UAVs, R recovery-to-active time ratio) that adds an m-spare buffer to absorb worst-case simultaneous depletion at recovery-cycle boundaries. Monte Carlo validation (five scenarios, m in [2,10], R in [0.87,3.39], 1000 trials each, wind CV up to 0.30) shows the rule achieves 99.8% mission success versus 69.9% for Erlang-B sizing at epsilon=0.01.
Significance. If the result holds, the closed-form rule supplies a practical, conservative guarantee for finite-horizon UAV fleet sizing that directly targets the synchronization failure mode missed by steady-state queuing models. The parameter-free derivation and the scale of the Monte Carlo evidence (including variability) constitute clear strengths, offering both analytical insight and reproducible empirical support for near-certain mission reliability.
major comments (2)
- The central derivation of the sufficient condition k = m(ceil(R) + 1) is presented as arising from worst-case analysis of cycle boundaries, yet the manuscript provides limited explicit steps showing how the ceil(R) term and the additive buffer of m are obtained from the boundary conditions; this gap is load-bearing because the claim of sufficiency rests on that analysis.
- The derivation assumes deterministic or highly correlated depletion cycles with a known fixed R such that worst-case synchronization occurs exactly at recovery-cycle boundaries. While Monte Carlo trials incorporate CV up to 0.30, the paper should quantify sensitivity to route-induced desynchronization or R-estimation error, as violation of this assumption could render the buffer either oversized or insufficient.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and positive overall assessment of the manuscript. We address each major comment below with specific responses and indicate where revisions will be made to strengthen the paper.
read point-by-point responses
-
Referee: The central derivation of the sufficient condition k = m(ceil(R) + 1) is presented as arising from worst-case analysis of cycle boundaries, yet the manuscript provides limited explicit steps showing how the ceil(R) term and the additive buffer of m are obtained from the boundary conditions; this gap is load-bearing because the claim of sufficiency rests on that analysis.
Authors: We agree that the derivation would benefit from more explicit steps to clarify the origin of both terms. In the revised manuscript we will expand the relevant section (and add a short appendix if needed) with a step-by-step walkthrough: (1) define the active and recovery intervals and the ratio R; (2) show that under perfect synchronization the depletion events of all m UAVs align exactly at cycle boundaries separated by ceil(R) intervals; (3) demonstrate that the worst-case burst at such a boundary requires m simultaneous replacements; and (4) conclude that an additive buffer of m spares is therefore sufficient to absorb the burst while preserving mission continuity. This will make the sufficiency argument fully transparent. revision: yes
-
Referee: The derivation assumes deterministic or highly correlated depletion cycles with a known fixed R such that worst-case synchronization occurs exactly at recovery-cycle boundaries. While Monte Carlo trials incorporate CV up to 0.30, the paper should quantify sensitivity to route-induced desynchronization or R-estimation error, as violation of this assumption could render the buffer either oversized or insufficient.
Authors: The high-correlation assumption is intentional because it captures the structural failure mode induced by efficient routing; the Monte Carlo experiments already embed wind variability (CV up to 0.30) that produces partial desynchronization. Nevertheless, we accept that an explicit sensitivity study would be useful. In the revision we will add a dedicated subsection that (a) varies the pairwise correlation of depletion times from 0.6 to 1.0 while keeping the same marginal distributions and (b) injects bounded estimation error into R. The results will show that the proposed rule remains conservative (i.e., the buffer is never insufficient) under these perturbations, while also quantifying the degree of over-provisioning when correlation drops. This directly addresses the referee's concern. revision: yes
Circularity Check
No significant circularity identified
full rationale
The paper presents the closed-form rule k = m(ceil(R) + 1) as a sufficient condition derived from worst-case analysis of synchronized battery depletion at recovery-cycle boundaries, where the additive buffer of m spares is justified by the structural failure mode of correlated cycles induced by efficient routing. This is not obtained by fitting parameters to data subsets, renaming empirical patterns, or invoking self-citations for uniqueness theorems; the derivation relies on deterministic cycle ratios R and boundary synchronization assumptions that are stated explicitly and tested via independent Monte Carlo simulations (1000 trials, varying m, R, and CV). No load-bearing step reduces to a self-definitional input or fitted prediction by construction, and the validation (99.8% success vs. Erlang-B degradation) is external to the formula itself.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Battery depletion follows recovery-to-active cycles with fixed ratio R, allowing synchronization at cycle boundaries
- domain assumption Replacement demands can cluster maximally at recovery-cycle boundaries in efficient routing
Reference graph
Works this paper leans on
-
[1]
Persistent UA V service: An improved scheduling formulation and prototypes of system components,
B. D. Song, J. Kim, J. Kim, H. Park, J. R. Morrison, and D. H. Shim, “Persistent UA V service: An improved scheduling formulation and prototypes of system components,”J. Intell. Robot. Syst., vol. 74, no. 1–2, pp. 221–232, 2014
work page 2014
-
[2]
Persistent monitoring with refueling on a terrain using a team of aerial and ground robots,
P. Maini, K. Yu, P. B. Sujit, and P. Tokekar, “Persistent monitoring with refueling on a terrain using a team of aerial and ground robots,” inProc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS), 2018, pp. 1–8
work page 2018
-
[3]
Scheduling spare drones for persistent task performance under energy constraints,
E. Hartuv, N. Agmon, and S. Kraus, “Scheduling spare drones for persistent task performance under energy constraints,” inProc. 17th Int. Conf. Auton. Agents Multiagent Syst. (AAMAS), Stockholm, Sweden, 2018, pp. 532–540
work page 2018
-
[4]
A. K. Erlang, “Solution of some problems in the theory of probabilities of significance in automatic telephone exchanges,”Post Office Electr. Eng. J., vol. 10, pp. 189–197, 1917
work page 1917
-
[5]
A survey on coverage path planning for robotics,
E. Galceran and M. Carreras, “A survey on coverage path planning for robotics,”Robot. Auton. Syst., vol. 61, no. 12, pp. 1258–1276, 2013
work page 2013
-
[6]
Multi- UA V routing for area coverage and remote sensing with minimum time,
G. S. Avellar, G. A. S. Pereira, L. C. A. Pimenta, and P. Iscold, “Multi- UA V routing for area coverage and remote sensing with minimum time,” Sensors, vol. 15, no. 11, pp. 27783–27803, 2015
work page 2015
-
[7]
Battery assignment and schedul- ing for drone delivery businesses,
S. Park, L. Zhang, and S. Chakraborty, “Battery assignment and schedul- ing for drone delivery businesses,” inProc. IEEE/ACM Int. Symp. Low Power Electron. Design (ISLPED), 2017
work page 2017
-
[8]
Some properties of the Erlang loss function,
D. L. Jagerman, “Some properties of the Erlang loss function,”Bell Syst. Tech. J., vol. 53, no. 3, pp. 525–551, 1974
work page 1974
-
[9]
F. P. Kelly,Reversibility and Stochastic Networks. Wiley, 1979
work page 1979
-
[10]
Stationary-process approximations for the nonstationary Erlang loss model,
W. A. Massey and W. Whitt, “Stationary-process approximations for the nonstationary Erlang loss model,”Oper. Res., vol. 44, no. 6, pp. 976– 983, 1996
work page 1996
-
[11]
A. Li and W. Whitt, “Approximate blocking probabilities in loss mod- els with independence and distribution assumptions relaxed,”Perform. Eval., vol. 80, pp. 82–101, 2014
work page 2014
-
[12]
C. Bandi, D. Bertsimas, and N. Youssef, “Robust queueing theory,”Oper. Res., vol. 63, no. 3, pp. 676–700, 2015
work page 2015
-
[13]
UA Vs that fly forever: Uninterrupted structural inspection through automatic UA V replace- ment,
M. Erdelj, O. Saif, E. Natalizio, and I. Fantoni, “UA Vs that fly forever: Uninterrupted structural inspection through automatic UA V replace- ment,”Ad Hoc Netw., vol. 94, p. 101612, 2019
work page 2019
-
[14]
A review of collaborative air–ground robots research,
C. Liu, J. Zhao, and N. Sun, “A review of collaborative air–ground robots research,”J. Intell. Robot. Syst., vol. 106, no. 60, pp. 1–28, 2022
work page 2022
-
[15]
Risk-aware UA V-UGV rendezvous with chance-constrained Markov decision process,
G. Shi, N. Karapetyan, A. B. Asghar, J.-P. Reddinger, J. Dotterweich, J. Humann, and P. Tokekar, “Risk-aware UA V-UGV rendezvous with chance-constrained Markov decision process,” inProc. 61st IEEE Conf. Decis. Control (CDC), 2022
work page 2022
-
[16]
Probable inference, the law of succession, and statistical inference,
E. B. Wilson, “Probable inference, the law of succession, and statistical inference,”J. Amer. Statist. Assoc., vol. 22, no. 158, pp. 209–212, 1927
work page 1927
-
[17]
Approximate is better than ‘exact’ for interval estimation of binomial proportions,
A. Agresti and B. A. Coull, “Approximate is better than ‘exact’ for interval estimation of binomial proportions,”Amer. Statist., vol. 52, no. 2, pp. 119–126, 1998
work page 1998
-
[18]
A. Ben-Tal, L. El Ghaoui, and A. Nemirovski,Robust Optimization. Princeton Univ. Press, 2009
work page 2009
-
[19]
D. Bertsimas and M. Sim, “The price of robustness,”Oper. Res., vol. 52, no. 1, pp. 35–53, 2004
work page 2004
-
[20]
Robust control of Markov decision processes with uncertain transition matrices,
A. Nilim and L. El Ghaoui, “Robust control of Markov decision processes with uncertain transition matrices,”Oper. Res., vol. 53, no. 5, pp. 780–798, 2005
work page 2005
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.