Emergency Stopping for Liquid-manipulating Robots
Pith reviewed 2026-05-10 08:04 UTC · model grok-4.3
The pith
A model predictive control layer generates time-optimal spill-free emergency stops for robots carrying open liquid containers.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
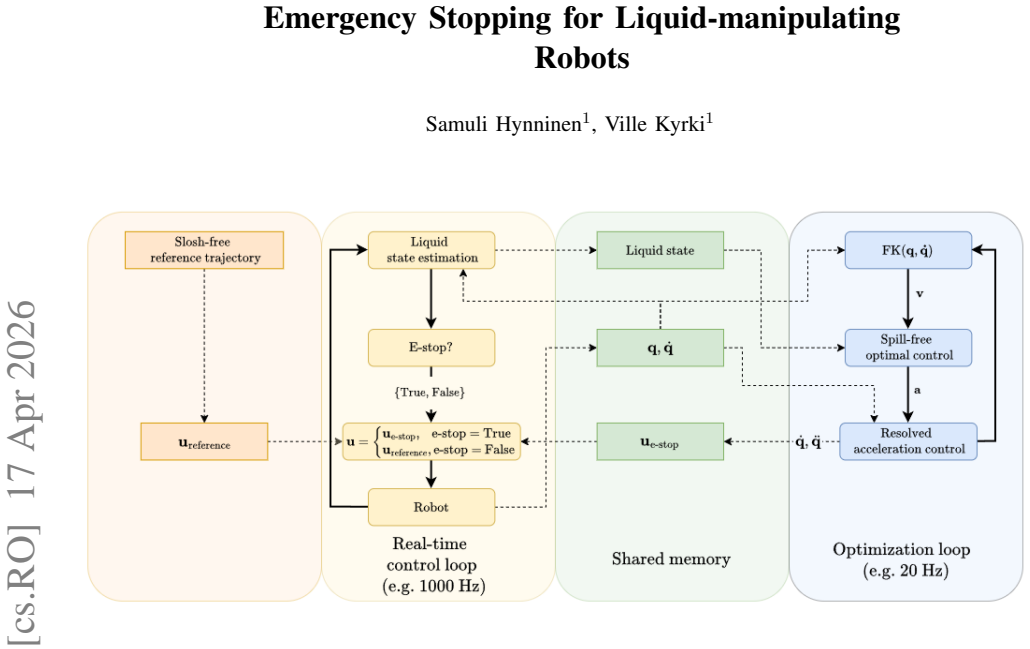
Emergency stopping for liquid-manipulating robots can be cast as a time-optimal optimal control problem solved in a model predictive control framework that accounts for nonlinear liquid dynamics, yielding trajectories that bring the robot to rest rapidly without spilling; the resulting module functions as a plug-and-play safety layer on top of any existing slosh-free motion planner.
What carries the argument
The model predictive control optimization that minimizes stopping time subject to constraints derived from a nonlinear model of liquid sloshing dynamics.
If this is right
- The layer reacts instantly to detected hazards while preserving the liquid.
- It works on top of any prior slosh-free planner without requiring changes to that planner.
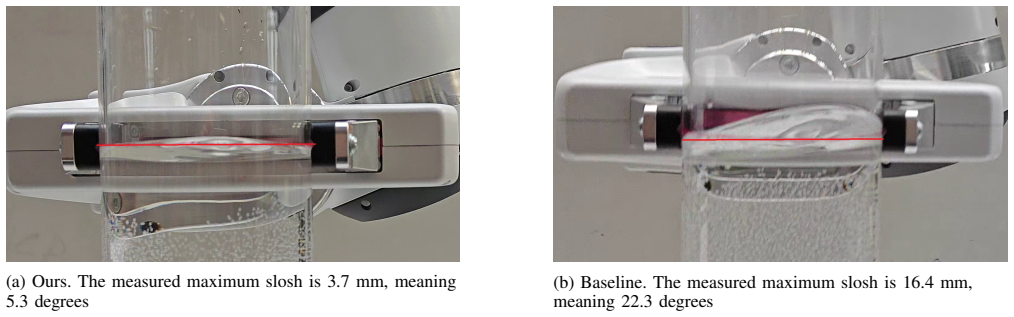
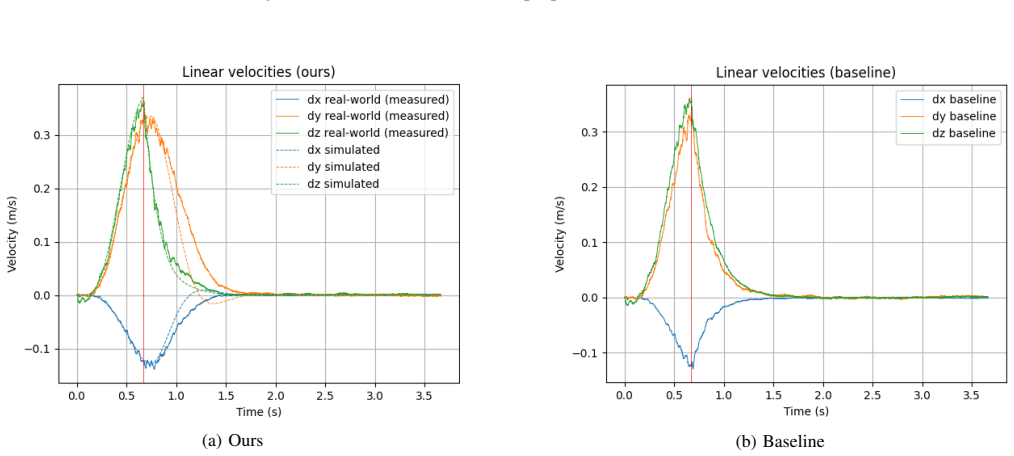
- Simulation and hardware tests on a 7-DoF arm confirm fast stopping times are reached without spills.
- The formulation directly encodes nonlinear liquid behavior rather than relying on conservative limits.
Where Pith is reading between the lines
- The same optimization structure could be applied to other unstable payloads whose dynamics can be modeled, such as granular materials.
- Coupling the stop planner with online perception for hazard detection would allow fully reactive behavior in unstructured settings.
- Reducing reliance on slow, overly cautious motions becomes feasible once reliable emergency stops are available.
Load-bearing premise
A sufficiently accurate model of the nonlinear liquid dynamics must exist and remain usable inside real-time optimization to guarantee spill-free stopping.
What would settle it
A physical trial in which the robot executes the computed stopping trajectory yet still spills liquid due to model error or unaccounted effects would show the method does not deliver guaranteed spill-free performance.
Figures
read the original abstract
Manipulating open liquid containers is challenging because liquids are highly sensitive to vessel accelerations and jerks. Although spill-free liquid manipulation has been widely studied, emergency stopping under unexpected hazards has received little attention, despite the fact that abrupt braking may cause hazardous spills. This letter presents an emergency stop system for robots manipulating liquids in open containers. We formulate emergency stopping as an optimal control problem and solve it in a model predictive control framework to generate time-optimal, spill-free stopping trajectories. The method operates as a plug-and-play safety layer on top of existing slosh-free motion planning methods, enabling immediate reaction to detected hazards while accounting for nonlinear liquid dynamics. We demonstrate, through simulation and on a 7-DoF Franka Emika Panda robot, that the proposed approach achieves fast emergency stopping without spilling.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents an emergency stop system for robots manipulating open liquid containers. It formulates emergency stopping as an optimal control problem solved via model predictive control (MPC) to generate time-optimal, spill-free stopping trajectories. The approach is positioned as a plug-and-play safety layer atop existing slosh-free planners and is demonstrated in simulation and on a 7-DoF Franka Emika Panda robot.
Significance. If the central claims hold, the work addresses a practical safety gap in liquid manipulation by enabling rapid hazard response without spills. The plug-and-play integration and real-hardware demonstration on the Franka Panda are clear strengths. The significance is reduced by the absence of quantitative model-validation data and robustness tests, which are needed to substantiate that the MPC trajectories remain spill-free under realistic conditions.
major comments (2)
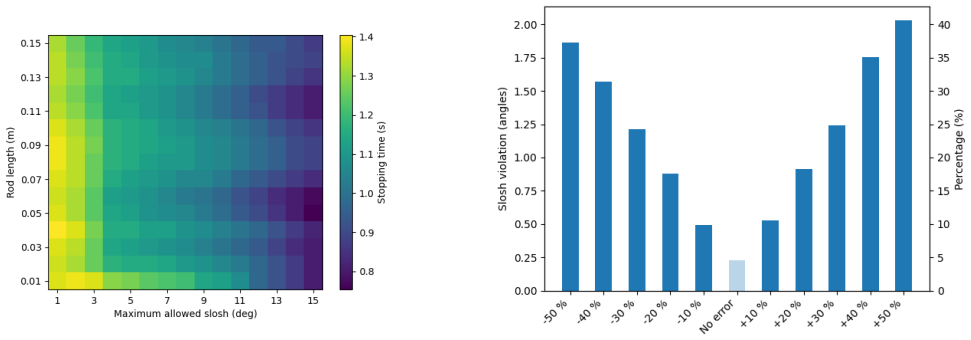
- [Experiments] The central claim of spill-free emergency stopping on hardware rests on the fidelity of the nonlinear liquid dynamics model inside the real-time MPC. The manuscript reports success on the Franka Panda but provides no quantitative model-validation metrics (e.g., predicted vs. measured slosh height or volume) or sensitivity analysis to parameter variations such as fill level or viscosity.
- [Experiments] The real-robot trials do not include deliberate model-mismatch tests or unmodeled-effect trials (e.g., changes in container geometry or surface tension). Because liquid sloshing is sensitive to these factors, the time-optimal MPC solutions could still produce overflow when the model deviates from reality, undermining the guarantee of spill-free stopping.
minor comments (2)
- [Abstract] The abstract states that the method accounts for nonlinear liquid dynamics but does not name the specific reduced-order model or its governing equations.
- [Method] Clarify the exact optimization constraints (e.g., jerk limits, container acceleration bounds) used inside the MPC to achieve the reported stopping times.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and for recognizing the practical value of our emergency stopping approach. We address each major comment below and have revised the manuscript to strengthen the experimental validation sections.
read point-by-point responses
-
Referee: [Experiments] The central claim of spill-free emergency stopping on hardware rests on the fidelity of the nonlinear liquid dynamics model inside the real-time MPC. The manuscript reports success on the Franka Panda but provides no quantitative model-validation metrics (e.g., predicted vs. measured slosh height or volume) or sensitivity analysis to parameter variations such as fill level or viscosity.
Authors: We agree that quantitative model-validation metrics would strengthen the central claims. The nonlinear liquid model is taken from established sloshing literature and the hardware trials on the Franka Emika Panda demonstrate spill-free stopping under the tested conditions. In the revised manuscript we have added simulation-based quantitative validation, including direct comparisons of MPC-predicted versus simulated slosh heights across multiple fill levels and viscosities, together with sensitivity analysis plots. Hardware validation remains indirect because our experimental setup lacks high-speed vision for real-time slosh measurement; we have added an explicit discussion of this limitation. revision: yes
-
Referee: [Experiments] The real-robot trials do not include deliberate model-mismatch tests or unmodeled-effect trials (e.g., changes in container geometry or surface tension). Because liquid sloshing is sensitive to these factors, the time-optimal MPC solutions could still produce overflow when the model deviates from reality, undermining the guarantee of spill-free stopping.
Authors: We acknowledge that the original hardware trials were performed under nominal conditions matching the model. To address model-mismatch concerns we have added simulation experiments that deliberately vary container geometry and surface-tension parameters while verifying that the generated trajectories remain spill-free within the tested deviation range. We have also included additional hardware trials with altered fill levels (which affect effective dynamics) and report no spills. The revised manuscript now contains these results and a discussion clarifying that the method provides practical safety rather than a theoretical guarantee against arbitrary unmodeled effects. revision: yes
Circularity Check
No circularity: standard MPC formulation independent of inputs
full rationale
The paper formulates emergency stopping as a standard optimal control problem solved in an MPC framework to generate spill-free trajectories, drawing on established nonlinear dynamics modeling and real-time optimization principles. No derivation step reduces a claimed prediction or result to a fitted parameter, self-definition, or self-citation chain by construction. The simulation and robot demonstrations serve as external empirical validation rather than tautological outputs. The central claim remains falsifiable via model mismatch tests outside the paper's own fitted values, satisfying the criteria for a self-contained, non-circular derivation.
Axiom & Free-Parameter Ledger
free parameters (2)
- MPC cost weights
- Liquid model parameters
axioms (1)
- domain assumption Nonlinear liquid dynamics can be modeled accurately enough for real-time prediction and constraint satisfaction.
Reference graph
Works this paper leans on
-
[1]
Clutter-aware spill-free liquid transport via learned dynamics,
A. Abderezaei, A. Pasricha, A. Klausenstock, and A. Roncone, “Clutter-aware spill-free liquid transport via learned dynamics,” in 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2024, pp. 9908–9915
work page 2024
-
[2]
W. Aribowo, T. Yamashita, and K. Terashima, “Integrated trajectory planning and sloshing suppression for three-dimensional motion of liquid container transfer robot arm,”Journal of Robotics, vol. 2015, no. 1, p. 279460, 2015
work page 2015
-
[3]
Geometric slosh-free tracking for robotic manipulators,
J. Arrizabalaga, L. Pries, R. Laha, R. Li, S. Haddadin, and M. Ryll, “Geometric slosh-free tracking for robotic manipulators,” in2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 1226–1232
work page 2024
-
[4]
Time-optimal trajectory planning for anti-sloshing 2-dimensional motions of an industrial robot,
R. Di Leva, M. Carricato, H. Gattringer, and A. M ¨uller, “Time-optimal trajectory planning for anti-sloshing 2-dimensional motions of an industrial robot,” in2021 20th International Conference on Advanced Robotics (ICAR). IEEE, 2021, pp. 32–37
work page 2021
-
[5]
Robotic handling of liquids with spilling avoidance: a constraint-based control approach,
R. Maderna, A. Casalino, A. M. Zanchettin, and P. Rocco, “Robotic handling of liquids with spilling avoidance: a constraint-based control approach,” in2018 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2018, pp. 7414–7420
work page 2018
-
[6]
Control of liquid handling robotic systems: A feed-forward approach to suppress sloshing,
L. Moriello, L. Biagiotti, C. Melchiorri, and A. Paoli, “Control of liquid handling robotic systems: A feed-forward approach to suppress sloshing,” in2017 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2017, pp. 4286–4291
work page 2017
-
[7]
A solution to slosh-free robot trajectory optimization,
R. I. C. Muchacho, R. Laha, L. F. Figueredo, and S. Haddadin, “A solution to slosh-free robot trajectory optimization,” in2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2022, pp. 223–230
work page 2022
-
[8]
J. Reinhold, M. Amersdorfer, and T. Meurer, “A dynamic optimization approach for sloshing free transport of liquid filled containers using an industrial robot,” in2019 IEEE/RSJ international conference on intelligent robots and systems (IROS). IEEE, 2019, pp. 2336–2341
work page 2019
-
[9]
A plug-in feed-forward control for sloshing suppression in robotic teleoperation tasks,
L. Biagiotti, D. Chiaravalli, L. Moriello, and C. Melchiorri, “A plug-in feed-forward control for sloshing suppression in robotic teleoperation tasks,” in2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2018, pp. 5855–5860
work page 2018
-
[10]
Q. Zang and J. Huang, “Dynamics and control of three-dimensional slosh in a moving rectangular liquid container undergoing planar excitations,”IEEE Transactions on Industrial Electronics, vol. 62, no. 4, pp. 2309–2318, 2014
work page 2014
-
[11]
Slosh suppression by robust input shaping,
B. Pridgen, K. Bai, and W. Singhose, “Slosh suppression by robust input shaping,” in49th IEEE conference on decision and control (CDC). IEEE, 2010, pp. 2316–2321
work page 2010
-
[12]
Using acceleration compensation to reduce liquid surface oscillation during a high speed transfer,
S. J. Chen, B. Hein, and H. Worn, “Using acceleration compensation to reduce liquid surface oscillation during a high speed transfer,” in Proceedings 2007 IEEE International Conference on Robotics and Automation. IEEE, 2007, pp. 2951–2956
work page 2007
-
[13]
Minimum- time feedforward control of an open liquid container,
L. Consolini, A. Costalunga, A. Piazzi, and M. Vezzosi, “Minimum- time feedforward control of an open liquid container,” inIECON 2013- 39th Annual Conference of the IEEE Industrial Electronics Society. IEEE, 2013, pp. 3592–3597
work page 2013
-
[14]
R. A. Ibrahim,Liquid sloshing dynamics: theory and applications. Cambridge university press, 2005
work page 2005
-
[15]
Recent advances in liquid sloshing dynamics,
R. A. Ibrahim, V . N. Pilipchuk, and T. Ikeda, “Recent advances in liquid sloshing dynamics,” 2001
work page 2001
-
[16]
Hanging tray for single open beverage,
J. Millstein, “Hanging tray for single open beverage,” U.S. Patent US8 220 655B2. [Online]. Available: https://patents.google. com/patent/US8220655B2
-
[17]
Safe stop trajectory planning for highly automated vehicles: An optimal control problem formulation,
L. Svensson, L. Masson, N. Mohan, E. Ward, A. P. Brenden, L. Feng, and M. T ¨orngren, “Safe stop trajectory planning for highly automated vehicles: An optimal control problem formulation,” in2018 IEEE Intelligent V ehicles Symposium (IV). IEEE, 2018, pp. 517–522
work page 2018
-
[18]
Real-time safe stop trajectory planning via multidimensional hybrid a*-algorithm,
L. Wang, Z. Wu, J. Li, and C. Stiller, “Real-time safe stop trajectory planning via multidimensional hybrid a*-algorithm,” in2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC). IEEE, 2020, pp. 1–7
work page 2020
-
[19]
Design and formal verification of a safe stop supervisor for an automated vehicle,
J. Krook, L. Svensson, Y . Li, L. Feng, and M. Fabian, “Design and formal verification of a safe stop supervisor for an automated vehicle,” in2019 International Conference on Robotics and Automation (ICRA). IEEE, 2019, pp. 5607–5613
work page 2019
-
[20]
L. Yang, T. Furukawa, L. Zuo, and Z. Doerzaph, “Control design for automated vehicle emergency safe stop system based on differential dynamic programming,” inDynamic Systems and Control Conference, vol. 84270. American Society of Mechanical Engineers, 2020, p. V001T02A006
work page 2020
-
[21]
Autonomous emergency stop system,
S. Kwon, C. Jung, T. Choi, Y . Oh, and B. You, “Autonomous emergency stop system,” in2014 IEEE Intelligent V ehicles Symposium Proceedings. IEEE, 2014, pp. 444–449
work page 2014
-
[22]
F. Duerr, J. Ziehn, R. Kohlhaas, M. Roschani, M. Ruf, and J. Beyerer, “Realtime global optimization of a fail-safe emergency stop maneuver for arbitrary electrical/electronical failures in automated driving,” in 2020 IEEE 23rd International Conference on Intelligent Transporta- tion Systems (ITSC). IEEE, 2020, pp. 1–8
work page 2020
-
[23]
Colli- sion detection and safe reaction with the dlr-iii lightweight manipulator arm,
A. De Luca, A. Albu-Schaffer, S. Haddadin, and G. Hirzinger, “Colli- sion detection and safe reaction with the dlr-iii lightweight manipulator arm,” in2006 IEEE/RSJ international conference on intelligent robots and systems. IEEE, 2006, pp. 1623–1630
work page 2006
-
[24]
Collision detection and reaction: A contribution to safe physical human-robot interaction,
S. Haddadin, A. Albu-Schaffer, A. De Luca, and G. Hirzinger, “Collision detection and reaction: A contribution to safe physical human-robot interaction,” in2008 IEEE/RSJ international conference on intelligent robots and systems. IEEE, 2008, pp. 3356–3363
work page 2008
-
[25]
H. Chen, B. Xuan, P. Yang, and H. Chen, “A new overhead crane emergency braking method with theoretical analysis and experimental verification,”Nonlinear Dynamics, vol. 98, no. 3, pp. 2211–2225, 2019
work page 2019
-
[26]
Switching-based emergency braking control for an overhead crane system,
B. Ma, Y . Fang, and Y . Zhang, “Switching-based emergency braking control for an overhead crane system,”IET control theory & applica- tions, vol. 4, no. 9, pp. 1739–1747, 2010
work page 2010
-
[27]
B. S. Reddy, “Emergency braking in an overhead crane using sliding mode control under unknown uncertainties and disturbances,” in2024 24th International Conference on Control, Automation and Systems (ICCAS). IEEE, 2024, pp. 1371–1376
work page 2024
-
[28]
Emergency braking control design for a dual cart-trolley overhead crane,
S. Raj and B. S. Reddy, “Emergency braking control design for a dual cart-trolley overhead crane,” in2023 3rd International Conference on Electrical, Computer , Communications and Mechatronics Engineering (ICECCME). IEEE, 2023, pp. 1–6
work page 2023
-
[29]
Resolved-acceleration control of mechanical manipulators,
J. Luh, M. Walker, and R. Paul, “Resolved-acceleration control of mechanical manipulators,”IEEE Transactions on Automatic Control, vol. 25, no. 3, pp. 468–474, 2003
work page 2003
-
[30]
A kinematic notation for lower-pair mechanisms based on matrices,
J. Denavit and R. S. Hartenberg, “A kinematic notation for lower-pair mechanisms based on matrices,” 1955
work page 1955
-
[31]
A simple and systematic approach to assigning denavit– hartenberg parameters,
P. I. Corke, “A simple and systematic approach to assigning denavit– hartenberg parameters,”IEEE transactions on robotics, vol. 23, no. 3, pp. 590–594, 2007
work page 2007
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.