Reliable UAV Detection with ISAC
Pith reviewed 2026-05-25 03:19 UTC · model grok-4.3
The pith
Unmodified commercial 5G hardware detects small UAVs with sub-meter accuracy beyond 500 meters in strong clutter.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that reliable UAV detection with sub-meter accuracy is still possible in over 500 meters distance in a challenging radio environment rich of strong clutter when using unmodified commercial 5G hardware for mono-static OFDM radar, and that measured performance aligns with expectations from link budget and hardware impairment models.
What carries the argument
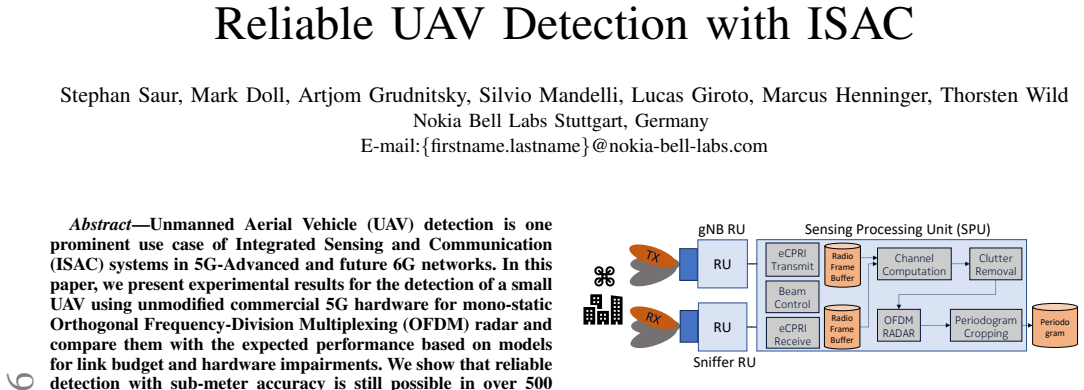
Mono-static Orthogonal Frequency-Division Multiplexing (OFDM) radar on commercial 5G hardware, which reuses the communication waveform for sensing while handling both functions simultaneously.
If this is right
- UAV detection becomes a practical use case for ISAC systems in 5G-Advanced and 6G without requiring new dedicated sensing hardware.
- Performance predictions from link budget and impairment models remain accurate enough to guide system design in cluttered settings.
- Sub-meter range accuracy is attainable at long range even when clutter returns are strong.
- Existing commercial base stations can support both communication and sensing tasks in the same spectrum.
Where Pith is reading between the lines
- Operators could deploy UAV monitoring as an overlay on current 5G infrastructure, lowering the cost of additional sensing services.
- The same approach might extend to detecting other low-altitude objects such as birds or drones in urban or rural settings.
- Further tests could examine how performance changes when multiple UAVs are present or when the UAV speed varies significantly.
Load-bearing premise
The chosen UAV flight path, speed, radar cross-section, and specific clutter environment are representative enough that the observed reliability generalizes beyond this single experiment.
What would settle it
A repeat experiment in a different clutter environment or with a UAV of different size and trajectory that fails to achieve sub-meter accuracy above 500 meters would falsify the central claim.
Figures





read the original abstract
Unmanned Aerial Vehicle (UAV) detection is one prominent use case of Integrated Sensing and Communication (ISAC) systems in 5G-Advanced and future 6G networks. In this paper, we present experimental results for the detection of a small UAV using unmodified commercial 5G hardware for mono-static Orthogonal Frequency-Division Multiplexing (OFDM) radar and compare them with the expected performance based on models for link budget and hardware impairments. We show that reliable detection with sub-meter accuracy is still possible in over 500 meters distance in a challenging radio environment rich of strong clutter.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents experimental results for mono-static OFDM radar-based detection of a small UAV using unmodified commercial 5G hardware. Measurements are compared against link-budget and hardware-impairment models, with the central claim that reliable detection achieving sub-meter accuracy remains feasible at ranges exceeding 500 m in a radio environment containing strong clutter.
Significance. If the experimental support is strengthened, the work would provide concrete evidence that existing 5G infrastructure can be repurposed for practical ISAC sensing of UAVs under realistic clutter conditions, directly informing 5G-Advanced and 6G system design.
major comments (2)
- [Results section] Results section (and abstract): the text states that measured results are compared to link-budget and impairment models but supplies no quantitative error metrics (e.g., range RMSE or detection-probability deviation), no count of independent trials or flight repetitions, and no statistical description of the clutter environment (e.g., clutter power distribution or RCS statistics). This absence prevents assessment of whether the reported sub-meter accuracy and reliability are robustly supported.
- [Abstract and results discussion] Abstract and results discussion: the headline claim of reliability 'in a challenging radio environment rich of strong clutter' rests on data from a single UAV flight path, speed, and RCS realization in one specific clutter scene. The manuscript does not provide evidence or analysis showing that this trajectory and environment are representative, nor does it quantify sensitivity to variations in multipath, RCS, or clutter statistics that would be needed to support generalization.
minor comments (1)
- Notation for range resolution and Doppler processing should be defined explicitly when first introduced, as the OFDM radar formulation is central to the comparison with models.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our experimental demonstration of UAV detection using commercial 5G hardware. We address each major comment below, indicating revisions where appropriate.
read point-by-point responses
-
Referee: [Results section] Results section (and abstract): the text states that measured results are compared to link-budget and impairment models but supplies no quantitative error metrics (e.g., range RMSE or detection-probability deviation), no count of independent trials or flight repetitions, and no statistical description of the clutter environment (e.g., clutter power distribution or RCS statistics). This absence prevents assessment of whether the reported sub-meter accuracy and reliability are robustly supported.
Authors: We agree that the manuscript would be strengthened by explicit quantitative metrics. In the revised version we will compute and report range RMSE between measured and model-predicted detections, state the exact number of independent flight repetitions performed, and add a statistical summary of the clutter environment (including empirical distributions of clutter power and estimated RCS values extracted from the recorded waveforms). revision: yes
-
Referee: [Abstract and results discussion] Abstract and results discussion: the headline claim of reliability 'in a challenging radio environment rich of strong clutter' rests on data from a single UAV flight path, speed, and RCS realization in one specific clutter scene. The manuscript does not provide evidence or analysis showing that this trajectory and environment are representative, nor does it quantify sensitivity to variations in multipath, RCS, or clutter statistics that would be needed to support generalization.
Authors: The reported measurements were obtained from a single but carefully selected flight trajectory through a dense urban clutter scene chosen to stress the system. We accept that this does not constitute a statistical survey across multiple environments. In the revision we will add an explicit limitations paragraph stating that the results constitute a proof-of-concept demonstration rather than a comprehensive sensitivity study, and we will refrain from claiming broad generalization without further data. revision: partial
- Full quantification of sensitivity to variations in multipath, RCS, and clutter statistics would require additional experimental campaigns that are outside the scope of the present study.
Circularity Check
No circularity: experimental measurements compared to independent models
full rationale
The paper reports direct experimental results from mono-static OFDM radar using unmodified commercial 5G hardware, with detection performance (sub-meter accuracy at >500 m) measured in a specific UAV trajectory and clutter environment. These are compared against separate models for link budget and hardware impairments that are not fitted to the presented data. No derivation chain, equation, or self-citation reduces the central claim to a fitted input or prior result by construction. The work is self-contained against external benchmarks (measured vs. modeled performance) and contains no load-bearing self-citations or ansatz smuggling.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
link budget model r* = (PTx M / Delta f * GTx GRx sigma c^2 / (4 pi)^3 f_c^2 * 1/(SN+I) * 1/gamma_min)^{1/4} with hardware terms (OIP3_Tx, IIP3_Rx, C_total=85 dB)
-
IndisputableMonolith/Foundation/AbsoluteFloorClosure.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
range-Doppler periodogram via batched FFT/iFFT on 10 ms radio frames; CRAP and ECA-C clutter suppression
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
A unified future: Integrated sensing and communication (ISAC) in 6G,
A. Ghoshet al., “A unified future: Integrated sensing and communication (ISAC) in 6G,”IEEE J. of Sel. Topics in Electromagn., Antennas and Propag., Aug. 2025
work page 2025
-
[2]
OFDM Radar Algorithms in Mobile Communication Networks,
K. M. Braun, “OFDM Radar Algorithms in Mobile Communication Networks,” Ph.D. dissertation, Karlsruher Institut f¨ur Technologie, 2014
work page 2014
-
[3]
3GPP-compliant radar cross section characterization of indoor factory targets,
A. W. Azim, A. Bazzi, R. Bomfin, and M. Chafii, “3GPP-compliant radar cross section characterization of indoor factory targets,”arXiv preprint arXiv: arXiv:2505.08754 [eess.SP], May 2025
-
[4]
J. Beuster et al., “Enhancing situational awareness in ISAC networks via drone swarms: A real-world channel sounding data set,” in2025 28th Int. Workshop Smart Antennas (WSA), Sept. 2025, pp. 170–173
work page 2025
-
[5]
R. Thom ¨a et al., “Distributed multisensor ISAC,”arXiv preprint arXiv:2511.13104 [eess.SP], Nov. 2025
-
[6]
Survey on integrated sensing and communication performance modeling and use cases feasibility,
S. Mandelli, M. Henninger, M. Bauhofer, and T. Wild, “Survey on integrated sensing and communication performance modeling and use cases feasibility,”2023 2nd Int. Conf. on 6G Netw. (6GNet), Nov. 2023
work page 2023
-
[7]
6G integrated sensing and communication: From vision to realization,
T. Wild, A. Grudnitsky, S. Mandelli, H. M., J. Guan, and F. Schaich, “6G integrated sensing and communication: From vision to realization,” in2023 20th European Radar Conference (EuRAD), 2023, pp. 355–358
work page 2023
-
[8]
NR; Physical channels and modulation,
3GPP, “NR; Physical channels and modulation,” Technical Sepcification (TS) 38.211, March 2026, version 19.3.0. [Online]. Available: https://www.3gpp.org/dynareport?code=38211
work page 2026
-
[9]
MUSIC, G-MUSIC, and maximum-likelihood performance breakdown,
B. A. Johnson, I. Abramovich, and X. Mestre, “MUSIC, G-MUSIC, and maximum-likelihood performance breakdown,”IEEE Trans. on Signal Process., vol. 56, no. 8, pp. 3944–3958, Aug. 2008
work page 2008
-
[10]
Full-duplex transceiver system calculations: Analysis of ADC and linearity challenges,
D. Korpi, T. Riihonen, V . Syrj ¨al¨a, L. Anttila, M. Valkama, and R. Wich- man, “Full-duplex transceiver system calculations: Analysis of ADC and linearity challenges,”IEEE Trans. on Wireless Commun., vol. 13, no. 7, pp. 3821–3836, Apr. 2014
work page 2014
-
[11]
ADMV4801: 24 GHz to 29.5 GHz Transmitter/Receiver, Single Polarization Beamformer,
Analog Devices, “ADMV4801: 24 GHz to 29.5 GHz Transmitter/Receiver, Single Polarization Beamformer,” Datasheet Rev.C, April 2022. [Online]. Available: https://www.analog.com/media/ en/technical-documentation/data-sheets/admv4801.pdf
work page 2022
-
[12]
Analyzing radar cross section signatures of diverse drone models at mmwave frequencies,
V . Semkin, J. Haarla, T. Pairon, C. Slezak, S. Rangan, and V . Viikari, “Analyzing radar cross section signatures of diverse drone models at mmwave frequencies,”IEEE Access, vol. 8, pp. 48 958–48 969, Mar. 2020
work page 2020
-
[13]
CRAP part II: Clutter removal with continuous acquisitions under phase noise,
M. Henninger, S. Mandelli, A. Grudnitsky, and S. ten Brink, “CRAP part II: Clutter removal with continuous acquisitions under phase noise,” in2024 Joint Eur . Conf. on Networks and Commun. & 6G Summit (EuCNC/6G Summit), Jun. 2024, pp. 416–421
work page 2024
-
[14]
Z. Zhao, X. Wan, Q. Shao, Z. Gong, and F. Cheng, “Multipath clutter rejection for digital radio mondiale-based HF passive bistatic radar with OFDM waveform,”IET Radar , Sonar & Navig., vol. 6, no. 9, pp. 867– 872, Dec. 2012
work page 2012
-
[15]
Target detection for ISAC with TDD transmission,
M. Henninger, L. Giroto, S. Saur, A. Grudnitsky, T. Wild, and S. Man- delli, “Target detection for ISAC with TDD transmission,” in2025 28th Int. Workshop on Smart Antennas (WSA), Sep. 2025
work page 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.