A Safe and Stable Controller for Fuel Cell Systems Using Adaptation and Reference Governors
Pith reviewed 2026-05-10 03:21 UTC · model grok-4.3
The pith
Adaptation combined with Lyapunov-based reference governors ensures stability and safety for first-order systems with parametric uncertainties in fuel cell temperature regulation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
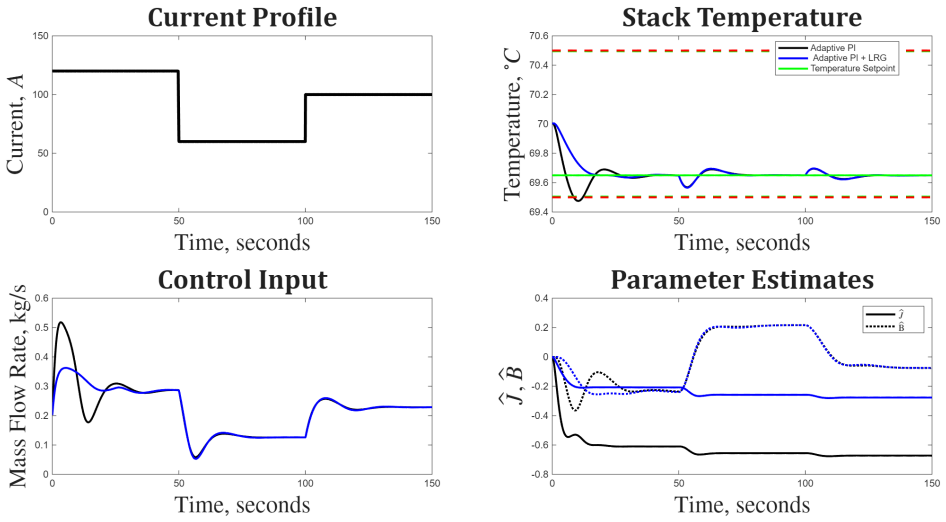
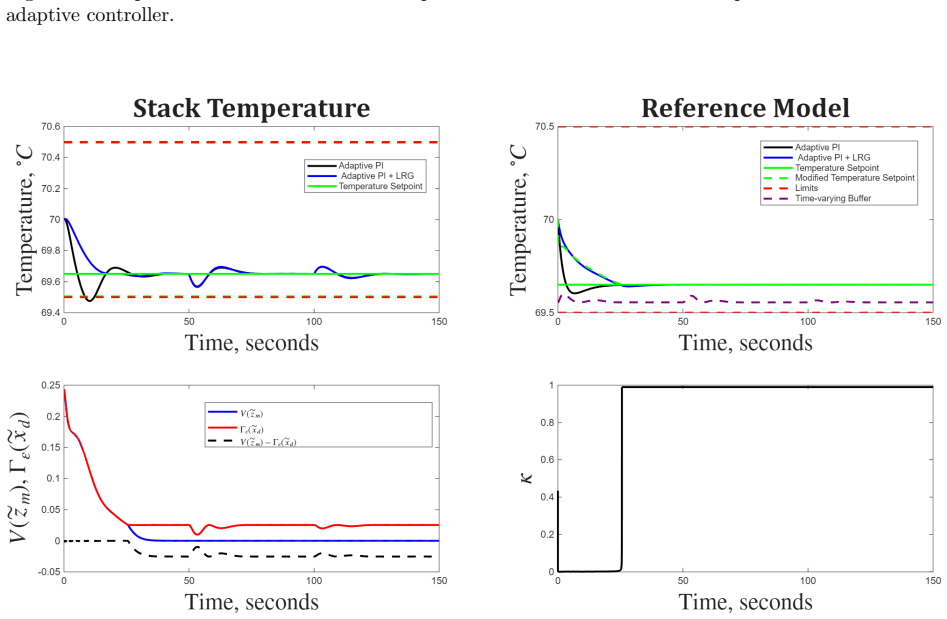
The paper establishes that for first-order systems with parametric uncertainties, adaptation combined with LRGs guarantees asymptotic stability, good control performance, and state constraint satisfaction. This is shown analytically for the general class and verified in simulation on the fuel cell temperature regulation problem, where the proposed architecture succeeds while standard adaptation alone fails to maintain safety.
What carries the argument
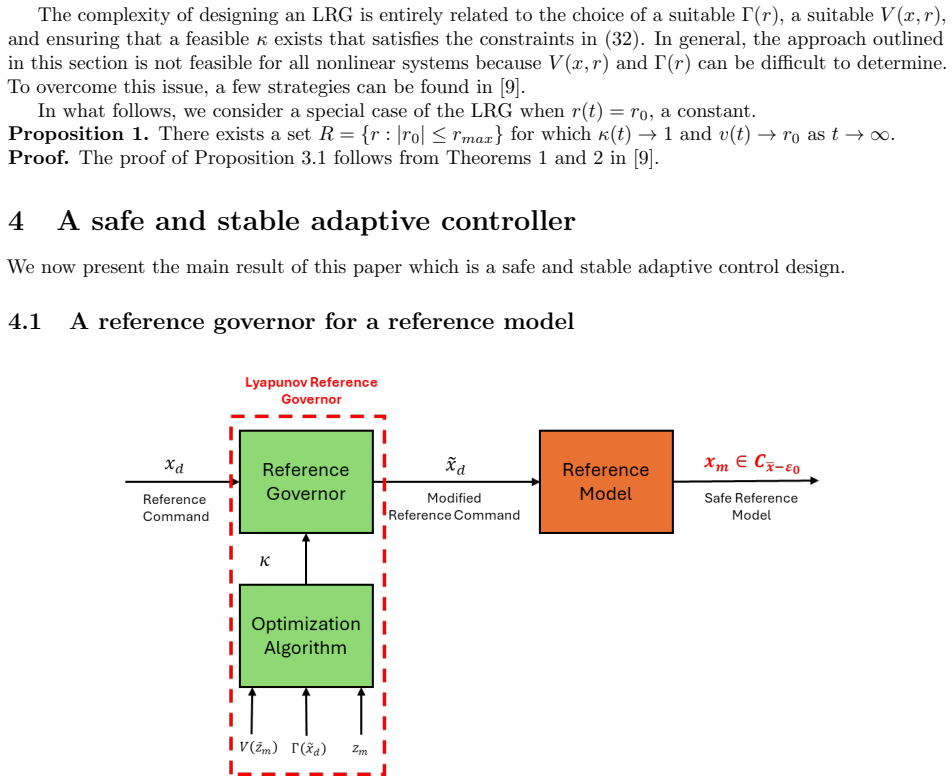
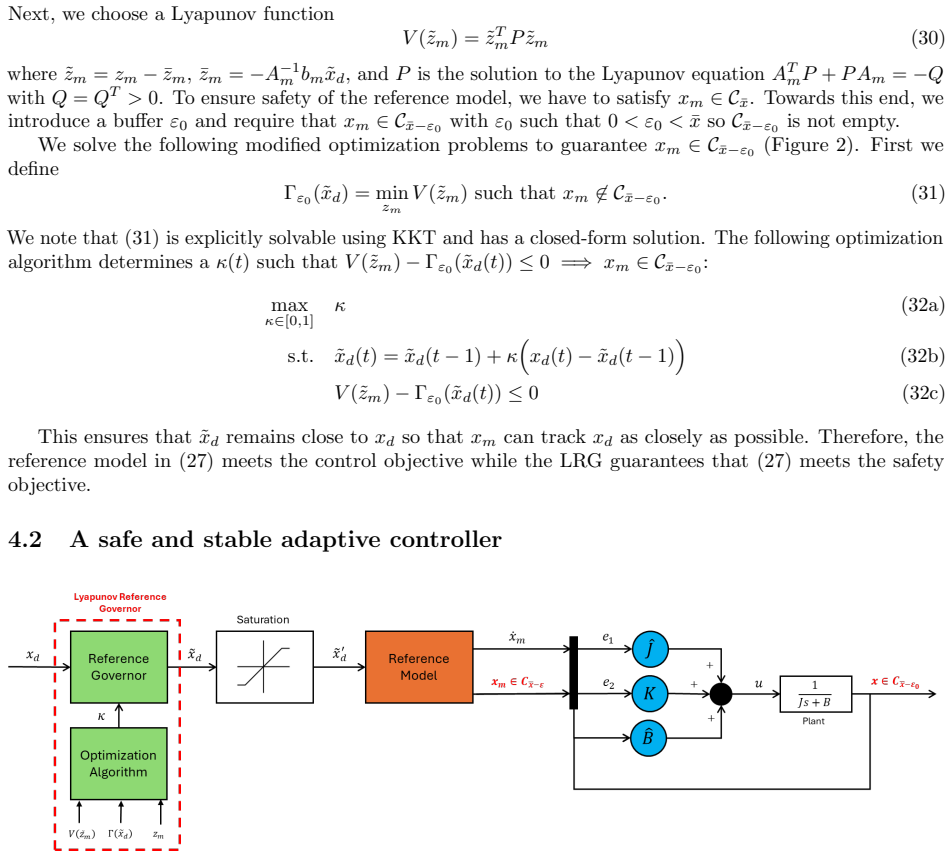
Lyapunov-based Reference Governors that compute feasible reference modifications using a Lyapunov function to enforce state constraints while operating in tandem with an adaptive controller.
If this is right
- The closed-loop system remains asymptotically stable despite parametric uncertainties.
- State constraints such as temperature limits are satisfied while tracking performance is preserved.
- The architecture applies to fuel cell temperature regulation and meets all stated control and safety objectives.
- Standard adaptation without the reference governor fails to enforce the safety constraints.
Where Pith is reading between the lines
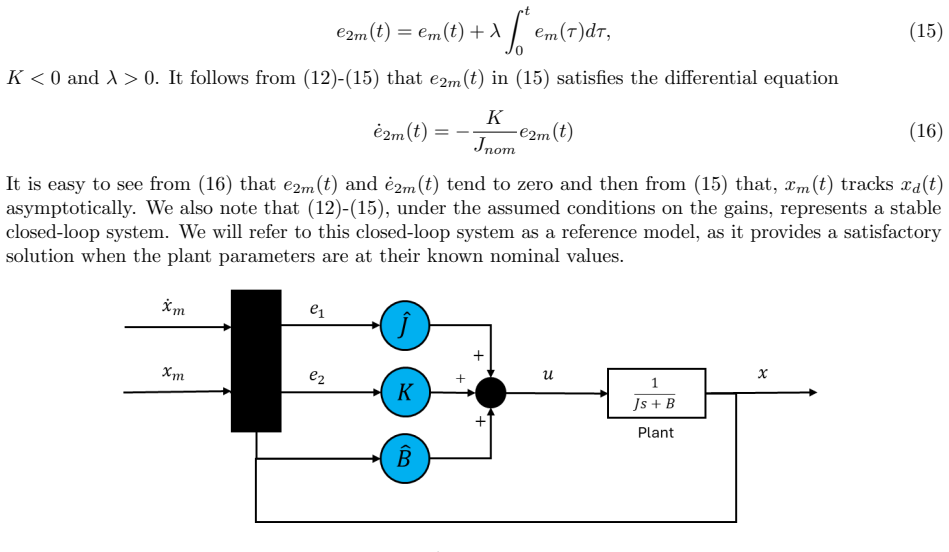
- The modular addition of a reference governor may offer a general retrofit for adding safety to other adaptive controllers on first-order plants.
- Similar guarantees could be investigated for higher-order or nonlinear energy systems where temperature or pressure limits are critical.
- Hardware experiments on an actual fuel cell would test whether unmodeled dynamics erode the theoretical safety margins.
Load-bearing premise
The plant must behave as a first-order system whose uncertain parameters allow both an adaptation law and a reference adjustment rule to be constructed so that states never exceed their limits.
What would settle it
A simulation of the fuel cell model with parameter values well outside the adaptation range in which the temperature still exceeds the prescribed safety bound under the combined controller.
Figures
read the original abstract
This paper proposes a control architecture integrating adaptation with Lyapunov-based Reference Governors (LRGs) to ensure state constraint satisfaction for first-order systems with parametric uncertainties. Adaptation combined with LRGs guarantees stability, ensures good control performance, and remains safe even with parametric uncertainties. Simulations of the fuel cell temperature regulation problem demonstrate that the proposed control architecture successfully meets all control and safety objectives, whereas the standard adaptation fails to achieve the latter.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes integrating parameter adaptation with Lyapunov-based Reference Governors (LRGs) for first-order systems with parametric uncertainties. The central claim is that this architecture guarantees closed-loop stability and state-constraint satisfaction while delivering good performance, even under uncertainties; simulations on a fuel cell temperature regulation problem show the combined controller meets all objectives whereas standard adaptation violates safety constraints.
Significance. If the stability and invariance proofs hold for the time-varying parameter estimates induced by adaptation, the result would provide a practical, Lyapunov-based method for safe adaptive control of uncertain plants, directly addressing constraint violations that commonly arise in applications such as fuel-cell thermal management. The simulation comparison supplies concrete empirical evidence of the safety benefit over non-governed adaptation.
major comments (2)
- [Stability Analysis] Stability Analysis section (likely containing the main theorem on closed-loop invariance): The standard LRG construction ensures V̇ ≤ 0 inside the constraint-admissible set only for frozen parameters. Adaptation introduces time-varying estimates whose derivatives appear in the closed-loop vector field; the manuscript must explicitly bound these extra terms (e.g., via a composite Lyapunov function, slow-adaptation assumption, or redesign of the admissible set) to preserve the non-positivity of V̇ and the invariance of the safe set. Without this step the safety guarantee does not transfer to the combined dynamics.
- [Theorem on combined stability and safety] Theorem on combined stability and safety (or equivalent result): The claim that adaptation plus LRG “guarantees stability … and remains safe” is load-bearing for the paper’s contribution. The proof must be expanded to show that the reference governor’s constraint-admissible set remains positively invariant under the augmented dynamics that include the adaptation law; otherwise the central safety assertion rests on the frozen-parameter case only.
minor comments (2)
- [Abstract and Introduction] The abstract and introduction should explicitly state the plant class (first-order linear system with constant but unknown parameters) and the precise form of the state constraints enforced by the LRG.
- [Simulation Results] Simulation figures would benefit from tabulated numerical values of the adaptation gain, LRG prediction horizon, and uncertainty bounds so that the reported performance difference can be reproduced.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive comments. The points raised regarding the handling of time-varying parameter estimates in the stability proofs are valid and will be addressed through targeted revisions to the analysis and theorem statements.
read point-by-point responses
-
Referee: [Stability Analysis] Stability Analysis section (likely containing the main theorem on closed-loop invariance): The standard LRG construction ensures V̇ ≤ 0 inside the constraint-admissible set only for frozen parameters. Adaptation introduces time-varying estimates whose derivatives appear in the closed-loop vector field; the manuscript must explicitly bound these extra terms (e.g., via a composite Lyapunov function, slow-adaptation assumption, or redesign of the admissible set) to preserve the non-positivity of V̇ and the invariance of the safe set. Without this step the safety guarantee does not transfer to the combined dynamics.
Authors: We agree that the existing analysis relies on the frozen-parameter LRG property and does not yet explicitly account for the adaptation-induced terms in the closed-loop dynamics. In the revised manuscript we will introduce a composite Lyapunov function V(x,tilde theta) that augments the original quadratic form with a quadratic term in the parameter error. Using the standard adaptation law and the fact that the reference governor output remains bounded, we will derive an explicit upper bound on the cross terms involving dot hat theta and show that V̇ remains non-positive inside the admissible set (or under a mild slow-adaptation condition that we will state). The admissible-set definition will be left unchanged, but the invariance argument will be updated accordingly. revision: yes
-
Referee: [Theorem on combined stability and safety] Theorem on combined stability and safety (or equivalent result): The claim that adaptation plus LRG “guarantees stability … and remains safe” is load-bearing for the paper’s contribution. The proof must be expanded to show that the reference governor’s constraint-admissible set remains positively invariant under the augmented dynamics that include the adaptation law; otherwise the central safety assertion rests on the frozen-parameter case only.
Authors: We concur that the current theorem statement and proof are stated for the nominal LRG and must be extended to the augmented system. The revised version will reformulate the theorem for the closed-loop vector field that includes both the plant, the adaptation law, and the reference governor dynamics. Positive invariance of the constraint-admissible set will be shown by verifying that the Lie derivative of the barrier function (or the boundary condition) remains non-positive when the augmented state reaches the boundary, using the same composite Lyapunov function introduced in the stability section. This will make the safety guarantee rigorous for the combined architecture. revision: yes
Circularity Check
No circularity; derivation relies on standard Lyapunov theory and reference governor constructions
full rationale
The paper integrates adaptation with Lyapunov-based Reference Governors for first-order uncertain plants, claiming stability and constraint satisfaction via established Lyapunov analysis plus simulations. No quoted equations reduce a prediction or guarantee to a fitted parameter by construction, no self-citation chain is load-bearing for the central result, and no ansatz or uniqueness theorem is smuggled in from prior author work. The approach is presented as building on external Lyapunov and reference governor literature without self-referential definitions or renaming of known results. This is the normal case of a self-contained control-theoretic derivation.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The system can be modeled as first-order with parametric uncertainties
- domain assumption A Lyapunov-based reference governor exists that enforces state constraints while preserving stability
Reference graph
Works this paper leans on
-
[1]
Heat management in a portable high temperature pem fuel cell module with open cathode,
T. Kurz and J. Keller, “Heat management in a portable high temperature pem fuel cell module with open cathode,”Fuel Cells, pp. 518–525, 2011
work page 2011
-
[2]
An analytical, control-oriented state space model for a pem fuel cell system,
F. Grasser, “An analytical, control-oriented state space model for a pem fuel cell system,” Ph.D. dissertation, EPFL, Lausanne, 2006.doi:10.5075/epfl-thesis-3445
-
[3]
J. Han, S. Yu, and S. Yi, “Advanced thermal management of automotive fuel cells using a model reference adaptive control algorithm,”International Journal of Hydrogen Energy, pp. 4328–4341, 2017
work page 2017
-
[4]
Adaptive control of a nonlinear fuel cell-gas turbine balance of plant simulation facility,
A. Tsai, D. Tucker, and T. Emami, “Adaptive control of a nonlinear fuel cell-gas turbine balance of plant simulation facility,”Journal of Fuel Cell Science and Technology, p. 061 002, Sep. 2014
work page 2014
-
[5]
Modeling and constraint-aware control of pressure dynamics in water electrolysis systems,
M. Ayubirad, M. Akbar, and H. R. Ossareh, “Modeling and constraint-aware control of pressure dynamics in water electrolysis systems,”IF AC-PapersOnLine, pp. 982–987, 2025
work page 2025
-
[6]
P. Zhao, I. Kolmanovsky, and N. Hovakimyan, “Integrated adaptive control and reference governors for constrained systems with state-dependent uncertainties,”IEEE Transactions on Automatic Control, pp. 3158–3173, 2024
work page 2024
-
[7]
Adaptive control strategies for a precision machine tools axis,
M. Smith, A. Annaswamy, and A. Slocum, “Adaptive control strategies for a precision machine tools axis,”Precision Engineering, pp. 192–206, 1995
work page 1995
-
[8]
K. S. Narendra and A. M. Annaswamy,Stable adaptive systems. USA: Prentice-Hall, Inc., 1989
work page 1989
-
[9]
E. Gilbert and I. Kolmanovsky, “Nonlinear tracking control in the presence of state and control constraints: A generalized reference governor,”Automatica, vol. 38, no. 12, pp. 2063–2073, 2002
work page 2063
-
[10]
E. Gilbert and I. Kolmanovsky, “Set-point control of nonlinear systems with state and control constraints: A lyapunov-function, reference-governor approach,” inProceedings of the 38th IEEE Conference on Decision and Control, 1999, pp. 2507–2512
work page 1999
-
[11]
Reference and command governors for systems with constraints: A survey on theory and applications,
E. Garone, S. Di Cairano, and I. Kolmanovsky, “Reference and command governors for systems with constraints: A survey on theory and applications,”Automatica, pp. 306–328, 2017
work page 2017
-
[12]
Characterization of a ballard mk5-e proton exchange membrane fuel cell stack,
F. Laurencelle et al., “Characterization of a ballard mk5-e proton exchange membrane fuel cell stack,” Fuel cells, pp. 66–71, 2001. 12
work page 2001
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.