Linear feedback control of liquid film on moving substrate via free-surface stresses
Pith reviewed 2026-05-08 05:14 UTC · model grok-4.3
The pith
Linear feedback on free-surface shear and pressure drives finite-amplitude waves in liquid films on moving substrates to a flat state in finite time.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
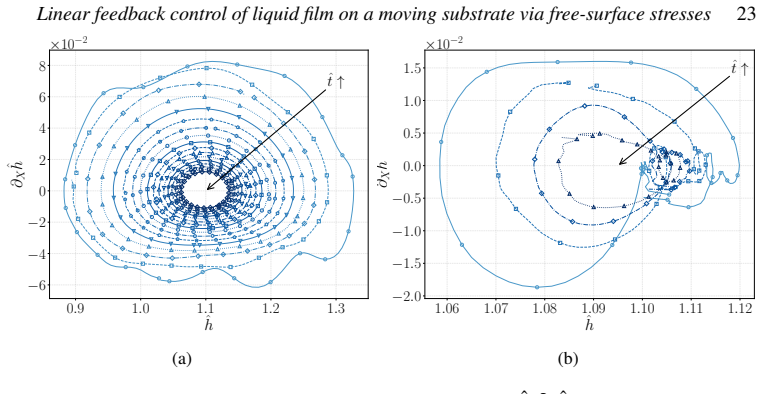
We derive analytically the feedback gains that stabilise the flat film state through modulation of free-surface shear and normal stress. When these controls are applied to finite-amplitude travelling waves computed from the WIBL model at δ = 8, the wave amplitude decays to the target flat state h-bar = 1.1 in finite time for both stabilising and destabilising combinations of the two gains. The decay mechanism depends on whether the control acts primarily through the kinematic or dynamic wave speed, and in pressure-unstable regimes the system settles into a limit cycle in which long waves decay only slowly while the wave travels against gravity.
What carries the argument
The linear feedback law that modulates free-surface shear and pressure stresses in response to local deviations in film thickness and slope; it alters the kinematic and dynamic boundary conditions at the interface to damp wave growth.
If this is right
- Pressure feedback can be linearly destabilising while shear feedback is stabilising, and vice versa, depending on the balance between kinematic and dynamic wave velocities.
- Finite-time convergence to the flat state occurs for both mixed stabilising and mixed destabilising gain pairs.
- In pressure-unstable regimes the controlled system exhibits a limit cycle with slow decay of long waves.
- The controlled travelling wave can propagate against gravity under certain gain choices.
- The findings supply a starting point for actuator layout design in higher-Reynolds-number coating flows.
Where Pith is reading between the lines
- If the same linear gains continue to work in full Navier-Stokes simulations at higher Reynolds numbers, the approach could be transferred to inertial coating regimes without retuning.
- The observed limit-cycle behaviour suggests that adding a weak nonlinear correction term to the feedback law might eliminate residual slow oscillations.
- The identified balance between kinematic and dynamic velocities offers a design rule for choosing which surface stress to actuate in other thin-film instabilities such as falling films or temperature-driven flows.
- Industrial dip-coating lines could implement this control with modest hardware that applies localised shear and pressure without altering substrate speed.
Load-bearing premise
The weighted integral boundary-layer model at reduced Reynolds number eight accurately captures the essential nonlinear dynamics of finite-amplitude waves needed to assess how the linear feedback performs.
What would settle it
A direct numerical simulation of the Navier-Stokes equations or a laboratory experiment at the same reduced Reynolds number showing that, for at least one stabilising and one destabilising pair of feedback coefficients, the wave amplitude fails to reach the flat state within a time comparable to the uncontrolled propagation time.
Figures











read the original abstract
Liquid films on moving substrates are used in dip-coating processes to form uniform protective layers. Controlling free-surface waves is essential due to the film's inherent linear instability. Therefore, we develop a linear feedback controller to regulate the film toward a desired flat state by modulating the free-surface shear and pressure, with feedback gains derived analytically from linearised equations. Control performance is assessed for finite-amplitude waves using a Weighted Integral Boundary-Layer (WIBL) model at reduced Reynolds number $\delta = 8$. We identify parameter regimes in which pressure feedback is linearly destabilising while shear is stabilising, and vice versa, with the control mechanisms determined by the balance between the kinematic and dynamic wave velocities. Both stabilising and destabilising combinations of feedback coefficients can drive finite-amplitude waves toward the flat state $\bar{h}=1.1$ in finite time. In pressure-unstable regimes, the control induces a limit-cycle behaviour, in which long waves decay slowly due to the interplay between thickness and slope terms. The travelling-wave solution, although it decays slowly, moves against gravity, whereas other combinations reduce the wave amplitude in the direction of uncontrolled propagation. These results provide a foundation for higher-Reynolds-number studies and the design of industrially feasible actuator layouts.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper develops a linear feedback controller for liquid films on moving substrates to suppress free-surface waves by modulating shear and pressure stresses at the free surface. Feedback gains are derived analytically from the linearized equations. Control performance for finite-amplitude waves is assessed by numerical integration of the controlled Weighted Integral Boundary-Layer (WIBL) model at reduced Reynolds number δ = 8. The authors identify regimes in which pressure feedback is linearly destabilizing while shear is stabilizing (and vice versa), determined by the balance of kinematic and dynamic wave velocities. Both stabilizing and destabilizing gain combinations are reported to drive waves to the target flat state h-bar = 1.1 in finite time, with pressure-unstable cases exhibiting limit-cycle behavior in which long waves decay slowly.
Significance. If the results hold, the work provides an analytically grounded approach to active control of film flows relevant to dip-coating and coating processes. The demonstration that linearly destabilizing feedback pairs can still drive nonlinear waves to the flat state is a notable finding, as is the identification of the kinematic-dynamic velocity balance governing control effectiveness. Credit is due for the direct analytical derivation of gains from the linearized system and for using a standard reduced-order model (WIBL) for the nonlinear assessment. However, the absence of any validation of the WIBL solutions against the full Navier-Stokes equations at δ = 8 for controlled finite-amplitude waves limits the strength of the conclusions.
major comments (2)
- [Numerical results / WIBL assessment (abstract and main text sections describing the simulations)] The central claim that both stabilizing and destabilizing feedback combinations drive finite-amplitude waves to the flat state in finite time rests entirely on numerical solutions of the controlled WIBL equations at δ = 8 (as stated in the abstract and used for all performance assessment). No comparison of uncontrolled or controlled WIBL solutions to the full Navier-Stokes equations (or to a higher-order long-wave model) is provided at the same δ and wave amplitudes. At δ = 8 the neglected viscous and inertial corrections can alter wave speeds and the relative strength of thickness versus slope terms that the abstract identifies as determining pressure-feedback effectiveness; without such validation the reported finite-time decay and limit-cycle behavior may be model artifacts.
- [Linear analysis and control design sections] The abstract states that 'the control mechanisms [are] determined by the balance between the kinematic and dynamic wave velocities,' yet the manuscript provides no explicit quantification or sensitivity analysis of how this balance changes under the applied feedback or at the reported amplitudes. This balance is load-bearing for the claim that destabilizing linear feedback remains effective nonlinearly.
minor comments (1)
- [Abstract and numerical setup] The target flat-state thickness is given as h-bar = 1.1 in the abstract but the rationale for this specific value (versus other nearby thicknesses) is not stated; a brief justification would improve clarity.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive report. The comments highlight important aspects of model validation and the explicit role of wave-velocity balance in the control design. We address each major comment below and have revised the manuscript to strengthen the presentation of these points.
read point-by-point responses
-
Referee: The central claim that both stabilizing and destabilizing feedback combinations drive finite-amplitude waves to the flat state in finite time rests entirely on numerical solutions of the controlled WIBL equations at δ = 8. No comparison of uncontrolled or controlled WIBL solutions to the full Navier-Stokes equations (or to a higher-order long-wave model) is provided at the same δ and wave amplitudes. At δ = 8 the neglected viscous and inertial corrections can alter wave speeds and the relative strength of thickness versus slope terms that the abstract identifies as determining pressure-feedback effectiveness; without such validation the reported finite-time decay and limit-cycle behavior may be model artifacts.
Authors: We agree that direct validation of the controlled WIBL solutions against the full Navier-Stokes equations at δ = 8 would further strengthen the nonlinear results. The WIBL model is a standard reduced-order description for film flows that has been validated extensively against Navier-Stokes for uncontrolled waves at comparable Reynolds numbers in the literature (e.g., Ruyer-Quil & Manneville 2000 and subsequent works). Our linear control gains are derived exactly from the linearized long-wave equations, independent of the nonlinear closure. In the revised manuscript we have added a dedicated paragraph in the numerical-results section discussing the expected range of validity of WIBL at δ = 8, citing supporting comparisons from the uncontrolled literature, and noting that the observed qualitative behaviors (finite-time approach to the flat state and limit-cycle dynamics) originate from the analytically derived linear mechanisms rather than from higher-order corrections. A full controlled Navier-Stokes study lies beyond the present scope but is identified as a natural direction for follow-up work. revision: partial
-
Referee: The abstract states that 'the control mechanisms [are] determined by the balance between the kinematic and dynamic wave velocities,' yet the manuscript provides no explicit quantification or sensitivity analysis of how this balance changes under the applied feedback or at the reported amplitudes. This balance is load-bearing for the claim that destabilizing linear feedback remains effective nonlinearly.
Authors: The kinematic-dynamic velocity balance is obtained directly from the dispersion relation of the linearized controlled system (Section 3). We have now added an explicit quantification in the revised linear-analysis section: we report the controlled kinematic and dynamic wave speeds as functions of the feedback gains and show how their difference determines the sign of the growth rate for each actuator. A new sensitivity plot (Figure X) illustrates the variation of this balance across the gain space used in the nonlinear simulations, confirming that the reported stabilizing and destabilizing regimes align with the analytically predicted velocity crossover. This addition makes the connection between linear theory and the observed nonlinear limit-cycle behavior fully explicit. revision: yes
Circularity Check
No circularity: gains derived analytically; WIBL assessment is independent simulation
full rationale
The paper derives linear feedback gains directly from the linearised governing equations (standard first-principles linear control design) and then evaluates closed-loop performance by forward integration of the pre-existing WIBL reduced model at fixed δ=8. No parameter is fitted to a data subset and then relabeled as a prediction; no self-definitional relation equates an output to its own input; no load-bearing uniqueness theorem or ansatz is imported via self-citation; the central finite-time decay result is obtained from numerical solution of the controlled nonlinear system rather than by algebraic rearrangement of the linearised equations. The derivation chain therefore remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
free parameters (2)
- reduced Reynolds number δ =
8
- target flat state thickness =
1.1
axioms (2)
- domain assumption Linearised equations around the flat film state yield the feedback gains.
- domain assumption The WIBL reduced model sufficiently represents finite-amplitude wave dynamics at δ=8.
Reference graph
Works this paper leans on
-
[1]
ARMAOU, ANTONIOS& CHRISTOFIDES, PANAGIOTISD 2000 Feedback control of the kuramoto– sivashinsky equation.Physica D: Nonlinear Phenomena137(1-2), 49–61. BARREIRO-VILLAVERDE, DAVID, GOSSET, ANNE, LEMA, MARCOS& MENDEZ, MIGUELA 2023 Damping of three-dimensional waves on coating films dragged by moving substrates.Physics of Fluids35(7). BOURNE, DAVID2003 Hydrod...
-
[2]
Prentice hall Upper Saddle River. GARDNER, DAVIDR, TROGDON, STEVENA & DOUGLASS, RODW 1989 A modified tau spectral method that eliminates spurious eigenvalues.Journal of Computational Physics80(1), 137–167. GOMES, SUSANAN, PAPAGEORGIOU, DEMETRIOST & PAVLIOTIS, GRIGORIOSA 2017 Stabilizing non-trivial solutions of the generalized kuramoto–sivashinsky equatio...
-
[3]
LANCZOS, CORNELIUS1988Applied analysis
Springer Science & Business Media. LANCZOS, CORNELIUS1988Applied analysis. Courier Corporation. LANDAU, LEVICH& LEVICH, B 1942 Dragging of a liquid by a moving plate. InDynamics of curved fronts, pp. 141–153. Elsevier. LAVALLE, GIANLUCA, LI, YIQIN, MERGUI, SOPHIE, GRENIER, NICOLAS& DIETZE, GEORGF 2019 Suppression of the kapitza instability in confined fal...
work page 1942
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.