Evidence-Based Landing Site Selection and Vison-Based Landing for UAVs in Unstructured Environments
Pith reviewed 2026-05-09 14:34 UTC · model grok-4.3
The pith
UAV landing safety is inferred by accumulating visual likelihoods of flatness, slope, and obstacles into a belief map before selecting via constrained MAP and descending with visual servoing.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
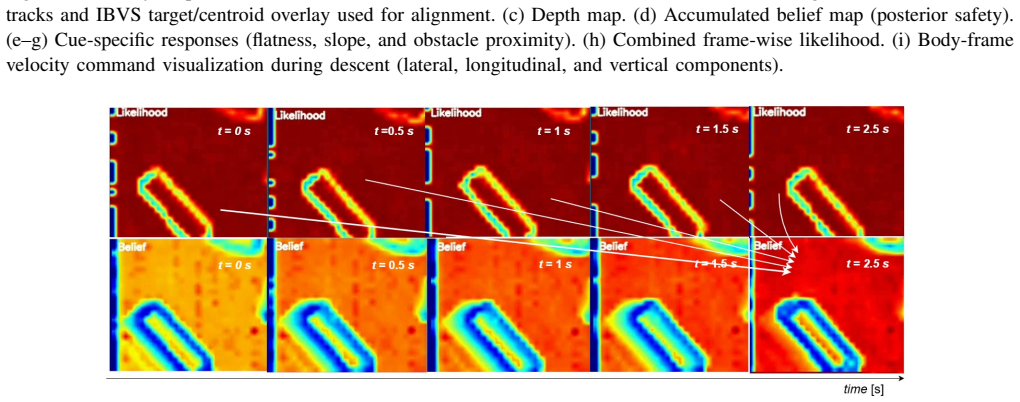
The paper models landing safety as a latent variable inferred via recursive accumulation of frame-wise visual likelihoods from flatness, slope, and obstacle cues. This produces a temporally consistent belief map robust to transient perception errors. Physical feasibility is enforced through a hard geometric constraint on the minimum required landing radius. The landing site is then selected using constrained maximum a posteriori estimation, followed by ORB feature tracking and image-based visual servoing for descent.
What carries the argument
Recursive accumulation of per-frame likelihoods into a belief map for landing safety, combined with a hard minimum-radius geometric constraint and constrained MAP selection.
If this is right
- Transient perception errors do not affect the final selection due to the temporal consistency of the accumulated belief map.
- Sites that are visually promising but too small for the UAV are rejected by the geometric constraint.
- Precise alignment during descent is achieved through ORB-based feature tracking and image-based visual servoing.
- The framework demonstrates consistent performance in both real-world lab experiments and high-fidelity simulations.
Where Pith is reading between the lines
- The approach might generalize to other perception-heavy tasks like object grasping where evidence buildup could improve reliability under uncertainty.
- In field deployments, integrating additional cues such as wind estimates could further enhance the belief map's accuracy.
- This separation of selection and control could inspire similar modular designs in autonomous ground vehicles operating in rough terrain.
Load-bearing premise
The individual visual likelihoods computed from flatness, slope, and obstacle cues are accurate and independent enough that their recursive accumulation reliably estimates the true safety of candidate sites, and the minimum-radius rule captures all necessary physical constraints.
What would settle it
Observe whether the selected landing site remains safe and within the required size when the UAV is subjected to conditions that introduce known transient visual errors, such as added vibration noise in simulation or real tests.
Figures




read the original abstract
Autonomous landing in cluttered or unstructured environments remains a safety-critical challenge for unmanned aerial vehicles (UAVs), particularly under noisy perception caused by sensor uncertainty and platform-induced disturbances such as vibration. This paper presents an evidence-based probabilistic framework for autonomous UAV landing that explicitly separates decision-making under uncertainty from execution via visual servoing. Landing safety is modeled as a latent variable and inferred through recursive accumulation of frame-wise visual likelihoods derived from flatness, slope, and obstacle cues, yielding a temporally consistent belief map that is robust to transient perception errors. Physical feasibility is enforced through a hard geometric constraint based on the minimum required landing radius of the UAV, ensuring that undersized but visually appealing regions are rejected. The final landing site is selected using constrained maximum a posteriori estimation. Once selected, the UAV locks onto the target region using ORB feature tracking and performs precise alignment and descent via image-based visual servoing (IBVS). The proposed approach is validated through both real-world laboratory experiments and high-fidelity simulations in Nvidia Isaac Sim, demonstrating consistent, cautious, and stable landing behavior across domains.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents an evidence-based probabilistic framework for autonomous UAV landing in unstructured or cluttered environments. Landing safety is modeled as a latent variable s and inferred via recursive Bayesian accumulation of per-frame visual likelihoods p(z_t | s) derived from flatness, slope, and obstacle cues, producing a temporally consistent belief map claimed to be robust to transient perception errors. Physical feasibility is enforced by a hard geometric minimum-radius constraint, with the final site selected via constrained maximum a posteriori estimation. Execution then uses ORB feature tracking and image-based visual servoing (IBVS) for alignment and descent. The approach is stated to be validated in laboratory experiments and Nvidia Isaac Sim simulations, demonstrating consistent and stable landing behavior.
Significance. If the independence assumptions hold and the claimed robustness is quantitatively supported, the separation of probabilistic site selection from visual-servoing execution offers a principled way to handle sensor uncertainty and platform disturbances in safety-critical UAV landing. The recursive belief-map construction and explicit geometric constraint are conceptually clean design choices that could improve caution in unstructured settings. However, the absence of reported error metrics, ablation studies, or quantitative validation results in the manuscript limits assessment of practical impact.
major comments (2)
- [Abstract / recursive belief update] Abstract and the recursive update description: The central robustness claim—that the belief map p(s | z_{1:t}) is robust to transient perception errors—rests on the recursive Bayesian update p(s | z_{1:t}) ∝ p(s | z_{1:t-1}) · p(z_t | s) treating frame-wise likelihoods from flatness/slope/obstacle cues as conditionally independent observations. This assumption is load-bearing for the entire pipeline yet is not justified against temporal correlations induced by UAV vibration, ego-motion, motion blur, or lighting changes, which can cause overconfidence in spurious regions or slow recovery, contrary to the stated robustness. The hard radius constraint does not address this statistical dependence.
- [Abstract / experimental validation] Validation claims: The abstract asserts validation in real-world laboratory experiments and Isaac Sim but supplies no quantitative results, error metrics (e.g., landing success rate, position error, belief-map convergence time), ablation studies on the likelihood functions, or comparison against baselines. Without these, the empirical support for the robustness and consistency claims cannot be assessed and is load-bearing for the paper's contribution.
minor comments (2)
- [Title] Title contains a typo: 'Vison-Based' should be 'Vision-Based'.
- [Abstract / method description] Notation for the latent variable, likelihoods, and belief map is introduced in the abstract but would benefit from explicit equations and definitions in the main text for reproducibility.
Simulated Author's Rebuttal
We thank the referee for their constructive and detailed comments. We address each major comment point by point below, providing honest clarifications and indicating revisions where the manuscript requires strengthening.
read point-by-point responses
-
Referee: [Abstract / recursive belief update] Abstract and the recursive update description: The central robustness claim—that the belief map p(s | z_{1:t}) is robust to transient perception errors—rests on the recursive Bayesian update p(s | z_{1:t}) ∝ p(s | z_{1:t-1}) · p(z_t | s) treating frame-wise likelihoods from flatness/slope/obstacle cues as conditionally independent observations. This assumption is load-bearing for the entire pipeline yet is not justified against temporal correlations induced by UAV vibration, ego-motion, motion blur, or lighting changes, which can cause overconfidence in spurious regions or slow recovery, contrary to the stated robustness. The hard radius constraint does not address this statistical dependence.
Authors: We acknowledge that the manuscript does not explicitly justify the conditional independence assumption against temporal correlations arising from platform dynamics or perception artifacts. The recursive update is presented as a standard Bayesian evidence accumulation mechanism that integrates multi-frame cues to reduce the impact of isolated errors. To address the concern, we will revise the methods section to include an expanded discussion of the assumption, its practical limitations under UAV-induced disturbances, and how the combination of multiple visual cues and the hard geometric constraint mitigate risks of overconfidence. Relevant references on approximate inference in robotics will be added. revision: yes
-
Referee: [Abstract / experimental validation] Validation claims: The abstract asserts validation in real-world laboratory experiments and Isaac Sim but supplies no quantitative results, error metrics (e.g., landing success rate, position error, belief-map convergence time), ablation studies on the likelihood functions, or comparison against baselines. Without these, the empirical support for the robustness and consistency claims cannot be assessed and is load-bearing for the paper's contribution.
Authors: The referee correctly identifies that the manuscript reports only qualitative descriptions of consistent landing behavior without accompanying quantitative metrics, ablations, or baseline comparisons. The current validation focuses on demonstrating feasibility across lab and simulation domains. In the revised version, we will add a dedicated results subsection with quantitative evaluations, including landing success rates, touchdown position/orientation errors, belief-map convergence statistics, and sensitivity analyses on the likelihood functions. Baseline comparisons will be included where data permits. revision: yes
Circularity Check
No significant circularity in the evidence-based landing framework
full rationale
The paper constructs a belief map for landing safety via recursive Bayesian accumulation of per-frame likelihoods computed from independent visual cues (flatness, slope, obstacles), then applies a separate hard geometric radius constraint and constrained MAP selection before switching to ORB-based IBVS. No equation or step reduces the final site selection or belief map to a fitted parameter, self-definition, or self-citation chain; the visual likelihoods and geometric filter are external to the output. This matches the reader's assessment of a self-contained pipeline with no load-bearing reductions by construction.
Axiom & Free-Parameter Ledger
free parameters (1)
- minimum landing radius
axioms (2)
- domain assumption Visual likelihoods from flatness, slope, and obstacle cues can be recursively accumulated to form a temporally consistent posterior belief over landing safety.
- domain assumption ORB feature tracking and image-based visual servoing can achieve precise alignment once a site is selected.
invented entities (1)
-
latent landing safety variable
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Vision-based autonomous uav landing: A compre- hensive review of technologies, techniques, and applications,
S. O. Semerikov, P. P. Nechypurenko, T. A. Vakaliuk, I. S. Mintii, and A. O. Kolhatin, “Vision-based autonomous uav landing: A compre- hensive review of technologies, techniques, and applications,”Journal of Intelligent and Robotic Systems, vol. 111, p. 115, 2025
2025
-
[2]
Autonomous landing at unprepared sites by a full scale helicopter,
S. Scherer, L. Chamberlain, and S. Singh, “Autonomous landing at unprepared sites by a full scale helicopter,” inProceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2012, pp. 2542–2549
2012
-
[3]
Autonomous landing of an unmanned aerial vehicle in a constrained environment,
D. A. Johnson and S. Scherer, “Autonomous landing of an unmanned aerial vehicle in a constrained environment,”Journal of Field Robotics, vol. 32, no. 6, pp. 869–889, 2015
2015
-
[4]
Vision based safe landing site detection for unmanned aerial vehicles,
J. Bosch, J. Ferrer, and A. Sanfeliu, “Vision based safe landing site detection for unmanned aerial vehicles,” inProceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2014, pp. 5480–5485
2014
-
[5]
Autonomous landing of a quadrotor on a moving platform,
A. Barry and A. P. Schoellig, “Autonomous landing of a quadrotor on a moving platform,” inProceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2015, pp. 1550– 1556
2015
-
[6]
Active and adaptive landing site selection for autonomous aerial robots,
T. Hinzmann, T. Stastny, and R. Siegwart, “Active and adaptive landing site selection for autonomous aerial robots,” inProceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2018
2018
-
[7]
Vision based autonomous landing of uavs using deep neural networks,
Y . Zhang, Q. Zhang, and S. Liu, “Vision based autonomous landing of uavs using deep neural networks,”IEEE Access, vol. 6, pp. 18 644– 18 656, 2018
2018
-
[8]
Learning based safe landing site de- tection for multirotor aerial vehicles,
S. Kim, J. Park, and H. J. Kim, “Learning based safe landing site de- tection for multirotor aerial vehicles,”IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 2876–2883, 2021
2021
-
[9]
Learning to detect safe landing zones for autonomous drones,
B. Planche, M. Labb ´e, and J. Sivic, “Learning to detect safe landing zones for autonomous drones,”IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 3767–3774, 2022
2022
-
[10]
Emergency uav landing on unknown field using depth enhanced graph structure,
J. Chen, W. Du, J. Lin, U. M. Borhan, Y . Lin, B. Du, X. Li, and J. Li, “Emergency uav landing on unknown field using depth enhanced graph structure,”IEEE Transactions on Automation Science and Engineering, 2025
2025
-
[11]
Vision-based optimal landing guidance law for vtol uavs on a moving platform,
W. Jang, M. Cho, and H. Lim, “Vision-based optimal landing guidance law for vtol uavs on a moving platform,”International Journal of Aeronautical and Space Sciences, vol. 26, no. 4, pp. 1708–1731, 2025
2025
-
[12]
Depth-based safe landing for unmanned aerial vehicles,
M. A. Cerdaet al., “Depth-based safe landing for unmanned aerial vehicles,”Drones, vol. 9, no. 11, p. 764, 2025
2025
-
[13]
Reinforcement learning-based monocular vision approach for autonomous uav landing,
T. Houichime and Y . El Amrani, “Reinforcement learning-based monocular vision approach for autonomous uav landing,”arXiv preprint arXiv:2505.06963, 2025
-
[14]
Simulation and real-life implementation of uav autonomous landing,
R. Baidyaet al., “Simulation and real-life implementation of uav autonomous landing,”Frontiers in Robotics and AI, vol. 11, 2024
2024
-
[15]
Visual servo control. part i. basic approaches,
F. Chaumette and S. Hutchinson, “Visual servo control. part i. basic approaches,”IEEE Robotics and Automation Magazine, vol. 13, no. 4, pp. 82–90, 2006
2006
-
[16]
Corke,Robotics, Vision and Control
P. Corke,Robotics, Vision and Control. Springer, 2011
2011
-
[17]
Survey of advances in guidance, navigation, and control of unmanned rotorcraft systems,
F. Kendoul, “Survey of advances in guidance, navigation, and control of unmanned rotorcraft systems,”Journal of Field Robotics, vol. 29, no. 2, pp. 315–378, 2012
2012
-
[18]
Evaluation of precision uav landing in mountainous terrain,
P. Kurdel, N. Gecejov ´a, M. Ce ˇskoviˇc, and A. Yakovlieva, “Evaluation of precision uav landing in mountainous terrain,”Aerospace, vol. 11, no. 1, p. 82, 2024
2024
-
[19]
Orb: An efficient alternative to SIFT or SURF,
E. Rublee, V . Rabaud, K. Konolige, and G. Bradski, “Orb: An efficient alternative to SIFT or SURF,” inProceedings of the IEEE International Conference on Computer Vision (ICCV), 2011, pp. 2564– 2571
2011
-
[20]
Isaac sim: High-fidelity simulation for robotics,
NVIDIA, “Isaac sim: High-fidelity simulation for robotics,” https:// developer.nvidia.com/isaac-sim, 2023, accessed: Jan. 2025
2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.