Move-Then-Operate: Behavioral Phasing for Human-Like Robotic Manipulation
Pith reviewed 2026-05-08 05:57 UTC · model grok-4.3
The pith
Decoupling robotic manipulation into distinct move and operate phases improves success rates and training efficiency.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By introducing an explicit separation between the move phase for coarse relocation and the operate phase for precise interactions, the Move-Then-Operate framework uses a dual-expert policy with a learnable selector to achieve an average success rate of 68.9 percent on manipulation tasks, outperforming monolithic baselines and models trained on substantially more data.
What carries the argument
A dual-expert policy architecture routed by a learnable phase selector, supported by automatically generated phase labels from an MLLM pipeline conditioned on end-effector velocity and subtask decomposition.
If this is right
- The method achieves 24% higher success than the monolithic baseline on RoboTwin2.
- It matches or exceeds performance of models trained on 10 times more data.
- Peak performance is reached in 40% fewer training steps.
- The structural inductive bias from phase disentanglement aids high-precision manipulation tasks.
Where Pith is reading between the lines
- This approach may generalize to other robot tasks involving distinct coarse and fine motor stages.
- Automatic phase labeling could lower the cost of preparing training data for complex behaviors.
- Testing the phase selector on real-world robots with varying speeds might reveal limits in the velocity-based labeling.
- The framework could inspire similar disentanglements in other AI domains like game playing or autonomous driving.
Load-bearing premise
The phase labels generated by the MLLM pipeline based on velocity and subtask cues accurately reflect human motor patterns and provide reliable training signals.
What would settle it
A controlled experiment showing no significant difference in success rates or training efficiency when using a single expert policy instead of the dual-expert setup with phase selector would indicate that the behavioral phasing is not the key factor.
Figures











read the original abstract
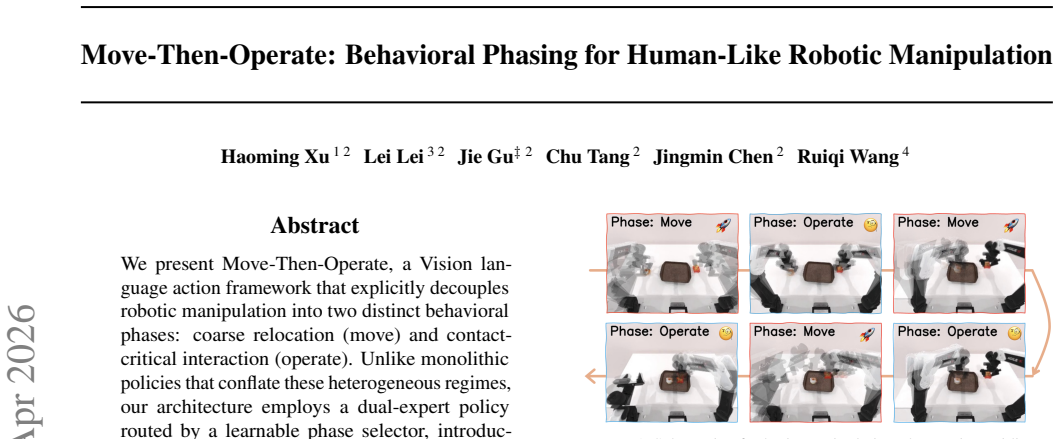
We present Move-Then-Operate, a Vision language action framework that explicitly decouples robotic manipulation into two distinct behavioral phases: coarse relocation (move) and contact-critical interaction (operate). Unlike monolithic policies that conflate these heterogeneous regimes, our architecture employs a dual-expert policy routed by a learnable phase selector, introducing a structural inductive bias that isolates phase-specific dynamics. Phase labels are automatically generated via an MLLM-based pipeline conditioned on lightweight contextual cues such as end-effector velocity and subtask decomposition to ensure alignment with human motor patterns. Evaluated on the RoboTwin2 benchmark, our method achieves an average success rate of $68.9\%$, outperforming the monolithic $\pi_0$ baseline by $24\%$. It matches or exceeds models trained on $10\times$ more data and reaches peak performance in $40\%$ fewer training steps, demonstrating that architectural disentanglement of move and operate phases is a highly effective and efficient strategy for mastering high-precision manipulation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces Move-Then-Operate, a vision-language-action framework for robotic manipulation that decouples the task into 'move' (coarse relocation) and 'operate' (contact-critical interaction) phases. It uses a dual-expert policy architecture with a learnable phase selector, where phase labels are generated automatically by an MLLM pipeline using cues like end-effector velocity and subtask decomposition. Evaluated on RoboTwin2, it reports an average success rate of 68.9%, a 24% improvement over the monolithic π0 baseline, performance comparable to models trained on 10 times more data, and convergence in 40% fewer steps.
Significance. If the empirical claims hold after proper validation, the work demonstrates that explicit behavioral phasing can serve as an effective inductive bias in VLA policies, yielding both higher success rates and substantially improved sample efficiency on high-precision manipulation benchmarks. This could encourage broader adoption of phase-disentangled architectures in robotics, particularly where human-like motor patterns are hypothesized to aid learning.
major comments (2)
- [Abstract] Abstract: The central performance claims (68.9% success, +24% over π0, 40% fewer steps, parity with 10× data models) are presented without any description of the evaluation protocol, number of trials per task, statistical significance tests, variance across seeds, or ablation studies that isolate the contribution of the phase selector versus the dual-expert structure alone. These omissions make it impossible to assess whether the reported gains are attributable to behavioral phasing or to other unablated factors.
- [Method (phase label generation)] Phase-label pipeline (method description): The claim that MLLM-generated labels (conditioned on end-effector velocity and subtask cues) align with human motor patterns and supply a reliable supervisory signal for the learnable phase selector is load-bearing for the paper's interpretation of the results. No quantitative validation against human annotations, inter-annotator agreement, or label-accuracy metrics is provided; without this, systematic misalignment remains a plausible alternative explanation for any observed gains.
minor comments (1)
- [Abstract] Abstract: The RoboTwin2 benchmark is referenced but no breakdown by task category, difficulty, or number of tasks is given, which would help contextualize the aggregate 68.9% figure.
Simulated Author's Rebuttal
We thank the referee for their constructive comments, which help improve the clarity and rigor of our work. We provide point-by-point responses to the major comments and indicate the revisions we will make to the manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central performance claims (68.9% success, +24% over π0, 40% fewer steps, parity with 10× data models) are presented without any description of the evaluation protocol, number of trials per task, statistical significance tests, variance across seeds, or ablation studies that isolate the contribution of the phase selector versus the dual-expert structure alone. These omissions make it impossible to assess whether the reported gains are attributable to behavioral phasing or to other unablated factors.
Authors: We agree that the abstract would benefit from additional context on the experimental setup to better support the performance claims. In the revised version, we will modify the abstract to include a concise description of the evaluation protocol on the RoboTwin2 benchmark, the number of evaluation trials per task, and references to the variance and statistical analyses reported in the main body. We will also highlight that ablations isolating the phase selector's contribution are detailed in the experiments section of the manuscript. revision: yes
-
Referee: [Method (phase label generation)] Phase-label pipeline (method description): The claim that MLLM-generated labels (conditioned on end-effector velocity and subtask cues) align with human motor patterns and supply a reliable supervisory signal for the learnable phase selector is load-bearing for the paper's interpretation of the results. No quantitative validation against human annotations, inter-annotator agreement, or label-accuracy metrics is provided; without this, systematic misalignment remains a plausible alternative explanation for any observed gains.
Authors: We recognize the importance of validating the MLLM-generated phase labels against human judgments to confirm their alignment with human motor patterns. The current approach uses established cues such as end-effector velocity thresholds and subtask decomposition, which have been shown in prior robotics work to correlate with phase transitions. However, we agree that explicit quantitative validation is lacking. In the revised manuscript, we will add an analysis comparing the labels to human annotations on a sampled set of trajectories, including accuracy and agreement metrics. This will strengthen the interpretation of the results. revision: yes
Circularity Check
No circularity: empirical claims rest on external benchmark comparisons without self-referential derivations
full rationale
The paper describes an architectural approach to robotic manipulation that separates move and operate phases, with phase labels generated by an MLLM pipeline and performance measured via success rates on the RoboTwin2 benchmark against external baselines like π0. No equations, derivations, or analytical predictions appear in the provided text. Claims of improved success rates (68.9%, +24% over baseline) and faster convergence are supported by empirical results rather than any reduction of outputs to fitted inputs or self-citations by construction. The method's inductive bias is presented as a design choice, not a derived necessity, and label generation serves as training supervision without circular self-definition.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption MLLM-generated phase labels conditioned on velocity and subtask cues align with human motor patterns
invented entities (1)
-
learnable phase selector routing dual-expert policies
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Segment the entire video into consecutive subtasks that fully cover [0, total frames-1] without gaps/overlaps
-
[2]
• A subtask may have ONE phase OR TWO phases (exactly one move and one operate)
For each subtask, output phases (temporal slices within the subtask): •phase typein{move,operate}. • A subtask may have ONE phase OR TWO phases (exactly one move and one operate). • Do NOT repeat the samephase typewithin a subtask. If you observe another movement, start a NEW subtask
-
[3]
Identify theprimary armand give a concise English description
-
[4]
Predict normalized coordinates fortarget object axisand gripper ends
-
[5]
subtask": 1,
Ensure the entire video contains AT LEAST ONEmovephase. Output Schema:Output STRICTLY a JSON array. No extra text. [ { "subtask": 1, "subtask_description": "...", "primary_arm": "left/right/both/unknown", "phases": [ { "phase_type": "move", "start_frame_idx": 0, "end_frame_idx": 45, ... }, { "phase_type": "operate", "start_frame_idx": 46, "end_frame_idx":...
-
[6]
Do not duplicate aphase typeinside a subtask; instead start a new subtask for the extra action
-
[7]
Each subtask has 1 phase (move/operate) or exactly 2 (one move + one operate) in real temporal order
-
[8]
Return JSON array only
The entire video contains at least onemovephase. Return JSON array only. Figure 12.The dynamic feedback prompt. The <Error Log> is replaced by the actual exception message (e.g., ”Subtask 2 end frame exceeds total frames”), guiding the model to fix the specific issue. B. Detail of Auto-Labeling During the annotation process, we utilized Seed 1.6 Vision as...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.