Toward Low-Altitude Embodied Intelligence: A Sensing-Communication-Computation-Control Closed-Loop Perspective
Pith reviewed 2026-05-08 01:56 UTC · model grok-4.3
The pith
Low-altitude embodied intelligence integrates sensing, communication, computation, and control into a closed loop for UAVs to respond timely and safely in complex environments.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
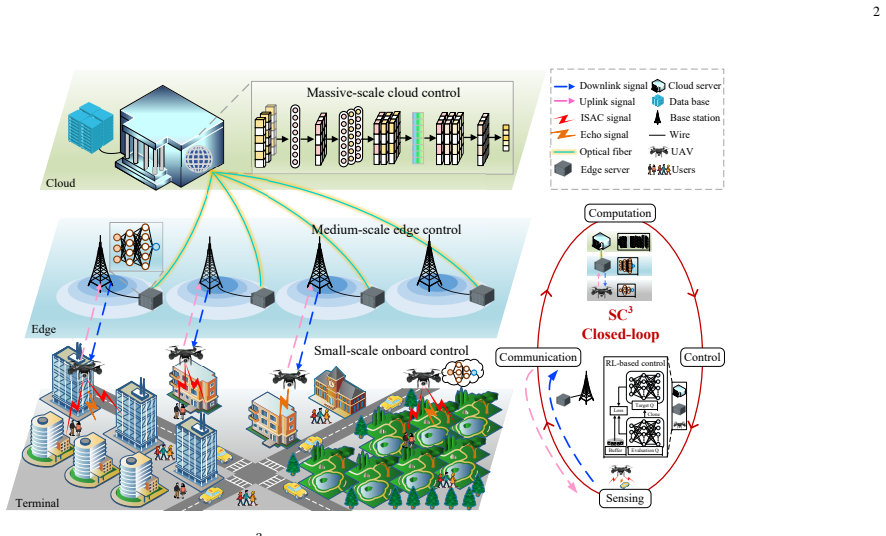
LAEI networks integrate sensing, communication, computation, and control (SC³) into a closed loop to enable timely, effective, and safe UAV responses in complex or unknown environments. The architecture supports diverse low-altitude scenarios, with key techniques for information exchange and decision feedback, illustrated by a case study of a UAV operating in an unknown urban area.
What carries the argument
The SC³ closed loop, which tightly couples sensing, communication, computation, and control to create continuous feedback for UAV decision-making.
Load-bearing premise
The four SC³ functions can be integrated tightly enough in real hardware and software to deliver closed-loop benefits without prohibitive latency, energy, or reliability problems.
What would settle it
An experiment where a UAV with integrated SC³ loop fails to avoid obstacles or complete a mission in an unknown area due to communication delays or computation bottlenecks.
Figures



read the original abstract
The rapid growth of the low-altitude economy drives increasingly autonomous unmanned aerial vehicle (UAV) operations, giving rise to low-altitude embodied intelligence (LAEI), in which sensing, communication, computation, and control (SC$^3$) are tightly integrated to enable closed-loop interaction, ensuring timely, effective, and safe responses in complex or unknown environments. This article systematically explores the LAEI networks, from its fundamental architecture to the diverse scenarios that it can support. We examine key enabling techniques that sustain timely information exchange and effective decision feedback within the $\text{SC}^3$ closed loop. A representative low-altitude UAV mission in an unknown urban area is presented as a case study, where the UAV provides communication services and performs environmental sensing to inform closed-loop control, illustrating how coordinated $\text{SC}^3$ capabilities enable efficient and responsive operation. By identifying major challenges and outlining future research directions, this work serves as a cornerstone for developing next-generation low-altitude intelligent systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript defines low-altitude embodied intelligence (LAEI) as the tight integration of sensing, communication, computation, and control (SC³) into a closed-loop architecture for UAVs, enabling timely and safe operation in complex environments. It systematically examines the LAEI network architecture, supported scenarios, enabling techniques for information exchange and decision feedback, a qualitative case study of a UAV providing communication and sensing services in an unknown urban area to inform closed-loop control, and concludes by outlining open challenges and future directions.
Significance. If the proposed SC³ closed-loop integration proves feasible, the work could provide a valuable unifying perspective for research on autonomous UAV systems in the emerging low-altitude economy. The manuscript explicitly frames integration difficulties as open problems and supplies a high-level architecture plus illustrative case study, which are strengths for a perspective paper and can guide subsequent empirical studies. No quantitative performance claims or formal proofs are made, so the contribution is primarily conceptual and organizational rather than demonstrative.
minor comments (3)
- Abstract: The phrase 'LAEI networks' is used before the architecture is described in detail; a brief parenthetical clarification of the term at first use would improve immediate readability for readers outside the subfield.
- Case study section: The description remains entirely qualitative with no high-level latency, energy, or reliability estimates drawn from literature or simple models; adding one or two illustrative numbers would make the closed-loop benefit more concrete without altering the perspective nature of the paper.
- Notation: SC³ appears both as SC^3 and as text{SC}^3 in different places; consistent use of the math-mode form throughout would eliminate minor typographic inconsistency.
Simulated Author's Rebuttal
We thank the referee for the positive assessment of our perspective paper and the recommendation for minor revision. The referee's summary accurately reflects the manuscript's focus on the SC³ closed-loop architecture for low-altitude embodied intelligence, its architecture, scenarios, enabling techniques, case study, and open challenges. As no specific major comments were provided, we will incorporate minor revisions to improve clarity, flow, and presentation where appropriate.
Circularity Check
No significant circularity: descriptive perspective paper with no derivations or predictions
full rationale
The manuscript is explicitly framed as a perspective paper. It defines LAEI via the SC³ closed-loop integration, surveys architectures/scenarios/enabling techniques, offers a qualitative case study, and lists open challenges. No equations, fitted parameters, quantitative predictions, formal theorems, or empirical results appear. The central claim is definitional and architectural; it does not reduce to any self-referential input, self-citation chain, or renamed known result. All load-bearing statements remain independent of the paper's own outputs.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Sensing, communication, computation, and control can be tightly coupled in UAV hardware and software to form a responsive closed loop.
invented entities (1)
-
Low-altitude embodied intelligence (LAEI)
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Air-ground integrated sensing and communications: Opportunities and challenges,
Z. Fei, X. Wang, N. Wu, J. Huang, and J. A. Zhang, “Air-ground integrated sensing and communications: Opportunities and challenges,” IEEE Commun. Mag., vol. 61, no. 5, pp. 55–61, Feb. 2023
2023
-
[2]
Wireless communications with unmanned aerial vehicles: opportunities and challenges,
Y . Zeng, R. Zhang, and T. J. Lim, “Wireless communications with unmanned aerial vehicles: opportunities and challenges,”IEEE Commun. Mag., vol. 54, no. 5, pp. 36–42, May 2016
2016
-
[3]
J. Luo, Z. Fei, X. Wang, L. Zhao, Y . Cui, G. Zhu, and D. Niyato, “Trajectory design for UA V-based low-altitude wireless networks in unknown environments: A digital twin-assisted TD3 approach,”arXiv preprint arXiv:2510.24255, 2025
-
[4]
Em- bodied artificial intelligence-enabled internet of vehicles: Challenges and solutions,
M. Chen, C. Wang, X. He, F. Zhu, L. Wang, and A. V . Vasilakos, “Em- bodied artificial intelligence-enabled internet of vehicles: Challenges and solutions,”IEEE Veh. Technol. Mag., vol. 20, no. 2, pp. 63–70, Mar. 2025
2025
-
[5]
Joint user scheduling, power allocation, and trajectory design for joint synthetic aperture radar and communication UA V systems,
Z. Liu, Z. Fei, X. Wang, P. Liu, S. Xu, J. Zhou, and W. Yuan, “Joint user scheduling, power allocation, and trajectory design for joint synthetic aperture radar and communication UA V systems,”IEEE Trans. Veh. Technol., vol. 74, no. 2, pp. 3006–3016, Oct. 2025
2025
-
[6]
Coverage path planning for multi-view SAR-UA V observation system under energy constraint,
D. Song, X. Zhang, Z. Yu, and K. Qin, “Coverage path planning for multi-view SAR-UA V observation system under energy constraint,” inIGARSS 2025 - 2025 IEEE International Geoscience and Remote Sensing Symposium, 2025, pp. 5482–5486
2025
-
[7]
A phase error reverse recovery method for bistatic forward-looking SAR based on ground combined beam coordinate,
Y . Lou, M. Xing, M. Zhang, P. Ma, and H. Yu, “A phase error reverse recovery method for bistatic forward-looking SAR based on ground combined beam coordinate,”IEEE Trans. Geosci. Remote Sens., vol. 63, pp. 1–15, Nov. 2025
2025
-
[8]
Affine frequency division multiplexing for next generation wireless communications,
A. Bemani, N. Ksairi, and M. Kountouris, “Affine frequency division multiplexing for next generation wireless communications,”IEEE Trans. Wireless Commun., vol. 22, no. 11, pp. 8214–8229, Mar. 2023
2023
-
[9]
Doppler-resilient LEO satellite OFDM transmission with affine frequency domain pilot,
S. Tang, X. Wu, X. Wang, L. Zhao, G. Yang, Z. Liu, F. Liu, and Z. Fei, “Doppler-resilient LEO satellite OFDM transmission with affine frequency domain pilot,”arXiv preprint arXiv:2601.01956, 2026
-
[10]
Reduction of Complex Dynamics in Far-from- equilibrium Systems: Nambu Non-equilibrium Thermodynamics
S. Tang, Z. Fei, X. Wang, D. Zhou, Z. Wei, and C. Masouros, “A novel symbol level precoding based AFDM transmission framework: Offloading equalization burden to transmitter side,”arXiv:2508.12215, Aug. 2025. [Online]. Available: https://doi.org/10.48550/arXiv.2508. 12215
-
[11]
Joint beam- forming and offloading design for integrated sensing, communication, and computation system,
P. Liu, Z. Fei, X. Wang, Y . Zhou, Y . Zhang, and F. Liu, “Joint beam- forming and offloading design for integrated sensing, communication, and computation system,”IEEE Trans. Veh. Technol., vol. 74, no. 9, pp. 14 933–14 937, Apr. 2025
2025
-
[12]
Towards intelligent edge sensing for ISCC network: Joint multi-tier DNN partitioning and beamforming design,
P. Liu, Z. Fei, X. Wang, X. Li, W. Yuan, Y . Li, C. Hu, and D. Niyato, “Towards intelligent edge sensing for ISCC network: Joint multi-tier DNN partitioning and beamforming design,”IEEE Trans. Wireless Commun., pp. 1–1, Nov. 2025
2025
-
[13]
TD3-based trajectory design for UA V-assisted communication in unknown environment,
J. Luo, L. Zhao, C. Yin, X. Wang, and Z. Fei, “TD3-based trajectory design for UA V-assisted communication in unknown environment,” in 2025 IEEE/CIC International Conference on Communications in China (ICCC), 2025, pp. 1–6
2025
-
[14]
Joint task offloading and resource allocation in multi-UA V multi-server systems: An attention-based deep reinforcement learning approach,
G. Wu, Z. Liu, M. Fan, and K. Wu, “Joint task offloading and resource allocation in multi-UA V multi-server systems: An attention-based deep reinforcement learning approach,”IEEE Trans. Veh. Technol., vol. 73, no. 8, pp. 11 964–11 978, Mar. 2024
2024
-
[15]
Trajectory design for UA V-based internet of things data collection: A deep reinforcement learning approach,
Y . Wang, Z. Gao, J. Zhang, X. Cao, D. Zheng, Y . Gao, D. W. K. Ng, and M. Di Renzo, “Trajectory design for UA V-based internet of things data collection: A deep reinforcement learning approach,”IEEE Internet Things J., vol. 9, no. 5, pp. 3899–3912, Mar. 2022
2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.