Bi3: A Biplatform, Bicultural, Biperson Dataset for Social Robot Navigation
Pith reviewed 2026-05-11 01:27 UTC · model grok-4.3
The pith
A new dataset records close robot navigation encounters with pairs of humans using two platforms and participants from the USA and France to benchmark diverse social interactions.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
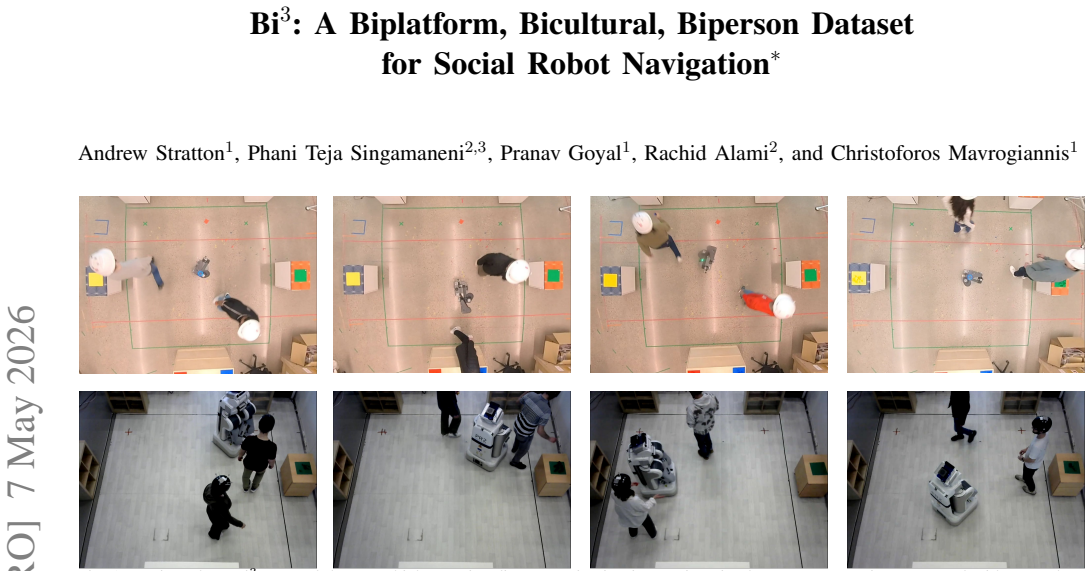
Bi3 is a dataset of social robot navigation featuring an experiment design that produces close encounters between two humans and one robot, collected across five navigation algorithms, two robot platforms, and a participant pool of 74 people from two countries, with 10.5 hours of multimodal ground-truth motion tracks, RGB video, and impressions, whose metrics indicate a benchmark level of diversity and complexity for studying how humans and robots mesh activities in constrained environments.
What carries the argument
The Bi3 dataset itself, built around close two-human-one-robot navigation encounters recorded with varied algorithms, platforms, and bicultural participants.
If this is right
- The dataset supports training of human motion prediction models suited to dense crowds.
- It enables development of robot control policies for navigation in constrained spaces.
- Researchers can compare performance across five algorithms and two platforms using the same participant groups.
- The multimodal recordings including user impressions allow study of how people perceive robot behavior during navigation.
Where Pith is reading between the lines
- The bicultural aspect could be used to test whether navigation preferences differ systematically between the two recruitment sites.
- Models trained on this data might be extended to predict interactions in larger groups beyond the two-person encounters recorded here.
- The dataset could serve as a starting point for creating simulation environments that incorporate real participant feedback on robot performance.
Load-bearing premise
Data gathered in a constrained lab from participants recruited at two specific sites using the chosen metrics of interaction density and velocity captures real-world social navigation diversity and complexity without major bias from the artificial setting.
What would settle it
A direct comparison showing that interaction density and human velocity values in Bi3 fall within the range of existing social navigation datasets or that policies trained on Bi3 fail to generalize to uncontrolled crowded environments would undermine the claim of unique benchmark complexity.
Figures






read the original abstract
We contribute Bi3, a dataset of social robot navigation among groups of people in a constrained lab space. Compared to prior data collection efforts for social robot navigation, our dataset is unique in that it features: an original experiment design giving rise to close navigation encounters between two humans and a robot; five different navigation algorithms; two different robot platforms; a diverse participant pool of 74 people recruited from two sites in the USA and France; multimodal data streams including 10.5 hours of human and robot ground-truth motion tracks, RGB video, and user impressions over robot performance. Our analysis of the collected dataset through metrics like interaction density and human velocity suggests that Bi3 represents a benchmark of unique diversity and modeling complexity. Bi3 contributes towards understanding how humans and robots can productively mesh their activities in constrained environments, and can be a resource for training models of human motion prediction and robot control policies for navigation in densely crowded spaces.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper contributes the Bi3 dataset for social robot navigation, collected from 74 participants in a lab setting involving close encounters between two humans and a robot. It uses five navigation algorithms on two different robot platforms, recruiting from sites in the USA and France, and includes 10.5 hours of multimodal data: ground-truth motion tracks, RGB video, and user impressions. The authors' analysis using metrics such as interaction density and human velocity leads them to conclude that Bi3 provides a benchmark with unique diversity and modeling complexity for training human motion prediction and robot control policies.
Significance. Should the analysis hold and the dataset prove to have greater complexity than existing ones without lab-induced biases, Bi3 would be a significant addition to the field, offering a resource for studying human-robot meshing in constrained environments and improving navigation in densely crowded spaces. The bicultural and biplatform aspects add to its potential value for generalizable models.
major comments (2)
- [Abstract] The central claim in the abstract that analysis of interaction density and human velocity shows Bi3 has 'unique diversity and modeling complexity' is not supported by any quantitative benchmarking against prior social navigation datasets. No tables, figures, or statistical comparisons of metric distributions are referenced, which is required to substantiate uniqueness given the constrained lab setting.
- [Experiment Design] The experiment relies on a constrained lab space and recruitment limited to two specific sites; without explicit analysis of potential artifacts in velocity variance or interaction density (e.g., via comparison to unconstrained settings or statistical tests for site effects), the assumption that the metrics capture representative real-world diversity remains unverified and load-bearing for the benchmark claim.
minor comments (1)
- [Abstract] The abstract would benefit from a brief sentence on data release format and access (e.g., whether tracks are in standard ROS bag or CSV format) to aid immediate usability by the community.
Simulated Author's Rebuttal
We thank the referee for their detailed review and constructive comments on our manuscript. We have carefully considered the points raised regarding the substantiation of our claims and the experimental design. Below, we provide point-by-point responses and indicate the revisions we will make to address these concerns.
read point-by-point responses
-
Referee: [Abstract] The central claim in the abstract that analysis of interaction density and human velocity shows Bi3 has 'unique diversity and modeling complexity' is not supported by any quantitative benchmarking against prior social navigation datasets. No tables, figures, or statistical comparisons of metric distributions are referenced, which is required to substantiate uniqueness given the constrained lab setting.
Authors: We agree with this observation. The uniqueness of Bi3 is primarily derived from its novel experimental design featuring biperson encounters, bicultural participants, biplatform robots, and multimodal data collection, rather than from direct metric comparisons. Our analysis using interaction density and human velocity was intended to characterize the dataset's properties, not to benchmark against existing datasets. To address this, we will revise the abstract to tone down the claim, stating that the metrics suggest high interaction complexity in our setup, and we will add a new table or figure providing qualitative comparisons to key statistics from prior social navigation datasets where publicly available data allows. This revision will clarify the basis for our benchmark claim. revision: yes
-
Referee: [Experiment Design] The experiment relies on a constrained lab space and recruitment limited to two specific sites; without explicit analysis of potential artifacts in velocity variance or interaction density (e.g., via comparison to unconstrained settings or statistical tests for site effects), the assumption that the metrics capture representative real-world diversity remains unverified and load-bearing for the benchmark claim.
Authors: We acknowledge the importance of addressing potential biases from the lab setting. The constrained space was chosen to facilitate safe, repeatable close encounters between two humans and the robot. We will add a dedicated limitations subsection discussing possible artifacts in velocity and interaction metrics due to the lab environment. Additionally, we will perform and report statistical tests (e.g., t-tests or ANOVA) for site effects between the USA and France participant groups on key metrics like velocity variance and interaction density. However, we do not have access to comparable data from unconstrained real-world settings, so direct comparisons to such environments cannot be provided. revision: partial
- Direct comparison of interaction density and velocity metrics to unconstrained real-world settings, as the study was conducted in a controlled lab environment and no such external data was collected.
Circularity Check
No circularity: empirical dataset contribution with no derivations or self-referential claims
full rationale
The paper is a data-collection contribution describing Bi3, a new social robot navigation dataset. Its central claim rests on post-collection analysis of empirical metrics (interaction density, human velocity) from 74 participants. No equations, fitted parameters, predictions, or derivations appear in the provided text. The uniqueness/diversity assertion is presented as a direct suggestion from the data rather than a reduction to prior self-citations or definitions. No load-bearing self-citation chains, ansatzes, or renamings are invoked. Per the guidelines, this is a self-contained empirical contribution; the absence of any mathematical or definitional reduction warrants score 0.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Metrics such as interaction density and human velocity accurately quantify modeling complexity and diversity of social navigation.
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
five different navigation algorithms; two different robot platforms; a diverse participant pool of 74 people recruited from two sites
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
J. Amirian, B. Zhang, F. V . Castro, J. J. Baldelomar, J.-B. Hayet, and J. Pettr ´e. Opentraj: Assessing prediction complexity in human trajectories datasets. InProceedings of the Asian Conference on Computer Vision (ACCV), pages 566–582, 2020
work page 2020
-
[2]
D. Br ˇsˇci´c, T. Kanda, T. Ikeda, and T. Miyashita. Person tracking in large public spaces using 3-d range sensors.IEEE Transactions on Human-Machine Systems, 43(6):522–534, 2013
work page 2013
-
[3]
C. M. Carpinella, A. B. Wyman, M. A. Perez, and S. J. Stroessner. The robotic social attributes scale (RoSAS): Development and validation. InProceedings of the ACM/IEEE International Conference on Human- Robot Interaction (HRI), page 254–262, 2017
work page 2017
-
[4]
P. F. Christiano, J. Leike, T. B. Brown, M. Martic, S. Legg, and D. Amodei. Deep reinforcement learning from human preferences. In Proceedings of the International Conference on Neural Information Processing Systems (NIPS), page 4302–4310, 2017
work page 2017
-
[5]
M. Ehsanpour, F. Saleh, S. Savarese, I. Reid, and H. Rezatofighi. Jrdb- act: A large-scale dataset for spatio-temporal action, social group and activity detection. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2022
work page 2022
- [6]
-
[7]
S. Fujimoto, D. Meger, and D. Precup. Off-policy deep reinforcement learning without exploration. InInternational Conference on Machine Learning, 2018
work page 2018
-
[8]
Y . Gao and C.-M. Huang. Evaluation of socially-aware robot naviga- tion.Frontiers in Robotics and AI, 8, 01 2022
work page 2022
- [9]
-
[10]
J. Han, N. Rhinehart, H. Thomas, J. Zhang, and T. D. Barfoot. DR- MPC: Deep residual model predictive control for real-world social navigation. InIEEE Robotics and Automation Letters, 2025
work page 2025
-
[11]
A. Hanna, S. Larsson, P.-L. G ¨otvall, and K. Bengtsson. Deliberative safety for industrial intelligent human–robot collaboration: Regulatory challenges and solutions for taking the next step towards industry 4.0. Robotics and Computer-Integrated Manufacturing, 78:102386, 2022
work page 2022
-
[12]
S. G. Hart and L. E. Staveland. Development of nasa-tlx (task load index): Results of empirical and theoretical research.Human Mental Workload, 1(3):139–183, 1988
work page 1988
- [13]
- [14]
-
[15]
R. Kirby.Social Robot Navigation. PhD thesis, Carnegie Mellon University, 2010
work page 2010
-
[16]
M. Kollmitz, K. Hsiao, J. Gaa, and W. Burgard. Time dependent planning on a layered social cost map for human-aware robot naviga- tion. InProceedings of the European Conference on Mobile Robots (ECMR), pages 1–6, 2015
work page 2015
-
[17]
L. Landolfi, D. Pasquali, A. Nardelli, J. Bernotat, and F. Rea. Working Memory-Based Architecture for Human-Aware Navigation in Indus- trial Settings. InProceedings of the IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), pages 1878–1885, 2023
work page 2023
- [18]
-
[19]
M. Li, B. Zhong, E. Lobaton, and H. Huang. Fusion of human gaze and machine vision for predicting intended locomotion mode.IEEE Transactions on Neural Systems and Rehabilitation Engineering, 30: 1103–1112, 2022
work page 2022
-
[20]
B. Majecka. Statistical models of pedestrian behaviour in the forum. Master’s thesis, School of Informatics, University of Edinburgh, 2009
work page 2009
-
[21]
K. Mangalam, Y . An, H. Girase, and J. Malik. From goals, waypoints & paths to long term human trajectory forecasting. InProceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), pages 15213–15222, 2021
work page 2021
-
[22]
R. Martin-Martin, M. Patel, H. Rezatofighi, A. Shenoi, J. Gwak, E. Frankel, A. Sadeghian, and S. Savarese. JRDB: A dataset and benchmark of egocentric robot visual perception of humans in built environments.IEEE Transactions on Pattern Analysis and Machine Intelligence, 2021
work page 2021
-
[23]
C. Mavrogiannis, P. Alves-Oliveira, W. Thomason, and R. A. Knepper. Social Momentum: Design and Evaluation of a Framework for Socially Competent Robot Navigation.ACM Transactions on Human-Robot Interaction, 11(2):14:1–14:37, Feb. 2022
work page 2022
-
[24]
C. Mavrogiannis, K. Balasubramanian, S. Poddar, A. Gandra, and S. S. Srinivasa. Winding through: Crowd navigation via topological invariance.IEEE Robotics and Automation Letters, 8(1):121–128, 2023
work page 2023
-
[25]
C. Mavrogiannis, F. Baldini, A. Wang, D. Zhao, P. Trautman, A. Ste- infeld, and J. Oh. Core Challenges of Social Robot Navigation: A Survey.Transactions on Human-Robot Interaction, 12(3), 2023
work page 2023
-
[26]
D. M. Nguyen, M. Nazeri, A. Payandeh, A. Datar, and X. Xiao. Toward Human-Like Social Robot Navigation: A Large-Scale, Multi- Modal, Social Human Navigation Dataset. InProceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 7442–7447, 2023
work page 2023
-
[27]
D. Paez-Granados, Y . He, D. Gonon, D. Jia, B. Leibe, K. Suzuki, and A. Billard. Pedestrian-robot interactions on autonomous crowd navigation: Reactive control methods and evaluation metrics. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 149–156, 2022
work page 2022
-
[28]
S. Pellegrini, A. Ess, K. Schindler, and L. Van Gool. You’ll never walk alone: Modeling social behavior for multi-target tracking. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), pages 261–268, 2009
work page 2009
- [29]
-
[30]
A. H. Raj, Z. Hu, H. Karnan, R. Chandra, A. Payandeh, L. Mao, P. Stone, J. Biswas, , and X. Xiao. Rethinking social robot navigation: Leveraging the best of two worlds. InProceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2024
work page 2024
-
[31]
A. Robicquet, A. Sadeghian, A. Alahi, and S. Savarese. Learning social etiquette: Human trajectory understanding in crowded scenes. In Proceedings of the European Conference on Computer Vision (ECCV), volume 9912, pages 549–565, 10 2016
work page 2016
-
[32]
A. Rudenko, T. P. Kucner, C. S. Swaminathan, R. T. Chadalavada, K. O. Arras, and A. J. Lilienthal. TH ¨OR: Human-Robot Navigation Data Collection and Accurate Motion Trajectories Dataset.IEEE Robotics and Automation Letters, 5(2):676–682, 2020
work page 2020
-
[33]
A. Rudenko, L. Palmieri, M. Herman, K. M. Kitani, D. M. Gavrila, and K. O. Arras. Human motion trajectory prediction: a survey.The International Journal of Robotics Research, 39(8):895–935, 2020
work page 2020
-
[34]
S. Saadatnejad, Y . Gao, H. Rezatofighi, and A. Alahi. JRDB-Traj: A dataset and benchmark for trajectory forecasting in crowds, 2023
work page 2023
-
[35]
A. Sadeghian, A. Alahi, and S. Savarese. Tracking the untrackable: Learning to track multiple cues with long-term dependencies.Pro- ceedings of the IEEE International Conference on Computer Vision (ICCV), pages 300–311, 2017
work page 2017
-
[36]
A. Sadeghian, V . Kosaraju, A. Sadeghian, N. Hirose, H. Rezatofighi, and S. Savarese. Sophie: An attentive gan for predicting paths compliant to social and physical constraints. InProceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2019
work page 2019
-
[37]
T. Salzmann, B. Ivanovic, P. Chakravarty, and M. Pavone. Tra- jectron++: Dynamically-feasible trajectory forecasting with heteroge- neous data. InProceedings of the European Conference on Computer Vision (ECCV), pages 683–700, 2020
work page 2020
-
[38]
T. Salzmann, L. Chiang, M. Ryll, D. Sadigh, C. Parada, and A. Bewley. Robots that can see: Leveraging human pose for trajectory prediction. IEEE Robotics and Automation Letters, 8(11):7090–7097, 2023
work page 2023
- [39]
-
[40]
T. Schreiter, T. Rodrigues de Almeida, Y . Zhu, E. Gutierrez Maestro, L. Morillo-Mendez, A. Rudenko, L. Palmieri, T. P. Kucner, M. Mag- nusson, and A. J. Lilienthal. TH ¨OR-MAGNI: A large-scale indoor motion capture recording of human movement and robot interaction. The International Journal of Robotics Research, 44(4):568–591, 2025
work page 2025
-
[41]
C. Sch ¨oller, V . Aravantinos, F. Lay, and A. Knoll. What the constant velocity model can teach us about pedestrian motion prediction.IEEE Robotics and Automation Letters, 5(2):1696–1703, 2020
work page 2020
-
[42]
P. T. Singamaneni, A. Favier, and R. Alami. Watch out! there may be a human. addressing invisible humans in social navigation. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 11344–11351, 2022
work page 2022
-
[43]
P. T. Singamaneni, P. Bachiller-Burgos, L. J. Manso, A. Garrell, A. Sanfeliu, A. Spalanzani, and R. Alami. A survey on socially aware robot navigation: Taxonomy and future challenges.The International Journal of Robotics Research, 0(0):02783649241230562, 2024
work page 2024
-
[44]
A. Stratton, K. Hauser, and C. Mavrogiannis. Characterizing the complexity of social robot navigation scenarios.IEEE Robotics and Automation Letters, 10(1):184–191, 2025
work page 2025
-
[45]
A. Stratton, P. T. Singamaneni, P. Goyal, R. Alami, and C. Mavro- giannis. How human motion prediction quality shapes social robot navigation performance in constrained spaces. InProceedings of the ACM/IEEE International Conference on Human-Robot Interaction (HRI), 2026
work page 2026
-
[46]
M. M. Sun, F. Baldini, K. Hughes, P. Trautman, and T. Murphey. Mixed strategy Nash equilibrium for crowd navigation.The Interna- tional Journal of Robotics Research, 44(7):1156–1185, 2025
work page 2025
-
[47]
P. Teja S. and R. Alami. HATEB-2: Reactive planning and decision making in human-robot co-navigation. InProceedings of the IEEE International Conference on Robot and Human Interactive Communi- cation (RO-MAN), pages 179–186, 2020
work page 2020
-
[48]
P. Teja Singamaneni, A. Favier, and R. Alami. Human-aware nav- igation planner for diverse human-robot interaction contexts. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 5817–5824, 2021
work page 2021
-
[49]
P. Trautman, J. Ma, R. M. Murray, and A. Krause. Robot navigation in dense human crowds: Statistical models and experimental studies of human-robot cooperation.International Journal of Robotics Research, 34(3):335–356, 2015
work page 2015
-
[50]
J. van den Berg, S. J. Guy, M. C. Lin, and D. Manocha. Reciprocal n-body collision avoidance. InProceedings of the International Symposium on Robotics Research (ISRR), pages 3–19, 2009
work page 2009
-
[51]
E. Vendrow, D. T. Le, J. Cai, and H. Rezatofighi. JRDB-Pose: A large-scale dataset for multi-person pose estimation and tracking. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2023
work page 2023
-
[52]
Walters.The Design Space for Robot Appearance and Behaviour for Social Robot Companions
M. Walters.The Design Space for Robot Appearance and Behaviour for Social Robot Companions. PhD thesis, University of Hertfordshire, Jan. 2008
work page 2008
-
[53]
A. Wang, D. Sato, Y . Corzo, S. Simkin, A. Biswas, and A. Steinfeld. Tbd pedestrian data collection: Towards rich, portable, and large-scale natural pedestrian data. InProceedings of the IEEE International Conference on Robotics and Automation (ICRA), pages 637–644, 2024
work page 2024
-
[54]
R. Wang, W. Wang, and B.-C. Min. Feedback-efficient active pref- erence learning for socially aware robot navigation. InProceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 11336–11343, 2022
work page 2022
-
[55]
G. Williams, A. Aldrich, and E. Theodorou. Model predictive path integral control: From theory to parallel computation.Journal of Guidance, Control, and Dynamics, 40:1–14, 01 2017
work page 2017
-
[56]
Z. Yan, T. Duckett, and N. Bellotto. Online learning for human classification in 3d lidar-based tracking. InProceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 864–871, 2017
work page 2017
-
[57]
M. S. Yasar, M. M. Islam, and T. Iqbal. Posetron: Enabling close- proximity human-robot collaboration through multi-human motion prediction. InProceedings of the ACM/IEEE International Conference on Human-Robot Interaction (HRI), page 830–839, 2024
work page 2024
- [58]
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.