A Practical Guide to PID Controller Implementation
Pith reviewed 2026-05-10 08:02 UTC · model grok-4.3
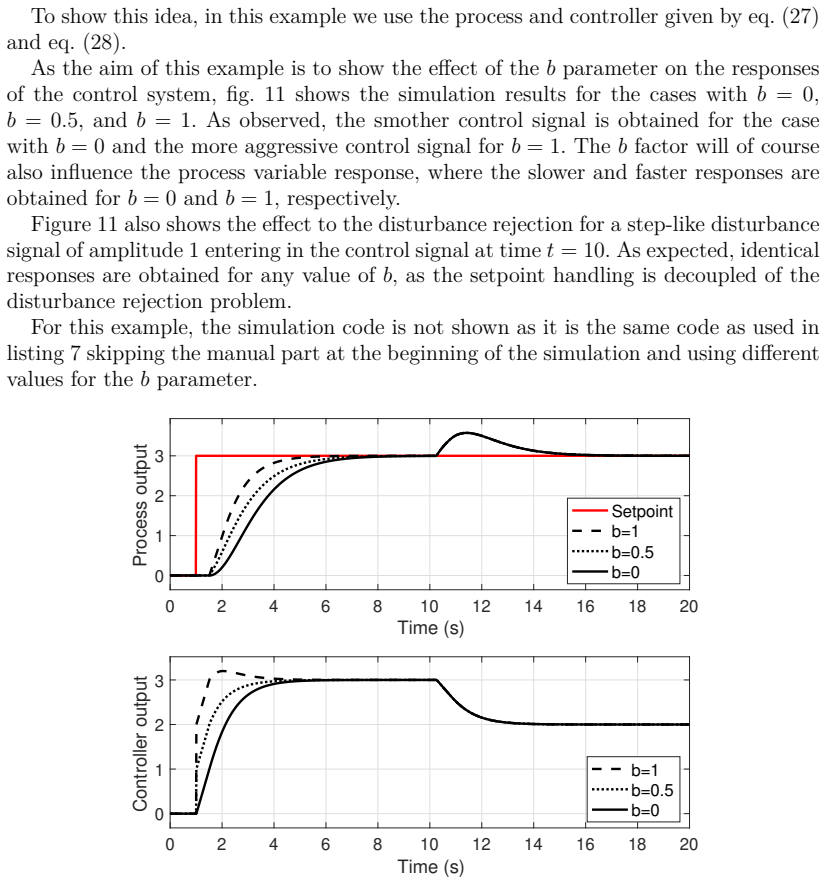
The pith
A reference PID controller implementation accounts for actuator limits, noise, and bumpless transfer that break the basic formula.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The authors supply a reference PID implementation, expressed in pseudo-code, that incorporates handling for actuator limitations, measurement noise, P/PI/PD/PID structures, bumpless transfer, and time-varying sampling. The code is accompanied by explanations of each implementation choice and is exercised on a set of simulation test cases chosen to expose the most common practical failure modes.
What carries the argument
The reference pseudo-code implementation that integrates anti-windup, noise filtering, structure selection, and bumpless-transfer logic into a single PID controller.
If this is right
- Engineers obtain a ready-to-use PID structure that prevents integrator windup and mode bumps without separate logic.
- The same code base supports P-only, PI, PD, and full PID forms by simple parameter selection.
- Varying sampling intervals are accommodated without retuning or loss of stability margins.
- Simulations demonstrate that the filtered version rejects measurement noise while preserving setpoint tracking.
Where Pith is reading between the lines
- Adoption of this reference could reduce the frequency of custom PID patches that later cause maintenance problems.
- The test-case set highlights failure modes that future controller benchmarks might usefully adopt as standard checks.
- Extensions to multivariable or gain-scheduled PID would follow the same modular structure shown in the pseudo-code.
Load-bearing premise
The chosen set of practical issues, code structure, and test cases is representative enough that most real applications can use the reference with little or no extra customization.
What would settle it
A documented industrial or simulated case in which the supplied reference code produces instability, excessive actuator wear, or loss of performance that is directly traceable to an issue the paper left unaddressed.
Figures















read the original abstract
How difficult can it be to implement a PID controller? The answer is twofold. Implementing the PID control law is simple and computationally inexpensive. However, this basic form will not work in practical applications. The primary reason for this is the various physical limitations of the actuator. Measurement noise, different implementations depending on the various structures (P, PI, PD or PID), bumpless transfer, and varying sampling time also result in problems rendering the basic form inoperable. PID implementation is therefore more difficult than meets the eye. This paper introduces a reference implementation of the PID controller which considers these practical issues. It includes pseudo-code, discussion of the implementation choices and simulation of carefully selected, important test cases.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that while the basic PID control law is simple and inexpensive to implement, practical issues such as actuator saturation, measurement noise, bumpless transfer, variable sampling times, and different controller structures (P/PI/PD/PID) render it inoperable in real applications. It introduces a reference implementation addressing these via pseudo-code, discusses the implementation choices, and validates the approach through simulations of selected test cases.
Significance. If the pseudo-code correctly incorporates the listed practical fixes without internal inconsistencies and the simulations demonstrate their effects on the chosen cases, the work provides a concrete, usable reference that bridges theoretical PID design and deployable code. This could be a helpful resource for control engineers, particularly given the modest, descriptive scope that avoids claiming optimality or universality.
minor comments (3)
- [Abstract] Abstract: the phrasing 'this basic form will not work in practical applications' is absolute; consider qualifying it as 'often fails' or 'requires modifications' to better reflect that the issues are common but not universal.
- The pseudo-code presentation would benefit from explicit line-by-line annotations or comments highlighting how each practical issue (e.g., saturation, noise filtering) is handled.
- [Simulations] Simulations section: clarify the criteria used to select the 'carefully selected, important test cases' and consider adding at least one quantitative metric (e.g., overshoot or settling time) comparing the reference implementation to the basic form.
Simulated Author's Rebuttal
We thank the referee for their positive assessment of the manuscript and the recommendation for minor revision. The referee summary accurately captures the paper's scope and contributions. No specific major comments were listed in the report.
Circularity Check
No significant circularity; self-contained practical reference
full rationale
The paper supplies a descriptive reference implementation of PID control with pseudo-code, implementation choices, and selected test cases for standard practical issues (actuator limits, noise, bumpless transfer, variable sampling). No derivations, fitted parameters, predictions, or equations are present. All content draws on established practices without self-referential reduction, self-citation chains, or renaming of results as new derivations. The central claim is simply that one concrete, workable implementation addressing the listed issues is provided; this holds by direct presentation rather than by construction from its own inputs.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Standard PID control structures and actuator saturation models are taken as known from prior literature.
Reference graph
Works this paper leans on
-
[1]
Åström, K., & Hägglund, T. (2006).Advanced PID control. Research Triangle Park, North Carolina, USA: ISA - The Instrumentation, Systems and Automation Society. Åström, K., & Wittenmark, B. (1997).Computer-controlled systems: Theory and design(3rd ed.). Upper Saddle River, New Jersey, USA: Prentice Hall. Åström, K. J., & Hägglund, T. (2001). The future of ...
work page 2006
-
[2]
IEC. (2010).IEC 60546-1:2010,Controllers with analogue signals for use in industrial-process control systems(Tech. Rep.). Geneva, Switzerland: International Electrotechnical Commis- sion. ISA. (2023).ISA-TR5.9-2023, Proportional-Integral-Derivative (PID) Algorithms and Per- formance(Tech. Rep.). Research Triangle Park, NC, USA: International Society of Au...
work page 2010
-
[3]
Uzunović, T., Zunic, E., Badnjević, A., Mioković, I., & Konjicija, S. (2010). Implementation of digital PID controller. InThe 33rd international convention MIPRO(pp. 1357–1361). Visioli, A. (2003). Modified anti-windup scheme for PID controllers.IEE Proceedings–control theory and applications,150(1), 49–54. Visioli, A. (2006).Practical PID control. Berlin...
work page 2010
-
[4]
functions are orange. They can be set and updated in various ways, such as being passed as arguments (by value or reference) or retrieved from memory within the function. The specific mechanism is left to the implementer. To facilitate readability, block indentation are used, but not strictly needed to avoid ambiguity. Our pseudo-code assumes availability...
work page 1997
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.