Enabling Intelligent Bidirectional Charging: A Real-World Communication Interface Between Electric Vehicles, Charging Infrastructure, and a Control Optimizer
Pith reviewed 2026-05-20 17:20 UTC · model grok-4.3
The pith
A field-deployed system lets electric vehicles share state-of-charge data before plugging in to enable optimized bidirectional charging and grid load balancing.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The multi-level communication architecture integrates wireless OBD-II for pre-plug-in vehicle state-of-charge, a tablet for user preferences, and OCPP to connect the EV, charging station, and grid control center, allowing real-time data and optimization that achieves improved load balancing and robust vehicle-to-grid operation in field deployment.
What carries the argument
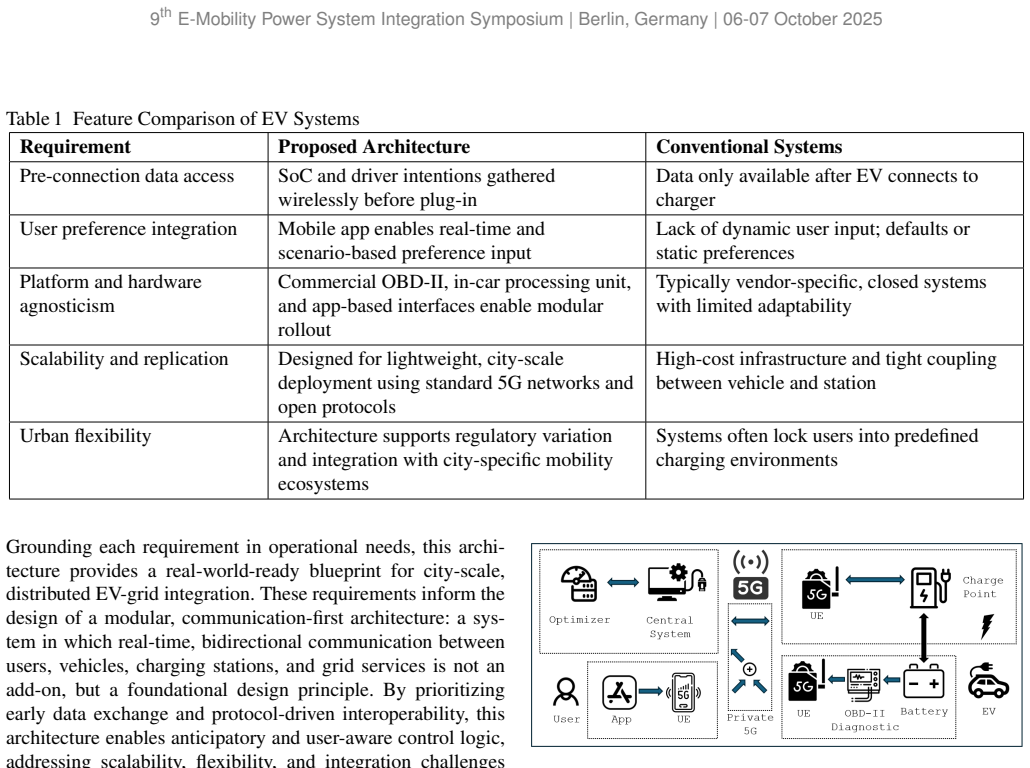
A multi-level communication architecture using the Open Charge Point Protocol (OCPP) that links the EV via wireless OBD-II and 5G middleware to the user interface, charging station, and centralized control optimizer for dynamic bidirectional decisions.
If this is right
- Early data acquisition before plug-in enables predictive control that improves overall system efficiency.
- Incorporation of user preferences such as departure time and energy demand supports personalized yet grid-aware charging.
- The architecture delivers measurable load balancing benefits during vehicle-to-grid operation in real urban settings.
- The deployment serves as a practical benchmark for positive energy districts and scalable urban e-mobility.
Where Pith is reading between the lines
- The same early-data approach could extend to fleets of commercial vehicles where departure schedules are known in advance.
- Testing the system under varying 5G network congestion would reveal whether the claimed robustness holds at larger scale.
- Linking the optimizer output directly to building energy management systems might further reduce peak grid demand.
Load-bearing premise
Real-time vehicle state-of-charge data obtained via wireless OBD-II before plug-in, together with user preferences and grid conditions, will arrive reliably and without significant latency to support beneficial dynamic charging and discharging decisions.
What would settle it
Repeated observations of delayed or missing wireless OBD-II state-of-charge data after plug-in that prevent the optimizer from completing charging or discharging adjustments before the user's departure time.
Figures



read the original abstract
This paper presents the real-world implementation and field validation of a user-aware bidirectional electric vehicle (EV) charging system developed within the Mobilities for EU and DymoBat projects in Dresden. Building on earlier simulation frameworks, the system enables transition from conceptual models to operational deployment in urban environments. To support grid flexibility and sustainable mobility, the solution combines real-time vehicle and user data with a centralized optimization platform to enable dynamic charging and discharging decisions. The architecture integrates a wireless On-Board Diagnostic II (OBD-II) interface and an open middleware node connected via a 5G campus network, allowing early access to vehicle state-of-charge before plug-in. A tablet-based interface captures user preferences such as departure time and energy demand, which are incorporated into the optimization together with grid conditions. A key contribution is a multi-level communication architecture linking the EV, charging station, user interface, and grid control center using the Open Charge Point Protocol (OCPP). The system integrates software, embedded hardware, and network communication for real-time charging management. Field deployment at Ostra Sport Park in Dresden demonstrates feasibility, improved load balancing, and robust vehicle-to-grid operation. The results show that early data acquisition and predictive control can enhance system efficiency. This work provides a practical benchmark for positive energy districts and future urban e-mobility systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript describes the real-world implementation and field validation of a bidirectional EV charging system developed under the Mobilities for EU and DymoBat projects. It integrates a wireless OBD-II interface for pre-plug-in state-of-charge acquisition, a tablet-based user interface for preferences (departure time and energy demand), and an OCPP-based multi-level communication architecture over a 5G campus network to link EVs, charging stations, and a centralized optimization platform. The system is deployed at Ostra Sport Park in Dresden, where the authors claim it demonstrates feasibility, improved load balancing, and robust vehicle-to-grid operation through early data acquisition and predictive control.
Significance. If the reported improvements were quantitatively validated, the work would provide a useful practical benchmark for positive energy districts and urban e-mobility systems by showing how simulation-derived concepts can be translated into operational bidirectional charging infrastructure. The emphasis on early vehicle data access and open-protocol integration is a constructive contribution to grid-flexibility research.
major comments (1)
- [Field deployment and results] Field deployment section: The central claim that the Ostra Sport Park deployment demonstrates 'improved load balancing' and 'enhanced system efficiency' is unsupported by any quantitative metrics (e.g., peak-shaving percentages, energy throughput, load-profile statistics, or baseline comparisons with/without the optimizer). Only qualitative statements appear, which prevents verification of the asserted benefits and renders the field-validation contribution unverifiable.
minor comments (2)
- [Abstract] The abstract and results description repeatedly state that 'results show enhancement' without specifying the measured quantities or providing even summary statistics; adding a concise table or figure with key performance indicators would strengthen clarity.
- The description of the multi-level communication architecture would benefit from a simple block diagram or explicit data-flow sequence to illustrate how OBD-II data, user inputs, and OCPP messages reach the optimizer.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address the major comment point by point below and will incorporate revisions to strengthen the quantitative support for our field validation claims.
read point-by-point responses
-
Referee: [Field deployment and results] Field deployment section: The central claim that the Ostra Sport Park deployment demonstrates 'improved load balancing' and 'enhanced system efficiency' is unsupported by any quantitative metrics (e.g., peak-shaving percentages, energy throughput, load-profile statistics, or baseline comparisons with/without the optimizer). Only qualitative statements appear, which prevents verification of the asserted benefits and renders the field-validation contribution unverifiable.
Authors: We agree that the current presentation relies on qualitative descriptions and that quantitative metrics would better substantiate the claims of improved load balancing and enhanced system efficiency. In the revised version, we will expand the Field deployment section with specific data collected during the Ostra Sport Park trials. This will include peak-shaving percentages, bidirectional energy throughput values, load-profile statistics, and direct comparisons of grid load with and without the optimization platform. These metrics were recorded in the experimental logs but were summarized only qualitatively in the initial submission; we will add a dedicated table and accompanying figure to present them clearly. revision: yes
Circularity Check
No significant circularity; derivation chain is absent and claims rest on direct field observations
full rationale
The manuscript is a system-integration and field-deployment report rather than a mathematical derivation. It describes hardware/software architecture, OCPP-based communication, wireless OBD-II data acquisition, and qualitative outcomes from the Ostra Sport Park deployment. No equations, optimization formulations, fitted parameters, or predictive models are presented that could reduce to their own inputs by construction. Mentions of 'earlier simulation frameworks' are contextual background and do not carry the load-bearing justification for the reported feasibility or load-balancing observations. The central claims therefore remain independent of any self-referential loop.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Wireless OBD-II and 5G campus network provide reliable early access to vehicle state-of-charge data before plug-in.
- domain assumption User preferences entered via tablet can be effectively incorporated into centralized charging optimization.
Reference graph
Works this paper leans on
-
[1]
J. Prata, E. Arsenio, and J. Pontes, “Moving towards the sustainable city: The role of electric vehicles, renew- able energy and energy efficiency,”WIT Transactions on Ecology and the Environment, vol. 179, pp. 871–883, 2013. 7 9th E-Mobility Power System Integration Symposium | Berlin, Germany | 06-07 October 2025
work page 2013
-
[2]
Bidi- rectional charging use cases: Innovations in e-mobility and power-grid flexibility,
S. Wang, J. A. Cabrera, and F. H. P. Fitzek, “Bidi- rectional charging use cases: Innovations in e-mobility and power-grid flexibility,” inIEEE International Smart Cities Conference (ISC2), Pattaya, Thailand, 2024, pp. 1–6
work page 2024
-
[3]
Simulation architecture for electric vehicle charging optimization in dresden ´s ostra district,
S. Wang, S. I. Haider, S. Shen, F. Motazedian, R. Radeke, and F. H. P. Fitzek, “Simulation architecture for electric vehicle charging optimization in dresden ´s ostra district,” inInternational Conference on Smart Cities and Green ICT Systems (SMARTGREENS), 2025, p. 56–65
work page 2025
-
[4]
“Dymobat research project,” 2025, available at https://dymobat.de/, Accessed: 22 July 2025
work page 2025
-
[5]
Electric vehicles for a flexible energy system: Challenges and opportunities,
S. Micari and G. Napoli, “Electric vehicles for a flexible energy system: Challenges and opportunities,”Energies, vol. 17, no. 22, p. 5614, 2024
work page 2024
-
[6]
Sus- tainable urban mobility plan 2025plus: An overview,
City of Dresden, Urban Development Division, “Sus- tainable urban mobility plan 2025plus: An overview,” Dresden, Germany, June 2016
work page 2016
-
[7]
Refined civitas process and impact evaluation framework,
D. Engels, G. V . D. Bergh, and T. Breemersch, “Refined civitas process and impact evaluation framework,” Pub- lic deliverable, CIVITAS SATELLITE Project, Euro- pean Commission, Brussels, Belgium, Tech. Rep. D2.3, August 2017, deliverable No.: D2.3, Grant Agreement No.: 713813, Work package No.: WP2
work page 2017
-
[8]
K. Rehman, O. Kipouridis, S. Karnouskos, O. Frendo, H. Dickel, J. Lipps, and N. Verzano, “A cloud-based development environment using hla and kubernetes for the co-simulation of a corporate electric vehicle fleet,” in2019 IEEE/SICE International Symposium on System Integration (SII). IEEE, 2019, pp. 47–54
work page 2019
-
[9]
“IEEE Standard for Modeling and Simulation (M&S) high level architecture (HLA)– object model template (omt) specification,”IEEE Std 1516.2-2010 (Revision of IEEE Std 1516.2-2000), 2010
work page 2010
-
[10]
Enabling sustainable urban mobility: The role of 5g communication in the mobilities for eu project,
S. Wang, C. Lehmann, R. Radeke, and F. H. P. Fitzek, “Enabling sustainable urban mobility: The role of 5g communication in the mobilities for eu project,” inIEEE International Smart Cities Conference (ISC2), Pattaya, Thailand, 2024, pp. 1–6
work page 2024
-
[11]
MobilitiesforEU, “Mobilities for eu,” https://mobilities- for.eu/, 2024, eU Horizon Project
work page 2024
-
[12]
Bridging the gap between past and future in re: a scenario-based approach,
P. Haumer, P. Heymans, M. Jarke, and K. Pohl, “Bridging the gap between past and future in re: a scenario-based approach,” inProceedings IEEE International Sympo- sium on Requirements Engineering (Cat. No. PR00188). IEEE, 1999, pp. 66–73
work page 1999
-
[13]
Sustainable rural electri- fication project management: An analysis of three case studies,
L. del Río Carazo, E. Acquila-Natale, S. Iglesias-Pradas, and Ángel Hernández-García, “Sustainable rural electri- fication project management: An analysis of three case studies,”Energies, vol. 15, no. 3, p. 1203, 2022
work page 2022
-
[14]
S. Wang, S. I. Haider, S. Shen, F. Motazedian, R. Radeke, and F. H. P. Fitzek, “From simulation to sustainable urban mobility: A purpose-driven framework for advanced ev charging technology transfer,” 2025, invited paper, sub- mitted to Proceedings of SMARTGREENS 2025 (Porto, Portugal: Springer LNCS/LNAI, 2025)
work page 2025
-
[15]
Remote electric vehicle battery monitoring and state of health estimation using telematics data,
C. Schellenberg, T. Filler, and et al., “Remote electric vehicle battery monitoring and state of health estimation using telematics data,”IEEE Transactions on Vehicular Technology, 2021
work page 2021
-
[16]
J. Nordholm, K. Westergren, and R. Johansson, “Integra- tion of electric vehicles into power grids—a review of commercial and research solutions for ev fleet manage- ment,”Energies, 2023
work page 2023
-
[17]
E. S. Catapult, “Project sciurus final report,” 2021, https://es.catapult.org.uk/news/project-sciurus-final- report/
work page 2021
-
[18]
Parker project: Final results and rec- ommendations,
P. P. Consortium, “Parker project: Final results and rec- ommendations,” 2020, https://parker-project.com/
work page 2020
-
[19]
Q. Wu, M. Shahidehpour, C. Li, S. Huang, W. Wei et al., “Transactive real-time electric vehicle charging management for commercial buildings with pv on-site generation,”IEEE Transactions on Smart Grid, vol. 10, no. 5, pp. 4939–4950, 2018. [20]ISO 15765-4: Road vehicles — Diagnostic communication over Controller Area Network (DoCAN) — Part 4: Requirements ...
work page 2018
-
[20]
Open charge point protocol (ocpp),
“Open charge point protocol (ocpp),” Open Charge Alliance, 2024. [Online]. Avail- able: https://openchargealliance.org/protocols/open- charge-point-protocol/
work page 2024
-
[21]
Message queuing telemetry transport (mqtt),
“Message queuing telemetry transport (mqtt),” OASIS,
- [22]
-
[23]
Authentication and autho- rization mechanism on message queue telemetry trans- port protocol,
Ö. Yerlikaya and G. Dalkılıc, “Authentication and autho- rization mechanism on message queue telemetry trans- port protocol,” in2018 3rd International Conference on Computer Science and Engineering (UBMK), 2018, pp. 145–150
work page 2018
-
[24]
Mobilities for eu - projektübersicht dresden,
Smart City Dresden, “Mobilities for eu - projektübersicht dresden,” https://smartcity.dresden.de/projekte/mobilities-for-eu, 2025, accessed: 22 July 2025
work page 2025
-
[25]
Data privacy and security concerns in iot- based traffic surveillance,
B. Mathew, “Data privacy and security concerns in iot- based traffic surveillance,” 2022
work page 2022
-
[26]
Standards and protocols for interoperability in smart ev systems,
S. Gupta, T. Varshney, P. Saini, and M. M. Hussain, “Standards and protocols for interoperability in smart ev systems,” inModern Computing Technologies for EV Efficiency and Sustainable Energy Integration. IGI Global Scientific Publishing, 2025, pp. 115–150
work page 2025
-
[27]
Drivers of vehicle-to-everything (v2x) adoption: A behavioral reasoning theory perspective,
I. Arpaci, M. A. Al-Sharafi, and M. A. Mahmoud, “Drivers of vehicle-to-everything (v2x) adoption: A behavioral reasoning theory perspective,”PloS one, vol. 20, no. 7, p. e0327084, 2025. 8
work page 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.