Recognition: unknown
Energy-Efficient Multi-Robot Coverage Path Planning of Non-Convex Regions of Interests
Pith reviewed 2026-05-08 11:34 UTC · model grok-4.3
The pith
The MRCPP framework reduces energy consumption by 3 to 40 percent and computation time by an order of magnitude for teams of robots covering non-convex regions with obstacles.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
MRCPP achieves lower total energy use and faster planning for multi-robot coverage of non-convex ROIs by generating globally-informed swaths, producing parallel sweeping paths with minimal turns, inserting safety buffers for turning clearance, solving an mTSP instance to distribute workload evenly, and connecting disjoint segments through a modified visibility graph that preserves heading angles and stays inside safe regions.
What carries the argument
The five-step pipeline consisting of globally-informed swath generation, minimal-turn parallel sweeping, safety buffer calculation, mTSP workload balancing, and heading-aware visibility graph connections.
Where Pith is reading between the lines
- The same pipeline could be adapted for coverage tasks performed by ground robots moving through cluttered indoor or urban spaces.
- Reduced energy draw per mission could allow smaller batteries or longer operating times before recharging in field operations.
- Testing the planner against environments where obstacles move would reveal whether the static safety buffers remain sufficient.
- Releasing the code as open source lets other groups apply the method to new robot platforms and compare results directly.
Load-bearing premise
The specific mix of globally-informed swath generation, minimal-turn sweeping, safety buffers, mTSP balancing, and heading-aware connections will deliver the reported energy and time savings without hidden increases in path length or safety violations under varied real conditions.
What would settle it
Deploy the planner on a fresh non-convex ROI containing obstacles and no-fly zones, then measure that the robots' actual energy consumption or planning computation time shows no improvement over a standard boustrophedon-based method.
Figures




read the original abstract
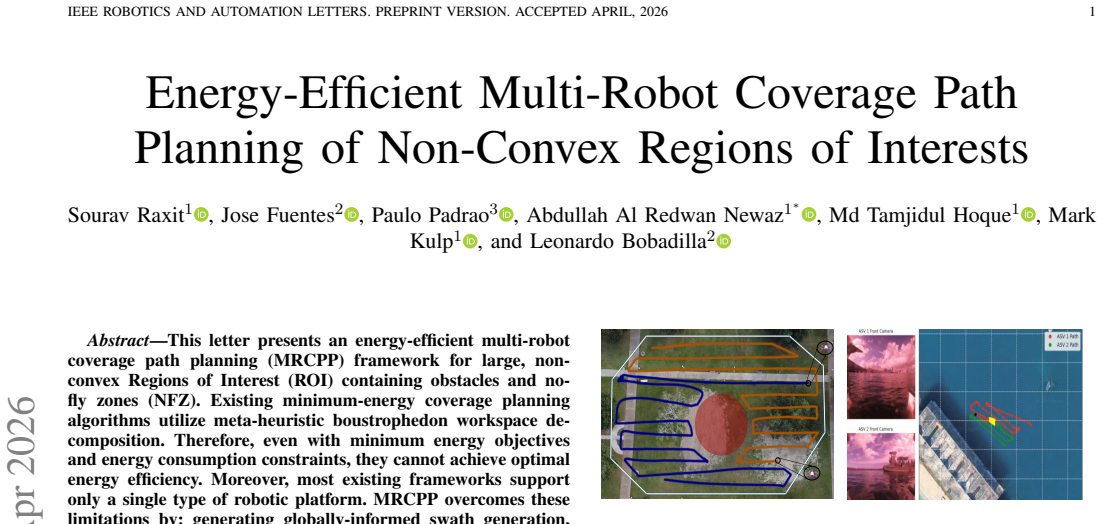
This letter presents an energy-efficient multi-robot coverage path planning (MRCPP) framework for large, nonconvex Regions of Interest (ROI) containing obstacles and no-fly zones (NFZ). Existing minimum-energy coverage planning algorithms utilize meta-heuristic boustrophedon workspace decomposition. Therefore, even with minimum energy objectives and energy consumption constraints, they cannot achieve optimal energy efficiency. Moreover, most existing frameworks support only a single type of robotic platform. MRCPP overcomes these limitations by: generating globally-informed swath generation, creating parallel sweeping paths with minimal turns, calculating safety buffers to ensure safe turning clearance, using an efficient mTSP solver to balance workloads and minimize mission time, and connecting disjoint segments via a modified visibility graph that tracks heading angles while maintaining transitions within safe regions. The efficacy of the proposed MRCPP framework is demonstrated through real-world experiments involving autonomous aerial vehicles (AAVs) and autonomous surface vehicles (ASVs). Evaluations demonstrate that the proposed MRCPP consistently outperforms state-of-the-art planners, reducing average total energy consumption by 3\% to 40\% for a team of 3 robots and computation time by an order of magnitude, while maintaining balanced workload distribution and strong scalability across increasing fleet sizes. The MRCPP framework is released as an open-source package and videos of real-world and simulated experiments are available at https://mrc-pp.github.io.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes the MRCPP framework for energy-efficient multi-robot coverage path planning (CPP) in large non-convex regions of interest (ROIs) containing obstacles and no-fly zones (NFZs). It combines globally-informed swath generation, parallel sweeping with minimal turns, safety buffers for turning clearance, an mTSP solver for workload balancing, and a modified heading-aware visibility graph for connecting segments. The framework is evaluated in real-world experiments with autonomous aerial vehicles (AAVs) and autonomous surface vehicles (ASVs), claiming consistent outperformance over state-of-the-art planners with 3-40% lower average total energy consumption for teams of 3 robots, an order-of-magnitude reduction in computation time, balanced workload, and good scalability with fleet size. The code is released as open-source.
Significance. If the energy savings and computational gains hold under consistent modeling and fair baselines, the work would offer a practical advance for multi-robot coverage in complex environments, with direct relevance to applications such as environmental monitoring or search. The combination of geometric decomposition with optimization-based balancing and the real-world validation on two distinct platforms (AAV/ASV) are strengths; the open-source release further increases potential impact.
major comments (3)
- [Methodology (swath generation and path connection subsections)] The energy consumption model is never stated as an equation or explicit function anywhere in the method description. Without a precise definition (e.g., whether it includes only path length, turning-radius costs, acceleration profiles for AAVs, or hydrodynamic drag for ASVs), it is impossible to verify that the reported 3-40% energy reduction is produced by the algorithmic choices rather than by differences in how energy is scored for MRCPP versus the re-implemented baselines.
- [Experiments and Results] The experimental section provides no description of how the state-of-the-art baselines were re-implemented under identical constraints (non-convex ROI boundaries, obstacle polygons, and NFZ polygons). If the baselines were allowed simpler convex decompositions or different safety margins, the claimed energy and runtime advantages cannot be attributed solely to the proposed pipeline of globally-informed swaths + mTSP + heading-aware visibility graph.
- [Experiments and Results] No statistical analysis (standard deviations, number of trials, or significance tests) accompanies the energy and time figures. The abstract states “average total energy consumption” reductions without reporting variance or the exact number of independent runs, which is required to support the central performance claim.
minor comments (3)
- [Abstract] The abstract lists five algorithmic components but does not name the specific SOTA planners used for comparison; adding the names (e.g., “compared against Boustrophedon decomposition of X et al. and Y et al.”) would improve clarity.
- [Figures] Figure captions for the real-world AAV and ASV trajectories should explicitly state the ROI area, number of obstacles/NFZs, and the exact energy model used to color the paths.
- [Workload balancing subsection] The mTSP formulation is referenced but the objective function (minimize makespan or total distance?) and the solver implementation details are omitted; a short paragraph or pseudocode would help reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback on our MRCPP framework. We address each major comment point by point below, providing clarifications and committing to revisions that improve the manuscript's transparency, reproducibility, and statistical rigor without altering the core contributions.
read point-by-point responses
-
Referee: [Methodology (swath generation and path connection subsections)] The energy consumption model is never stated as an equation or explicit function anywhere in the method description. Without a precise definition (e.g., whether it includes only path length, turning-radius costs, acceleration profiles for AAVs, or hydrodynamic drag for ASVs), it is impossible to verify that the reported 3-40% energy reduction is produced by the algorithmic choices rather than by differences in how energy is scored for MRCPP versus the re-implemented baselines.
Authors: We agree that an explicit equation would strengthen verifiability. The energy model components (path length, minimum-turning-radius penalties for AAVs, and hydrodynamic drag terms for ASVs) are described in the experimental setup and applied uniformly, but were not formalized as a single equation in the methodology. In the revised manuscript we will add a dedicated equation in the method section defining the total energy function E(·) with all terms, platform-specific parameters, and confirmation that the identical model is used for MRCPP and all baselines. revision: yes
-
Referee: [Experiments and Results] The experimental section provides no description of how the state-of-the-art baselines were re-implemented under identical constraints (non-convex ROI boundaries, obstacle polygons, and NFZ polygons). If the baselines were allowed simpler convex decompositions or different safety margins, the claimed energy and runtime advantages cannot be attributed solely to the proposed pipeline of globally-informed swaths + mTSP + heading-aware visibility graph.
Authors: We acknowledge the need for explicit implementation details to support fair comparison. The baselines were adapted to the same non-convex polygon inputs, obstacle/NFZ representations, and safety-buffer rules as MRCPP. To address the gap, the revised experimental section will include a dedicated paragraph (and possibly a table) describing the precise modifications made to each baseline so that all methods operate under identical environmental constraints. revision: yes
-
Referee: [Experiments and Results] No statistical analysis (standard deviations, number of trials, or significance tests) accompanies the energy and time figures. The abstract states “average total energy consumption” reductions without reporting variance or the exact number of independent runs, which is required to support the central performance claim.
Authors: This is a fair observation on statistical reporting. The reported averages derive from repeated trials, but variance, trial counts, and significance tests were omitted. In the revision we will augment all energy and runtime tables/figures with standard deviations, state the exact number of independent runs (simulation and real-world), and add appropriate statistical tests to substantiate the performance claims. revision: yes
Circularity Check
No significant circularity; claims rest on empirical comparisons to external SOTA baselines
full rationale
The paper introduces an algorithmic MRCPP framework via a pipeline of swath generation, minimal-turn sweeping, safety buffers, mTSP balancing, and heading-aware visibility graphs. Performance is evaluated through real-world AAV/ASV experiments showing 3-40% energy reduction and faster computation versus state-of-the-art planners. No equations, fitted parameters presented as predictions, or self-citation chains appear in the abstract or described method; the central claims are externally benchmarked rather than internally self-referential. The derivation chain is self-contained against external comparisons.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The environment map with obstacles and no-fly zones is known a priori
- domain assumption Robots have standard kinematic models allowing for turning with safety buffers
Reference graph
Works this paper leans on
-
[1]
Autonomous and cooperative design of the monitor positions for a team of uavs to maximize the quantity and quality of detected objects,
D. I. Koutras, A. C. Kapoutsis, and E. B. Kosmatopoulos, “Autonomous and cooperative design of the monitor positions for a team of uavs to maximize the quantity and quality of detected objects,”IEEE Robotics and Automation Letters, pp. 4986–4993, 2020
2020
-
[2]
A distributed, plug-n-play algorithm for multi-robot applications with a priori non-computable objective functions,
A. C. Kapoutsis, S. A. Chatzichristofis, and E. B. Kosmatopoulos, “A distributed, plug-n-play algorithm for multi-robot applications with a priori non-computable objective functions,”The International Journal of Robotics Research, pp. 813–832, 2019
2019
-
[3]
Unmanned aerial vehicles (uavs): A survey on civil applications and key research challenges,
H. Shakhatreh, A. H. Sawalmeh, A. Al-Fuqaha, Z. Dou, E. Almaita, I. Khalil, N. S. Othman, A. Khreishah, and M. Guizani, “Unmanned aerial vehicles (uavs): A survey on civil applications and key research challenges,”IEEE access, pp. 48 572–48 634, 2019
2019
-
[4]
An experimental uav system for search and rescue challenge,
D. Erdos, A. Erdos, and S. E. Watkins, “An experimental uav system for search and rescue challenge,”IEEE Aerospace and Electronic Systems Magazine, pp. 32–37, 2013
2013
-
[5]
Energy-aware multi- uav coverage mission planning with optimal speed of flight,
D. Datsko, F. Nekovar, R. Penicka, and M. Saska, “Energy-aware multi- uav coverage mission planning with optimal speed of flight,”IEEE Robotics and Automation Letters, pp. 2893–2900, 2024
2024
-
[6]
Fields2cover: An open-source coverage path planning library for unmanned agricultural vehicles,
G. Mier, J. Valente, and S. de Bruin, “Fields2cover: An open-source coverage path planning library for unmanned agricultural vehicles,” IEEE Robotics and Automation Letters, pp. 2166–2172, 2023
2023
-
[7]
Cooperative multi-uav coverage mission planning platform for remote sensing applications,
S. Apostolidis, P. Kapoutsis, A. Kapoutsis, and E. Kosmatopoulos, “Cooperative multi-uav coverage mission planning platform for remote sensing applications,”Autonomous Robots, pp. 373–400, 2022
2022
-
[8]
Large scale aerial multi-robot coverage path planning,
K. Shah, A. E. Schmidt, G. Ballard, and M. Schwager, “Large scale aerial multi-robot coverage path planning,”Field Robotics, pp. 1971– 1998, 2022
1971
-
[9]
Coverage of known spaces: The boustrophedon cellular decomposition,
H. Choset, “Coverage of known spaces: The boustrophedon cellular decomposition,”Autonomous Robots, pp. 247–253, 2000
2000
-
[10]
Revisiting boustrophedon coverage path planning as a generalized traveling salesman problem,
R. B ¨ahnemann, N. Lawrance, J. J. Chung, M. Pantic, R. Siegwart, and J. Nieto, “Revisiting boustrophedon coverage path planning as a generalized traveling salesman problem,” inField and Service Robotics, 2021, pp. 277–290
2021
-
[11]
A survey on coverage path planning for robotics,
E. Galceran and M. Carreras, “A survey on coverage path planning for robotics,”Robotics and Autonomous systems, pp. 1258–1276, 2013
2013
-
[12]
Darp: Divide areas algorithm for optimal multi-robot coverage path planning,
A. C. Kapoutsis, S. A. Chatzichristofis, and E. B. Kosmatopoulos, “Darp: Divide areas algorithm for optimal multi-robot coverage path planning,” Journal of Intelligent & Robotic Systems, pp. 663–680, 2017
2017
-
[13]
The symmetric generalized traveling salesman polytope,
M. Fischetti, J. J. S. Gonz ´alez, and P. Toth, “The symmetric generalized traveling salesman polytope,”Networks, pp. 113–123, 1995
1995
-
[14]
Solving geometric problems with the rotating calipers,
G. T. Toussaint, “Solving geometric problems with the rotating calipers,” inProc. IEEE Melecon, 1983, p. A10
1983
-
[15]
An extension of the lin-kernighan-helsgaun tsp solver for constrained traveling salesman and vehicle routing problems,
K. Helsgaun, “An extension of the lin-kernighan-helsgaun tsp solver for constrained traveling salesman and vehicle routing problems,”Roskilde: Roskilde University, pp. 966–980, 2017
2017
-
[16]
S. M. LaValle,Planning algorithms. Cambridge university press, 2006
2006
-
[17]
Coverage path planning: The boustrophedon cellular decomposition,
H. Choset and P. Pignon, “Coverage path planning: The boustrophedon cellular decomposition,” inField and service robotics. Springer, 1998, pp. 203–209
1998
-
[18]
Coverage path planning for uavs photogrammetry with energy and resolution constraints,
C. Di Franco and G. Buttazzo, “Coverage path planning for uavs photogrammetry with energy and resolution constraints,”Journal of Intelligent & Robotic Systems, pp. 445–462, 2016
2016
-
[19]
Multidrone aerial surveys of penguin colonies in antarctica,
K. Shah, G. Ballard, A. Schmidt, and M. Schwager, “Multidrone aerial surveys of penguin colonies in antarctica,”Science Robotics, p. eabc3000, 2020
2020
-
[20]
Range, endurance, and optimal speed estimates for multicopters,
L. Bauersfeld and D. Scaramuzza, “Range, endurance, and optimal speed estimates for multicopters,”IEEE Robotics and Automation Letters, pp. 2953–2960, 2022
2022
-
[21]
Multi-tour set traveling salesman problem in planning power transmission line inspection,
F. Nekov ´aˇr, J. Faigl, and M. Saska, “Multi-tour set traveling salesman problem in planning power transmission line inspection,”IEEE Robotics and Automation Letters, pp. 6196–6203, 2021
2021
-
[22]
Turn-minimizing multirobot coverage,
I. Vandermeulen, R. Groß, and A. Kolling, “Turn-minimizing multirobot coverage,” in2019 International Conference on Robotics and Automa- tion (ICRA). IEEE, 2019, pp. 1014–1020
2019
-
[23]
Improving time and energy efficiency in multi-uav coverage oper- ations by optimizing the uavs’ initial positions,
A. Stefanopoulou, E. K. Raptis, S. D. Apostolidis, S. Gkelios, A. C. Kapoutsis, S. A. Chatzichristofis, S. Vrochidis, and E. B. Kosmatopou- los, “Improving time and energy efficiency in multi-uav coverage oper- ations by optimizing the uavs’ initial positions,”International Journal of Intelligent Robotics and Applications, pp. 629–647, 2024
2024
-
[24]
Aerial remote sensing in agriculture: A practical approach to area coverage and path planning for fleets of mini aerial robots,
A. Barrientos, J. Colorado, J. d. Cerro, A. Martinez, C. Rossi, D. Sanz, and J. Valente, “Aerial remote sensing in agriculture: A practical approach to area coverage and path planning for fleets of mini aerial robots,”Journal of Field Robotics, pp. 667–689, 2011
2011
-
[25]
A new global optimization strategy for coordinated multi-robot exploration: Development and comparative evaluation,
D. Puig, M. A. Garc ´ıa, and L. Wu, “A new global optimization strategy for coordinated multi-robot exploration: Development and comparative evaluation,”Robotics and Autonomous Systems, pp. 635–653, 2011
2011
-
[26]
V oronoi coverage of non-convex environments with a group of net- worked robots,
A. Breitenmoser, M. Schwager, J.-C. Metzger, R. Siegwart, and D. Rus, “V oronoi coverage of non-convex environments with a group of net- worked robots,” in2010 IEEE international conference on robotics and automation. IEEE, 2010, pp. 4982–4989
2010
-
[27]
A survey on multi-robot coverage path planning for model reconstruction and mapping,
R. Almadhoun, T. Taha, L. Seneviratne, and Y . Zweiri, “A survey on multi-robot coverage path planning for model reconstruction and mapping,”SN Applied Sciences, p. 847, 2019
2019
-
[28]
Multi-uav tasking and coordination for monitoring and coverage of agricultural farmland,
W. Gray II, A. A. R. Newaz, M. Khaleghi, H. T. Nguyen, L. H. Beni, A. Shahbazi, and A. Karimoddini, “Multi-uav tasking and coordination for monitoring and coverage of agricultural farmland,”Journal on Autonomous Transportation Systems, vol. 3, no. 1, pp. 1–22, 2025
2025
-
[29]
Constructing spanning trees for efficient multi-robot coverage,
N. Agmon, N. Hazon, and G. A. Kaminka, “Constructing spanning trees for efficient multi-robot coverage,” inProceedings 2006 IEEE International Conference on Robotics and Automation, 2006. ICRA 2006.IEEE, 2006, pp. 1698–1703
2006
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.