Estimation of Unknown Parameters in Presence of Perturbations and Noises with Application to GPEBO Design
Pith reviewed 2026-05-09 21:02 UTC · model grok-4.3
The pith
Three new estimation laws ensure exponential convergence of parametric errors to a small neighborhood even when more than half the regressors are independent of additive perturbations.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Based on a novel perturbation annihilation procedure, three new estimation laws are proposed for linear regression equations with additive perturbations. These laws ensure exponential convergence of the parametric error to an arbitrarily small neighborhood of zero, even in cases where more than half but not all regressor elements are independent from the perturbation. One law is applied to enhance the GPEBO for nonlinear affine systems with noisy measured outputs.
What carries the argument
The novel perturbation annihilation procedure that generates a new regression equation without the additive perturbation by using the partial independence of regressor elements.
Load-bearing premise
It is possible to construct and apply a perturbation annihilation procedure that does not require all regressor elements to be independent of the additive perturbation.
What would settle it
An experiment or simulation with a linear regression where fewer than half the regressors are independent of the perturbation, checking if the parametric error still converges exponentially to a small neighborhood.
Figures

read the original abstract
A problem of online estimation of unknown parameters is considered for a linear regression equation, which is affected by an additive perturbation that can be caused by measurement noise (that corrupts regressor and regressand), as well as external perturbations. Known approaches to solve this problem typically have one of the following disadvantages: 1) they ensure convergence of a parametric error to a compact set with non-adjustable bound, 2) independence of all system regressor elements from the perturbation/noise is required to annihilate them, 3) an instrumental variable is needed to be selected. On the basis of the novel perturbation annihilation procedure, in the present paper, we propose three new estimation laws, which are free from the above-mentioned drawbacks and ensure exponential convergence of the parametric error to an arbitrarily small neighborhood of zero, particularly, in case more than a half (not all) of the regressor elements are independent from additive perturbation. One of the proposed estimation laws is used for the design of Generalized Parameter Estimation-Based Observer (GPEBO) for nonlinear affine systems to enhance GPEBO performance in case when the measured system output is corrupted by noise. The theoretical results are supported by examples and mathematical modelling.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper considers online parameter estimation for a linear regression equation subject to additive perturbations (from noise or external sources) that corrupt both regressor and regressand. Existing methods suffer from non-tunable residual sets, requirement that all regressor elements be independent of the perturbation, or need for instrumental variables. The authors introduce a novel perturbation annihilation procedure and three new estimation laws that achieve exponential convergence of the parametric error to an arbitrarily small tunable neighborhood of zero, even when more than half (but not necessarily all) of the regressor elements are independent of the perturbation. One law is applied to design an improved Generalized Parameter Estimation-Based Observer (GPEBO) for nonlinear affine systems with noisy outputs. Claims are illustrated via examples and simulations.
Significance. If the annihilation procedure and associated stability proofs hold, the work would meaningfully relax a common conservatism in robust adaptive estimation, enabling practical application in partially noisy environments without requiring full regressor cleanliness or external instruments. The GPEBO extension shows direct relevance to nonlinear observer design. Multiple estimation laws provide design flexibility. The result would be stronger if accompanied by explicit, verifiable conditions ensuring the post-annihilation regressor retains sufficient persistency of excitation.
major comments (3)
- [§3.2] §3.2 (Annihilation procedure): the construction of the operator that annihilates perturbations using only a majority-clean subset is presented without an explicit rank or minimum-eigenvalue condition on the selected sub-regressor; this is load-bearing because the exponential convergence rate and residual size in the subsequent theorems depend on the Gramian of the effective regressor after annihilation.
- [Theorem 1] Theorem 1 (main convergence result): the proof that the closed-loop parametric error converges exponentially to a tunable ball assumes the annihilated regressor satisfies a persistency-of-excitation condition strong enough to dominate residual perturbation terms, yet no verification is given that this holds when the clean subset is only marginally larger than half the dimension and may itself be only weakly exciting.
- [§4.3] §4.3 (GPEBO application): the observer error dynamics inherit the same annihilation step; the claim of improved performance under output noise therefore rests on the same unverified PE preservation property, which must be shown to not introduce additional time-variation that degrades the original GPEBO convergence.
minor comments (3)
- [Abstract / Notation] The abstract states 'more than a half (not all)' but the precise selection rule and how ties or exactly 50 % are handled are not stated in the notation or algorithm boxes.
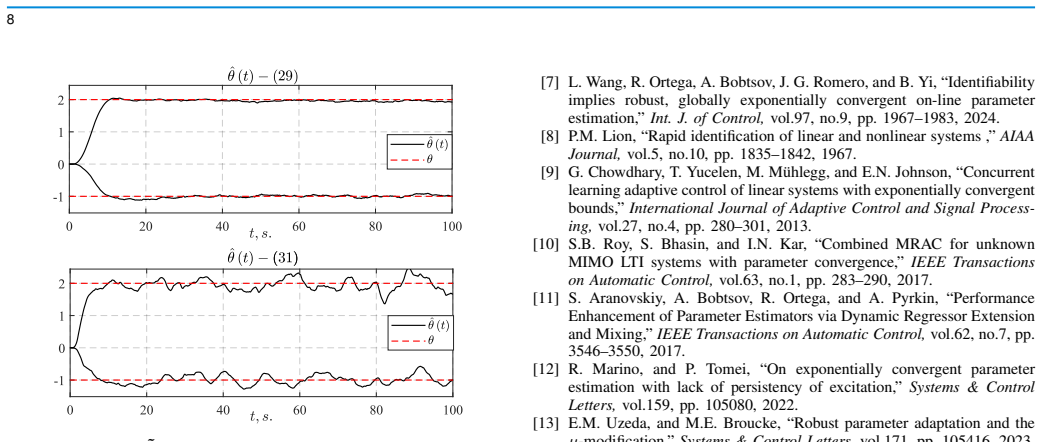
- [Figures 2 and 4] Figure 2 and Figure 4 lack axis labels, units, and legends distinguishing the three proposed laws from the baseline methods.
- [§2.1] A few sentences in §2.1 repeat the drawbacks listed in the abstract without adding new technical detail.
Simulated Author's Rebuttal
We thank the referee for the constructive and insightful comments, which identify key points where additional rigor and clarification will strengthen the manuscript. We address each major comment point-by-point below and commit to revisions that incorporate explicit conditions and analysis as suggested.
read point-by-point responses
-
Referee: [§3.2] §3.2 (Annihilation procedure): the construction of the operator that annihilates perturbations using only a majority-clean subset is presented without an explicit rank or minimum-eigenvalue condition on the selected sub-regressor; this is load-bearing because the exponential convergence rate and residual size in the subsequent theorems depend on the Gramian of the effective regressor after annihilation.
Authors: We agree that an explicit condition on the selected sub-regressor is required for the results to hold rigorously. In the revised manuscript we will add a new assumption (Assumption 3) stating that the Gramian formed by the clean sub-regressor satisfies a uniform lower bound on its minimum eigenvalue. This condition will be used to obtain explicit expressions for the convergence rate and the radius of the residual set in Theorems 1–3, and a short paragraph will be added explaining how the condition can be checked in applications. revision: yes
-
Referee: [Theorem 1] Theorem 1 (main convergence result): the proof that the closed-loop parametric error converges exponentially to a tunable ball assumes the annihilated regressor satisfies a persistency-of-excitation condition strong enough to dominate residual perturbation terms, yet no verification is given that this holds when the clean subset is only marginally larger than half the dimension and may itself be only weakly exciting.
Authors: The proof of Theorem 1 relies on the annihilated regressor being persistently exciting. Because the annihilation operator is constructed to retain the clean components, PE of the clean sub-regressor implies PE of the post-annihilation regressor (with possibly reduced excitation level). To address the marginal case explicitly, we will insert a remark after Theorem 1 that supplies sufficient conditions on the PE parameters of the sub-regressor guaranteeing that the residual perturbation terms are dominated. We will also add a numerical illustration with a clean subset of dimension n/2 + 1. revision: yes
-
Referee: [§4.3] §4.3 (GPEBO application): the observer error dynamics inherit the same annihilation step; the claim of improved performance under output noise therefore rests on the same unverified PE preservation property, which must be shown to not introduce additional time-variation that degrades the original GPEBO convergence.
Authors: We recognize that the time-varying annihilation operator may affect the convergence rate of the GPEBO error dynamics. In the revised Section 4.3 we will augment the stability analysis to show that, under the PE condition introduced for the annihilated regressor, the combined observer error still converges exponentially to a tunable neighborhood. An explicit bound accounting for the additional time variation will be derived, and the simulation example will be updated to compare noisy and noise-free cases. revision: yes
Circularity Check
No significant circularity in derivation chain
full rationale
The paper introduces a novel perturbation annihilation procedure as the basis for three new estimation laws. The exponential convergence claim follows from analysis of the resulting closed-loop error dynamics under the stated condition on the regressor subset, rather than being defined in terms of the outputs or fitted parameters. No load-bearing self-citation establishes the core procedure or stability result; the GPEBO application is presented as an extension using one of the new laws. The derivation is self-contained with independent mathematical steps, supported by examples, and does not reduce any prediction to its inputs by construction.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption A perturbation annihilation operator can be designed for the linear regression equation such that the resulting filtered signals satisfy the required independence properties for stability.
Reference graph
Works this paper leans on
-
[1]
Adaptive observers with exponential rate of conver- gence,
G. Kreisselmeier, “Adaptive observers with exponential rate of conver- gence,”IEEE Trans. on Automatic Control,vol.22, no.1, pp. 2–8, 1977
work page 1977
-
[2]
G. Kreisselmeier, “On adaptive state regulation,”IEEE Transactions on Automatic Control,vol.27, no.1, pp. 3–17, 1982
work page 1982
-
[3]
R. Ortega, A. Bobtsov, N. Nikolaev, J. Schiffer, and D. Dochain, “Gen- eralized parameter estimation-based observers: Application to power systems and chemical-biological reactors,”Automatica,vol.129, pp. 109635, 2021
work page 2021
-
[4]
L. Wang, R. Ortega, and A. Bobtsov, “Observability is sufficient for the design of globally exponentially stable state observers for state-affine nonlinear systems,”Automatica,vol.149, pp. 110838, 2023
work page 2023
-
[5]
Online actor–critic algorithm to solve the continuous-time infinite horizon optimal control problem,
K.G. Vamvoudakis, and F. L. Lewis, “Online actor–critic algorithm to solve the continuous-time infinite horizon optimal control problem,” Automatica,vol.46, pp. 878–888, 2010
work page 2010
-
[6]
Composite learning robot control with guaranteed parameter convergence,
Y . Pan, and H. Yu, “Composite learning robot control with guaranteed parameter convergence,”Automatica,vol.89, pp. 398–406, 2018
work page 2018
-
[7]
Identifiability implies robust, globally exponentially convergent on-line parameter estimation,
L. Wang, R. Ortega, A. Bobtsov, J. G. Romero, and B. Yi, “Identifiability implies robust, globally exponentially convergent on-line parameter estimation,”Int. J. of Control,vol.97, no.9, pp. 1967–1983, 2024
work page 1967
-
[8]
Rapid identification of linear and nonlinear systems ,
P.M. Lion, “Rapid identification of linear and nonlinear systems ,”AIAA Journal,vol.5, no.10, pp. 1835–1842, 1967
work page 1967
-
[9]
Concurrent learning adaptive control of linear systems with exponentially convergent bounds,
G. Chowdhary, T. Yucelen, M. M ¨uhlegg, and E.N. Johnson, “Concurrent learning adaptive control of linear systems with exponentially convergent bounds,”International Journal of Adaptive Control and Signal Process- ing,vol.27, no.4, pp. 280–301, 2013
work page 2013
-
[10]
Combined MRAC for unknown MIMO LTI systems with parameter convergence,
S.B. Roy, S. Bhasin, and I.N. Kar, “Combined MRAC for unknown MIMO LTI systems with parameter convergence,”IEEE Transactions on Automatic Control,vol.63, no.1, pp. 283–290, 2017
work page 2017
-
[11]
Performance Enhancement of Parameter Estimators via Dynamic Regressor Extension and Mixing,
S. Aranovskiy, A. Bobtsov, R. Ortega, and A. Pyrkin, “Performance Enhancement of Parameter Estimators via Dynamic Regressor Extension and Mixing,”IEEE Transactions on Automatic Control,vol.62, no.7, pp. 3546–3550, 2017
work page 2017
-
[12]
On exponentially convergent parameter estimation with lack of persistency of excitation,
R. Marino, and P. Tomei, “On exponentially convergent parameter estimation with lack of persistency of excitation,”Systems & Control Letters,vol.159, pp. 105080, 2022
work page 2022
-
[13]
Robust parameter adaptation and the µ-modification,
E.M. Uzeda, and M.E. Broucke, “Robust parameter adaptation and the µ-modification,”Systems & Control Letters,vol.171, pp. 105416, 2023
work page 2023
-
[14]
A class of high order tuners for adaptive systems,
J. E. Gaudio, A. M. Annaswamy, M. A. Bolender, E. Lavretsky, and T. E. Gibson, “A class of high order tuners for adaptive systems,”IEEE Control Systems Letters,vol.5, no.2, pp. 391–396, 2020
work page 2020
-
[15]
R. Ortega, V . Nikiforov, and D. Gerasimov, “On modified parameter estimators for identification and adaptive control. A unified framework and some new schemes,”Annual Reviews in Control,vol.50, pp. 278– 293, 2020
work page 2020
-
[16]
Composite adaptation and learning for robot control: A survey,
K. Guo, and Y . Pan, “Composite adaptation and learning for robot control: A survey,”Ann. Reviews in Control,vol.55, pp. 279–290, 2023
work page 2023
-
[17]
Comparative analysis of parameter convergence for several least-squares estimation schemes,
Y . Pan, T. Shi, and R. Ortega, “Comparative analysis of parameter convergence for several least-squares estimation schemes,”IEEE Trans- actions on Automatic Control,vol.69, no.5, pp. 3341–3348, 2023
work page 2023
-
[18]
Robust adaptive finite-time parameter estimation and control for robotic sys- tems,
J. Na, M. N. Mahyuddin, G. Herrmann, X. Ren, and P. Barber, “Robust adaptive finite-time parameter estimation and control for robotic sys- tems,”International Journal of Robust and Nonlinear Control,vol.25, no.16, pp. 3045–3071, 2015
work page 2015
-
[19]
Optimal adaptive parameter estimation with online varying learning gain,
S. Chen, J. Na, Y . Huang, Y . Xing, J. Zhao, and P. K. Wong, “Optimal adaptive parameter estimation with online varying learning gain,”IEEE Transactions on Automatic Control,vol.70, no.5, pp. 3518–3525, 2025
work page 2025
-
[20]
Estimation of regression parameters with arbitrary noise,
A. V . Goldenshluger, and B. T. Polyak, “Estimation of regression parameters with arbitrary noise,”Mathematical Methods of Statistics, vol.2, no.1, pp. 18–29, 1993
work page 1993
-
[21]
Linear regression and filtering under nonstandard as- sumptions (Arbitrary noise),
O. Granichin, “Linear regression and filtering under nonstandard as- sumptions (Arbitrary noise),”IEEE Transactions on Automatic Control, vol.49, no.10, pp. 1830–1837, 2004
work page 2004
-
[22]
Power noise filtration in DREM,
A. Bobtsov, S. Aranovskiy, D. Efimov, A. Pyrkin, V . V orobev, and J. Wang, “Power noise filtration in DREM,”Proceedings of 2024 European Control Conference (ECC),pp. 2259–2264, 2024
work page 2024
-
[23]
A. Glushchenko, and K. Lastochkin, “Exact asymptotic estimation of unknown parameters of perturbed LRE with application to state observation,”Proceedings of 32nd Mediterranean Conference on Control and Automation (MED),pp. 137–142, 2024
work page 2024
-
[24]
Instrumental variables based DREM for online asymptotic identification of perturbed linear systems,
A. Glushchenko, and K. Lastochkin, “Instrumental variables based DREM for online asymptotic identification of perturbed linear systems,” IEEE Trans. on Automatic Control,vol.70, no.2, pp. 1320–1327, 2025
work page 2025
-
[25]
Comparison of online exact esti- mators for LRE with perturbation,
A. Glushchenko, and K. Lastochkin, “Comparison of online exact esti- mators for LRE with perturbation,”IFAC-PapersOnLine,vol.59, no.14, pp. 86-91, 2025
work page 2025
-
[26]
Unbiased parameter estimation via DREM with annihilators,
A. Glushchenko, and K. Lastochkin, “Unbiased parameter estimation via DREM with annihilators,”IFAC-PapersOnLine,vol.59, no.14, pp. 92-97, 2025
work page 2025
-
[27]
Adaptive reconstruction of nonlin- ear systems states via DREM with perturbation annihilation,
A. Glushchenko, and K. Lastochkin, “Adaptive reconstruction of nonlin- ear systems states via DREM with perturbation annihilation,”Proceed- ings of 23rd European Control Conference,pp. 1987-1992, 2025
work page 1987
-
[28]
Necessary and sufficient conditions for parameter convergence in adaptive control,
S. Boyd, and S. S. Sastry, “Necessary and sufficient conditions for parameter convergence in adaptive control,”Automatica,vol.22, no. 6, pp. 629–639, 1986
work page 1986
-
[29]
R. Ortega, A. Bobtsov, J. G. Romero, and L. Fang, “Immersion of a class of nonlinear systems into state-affine ones for the design of generalized parameter estimation-based observers: A simple algebraic procedure,” Asian Journal of Control,pp. 1–12, 2026. Early Access
work page 2026
-
[30]
A. Glushchenko, and K. Lastochkin, “Supplement to “Estimation of Unknown Parameters in Presence of Perturbations and Noises with Application to GPEBO Design”,” arXiv preprint arXiv:2604.21384. pp.1–9, 2026. https://arxiv.org/src/2604.21384v2/anc/supp.pdf
work page internal anchor Pith review Pith/arXiv arXiv 2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.