Learning regime-dependent governing equations: A symbolic decision tree approach
Pith reviewed 2026-06-30 14:14 UTC · model grok-4.3
The pith
Symbolic decision trees jointly learn regime partitions and local governing equations by solving a mixed-integer optimization problem.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
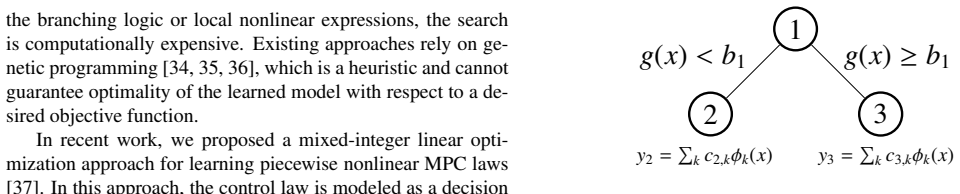
Symbolic decision trees identify physically interpretable regimes and local governing equations while improving predictive accuracy relative to approaches that learn a single global model or use existing decision tree models. The method simultaneously learns interpretable splitting conditions to partition the input domain and local governing equations that describe each regime. Both the splitting conditions and governing equations are parametrized using basis functions, resulting in a mixed-integer optimization learning problem.
What carries the argument
Symbolic decision trees that parametrize splitting conditions for regime partitions and local governing equations with basis functions and solve the resulting mixed-integer optimization problem.
If this is right
- The learned models support predictive modeling, optimization, and control in chemical engineering systems with regime switches.
- The partitions and equations recovered are physically interpretable.
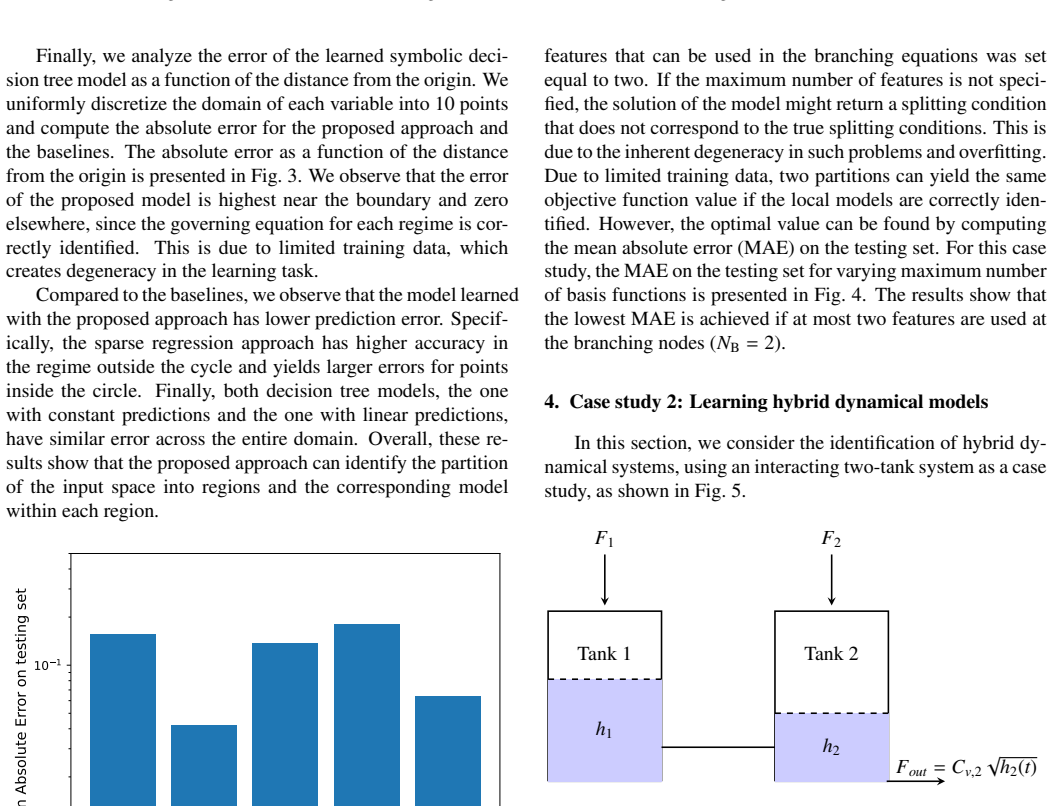
- The same procedure applies to learning hybrid dynamical models.
- The same procedure applies to learning constitutive equations such as zero-shear viscosity of polymer melts.
Where Pith is reading between the lines
- The framework could be tested on regime-switching data from domains outside chemical engineering where labeled regime data are scarce.
- Changing the choice or number of basis functions might allow the same optimization structure to handle qualitatively different regime transitions without altering the algorithm.
Load-bearing premise
Parametrizing both splitting conditions and local governing equations with basis functions yields a tractable mixed-integer optimization problem whose solution correctly recovers the underlying regime partitions and equations from data.
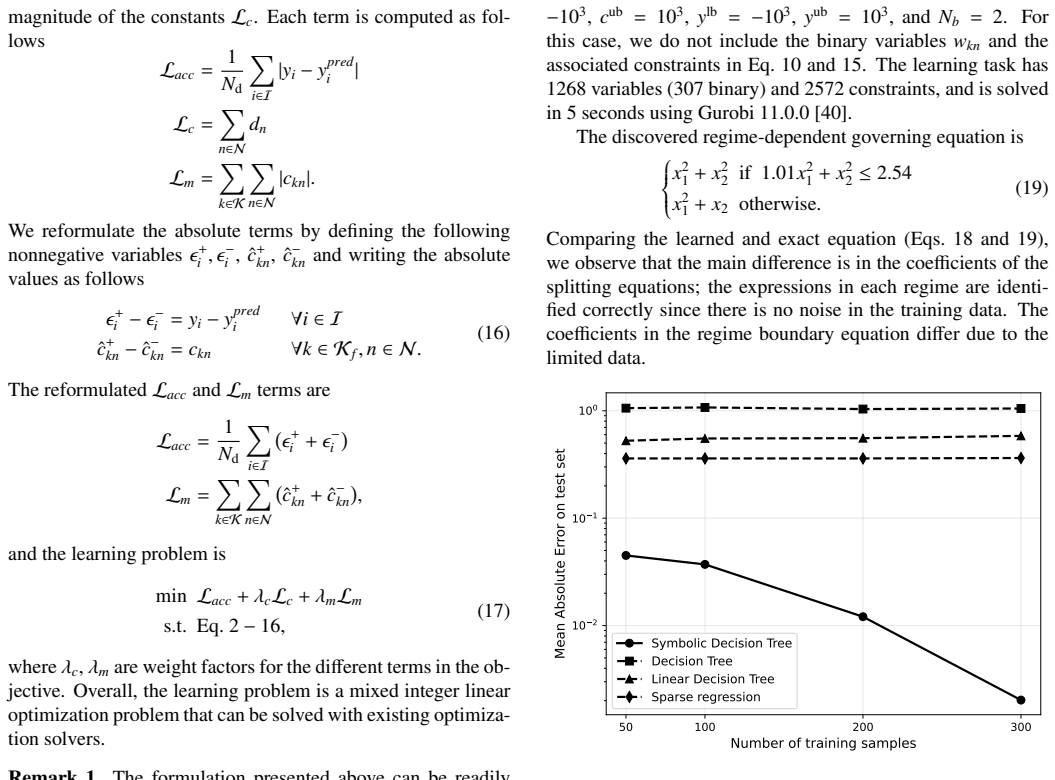
What would settle it
Apply the method to data generated from a known regime-switching system with documented boundaries and equations; the recovered partitions or equations should match the known structure or at least reduce prediction error below that of a single global model.
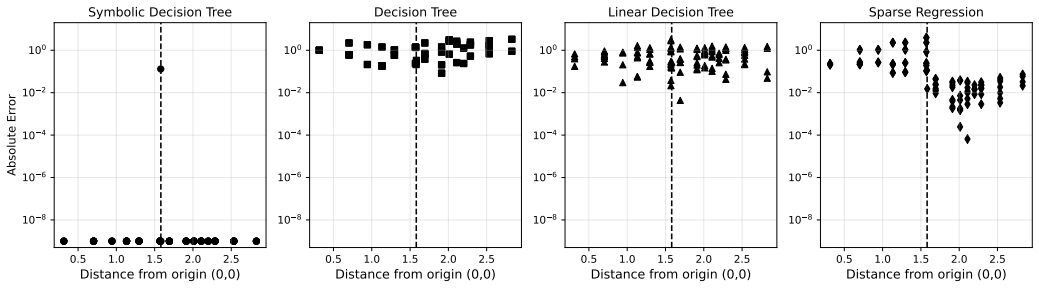
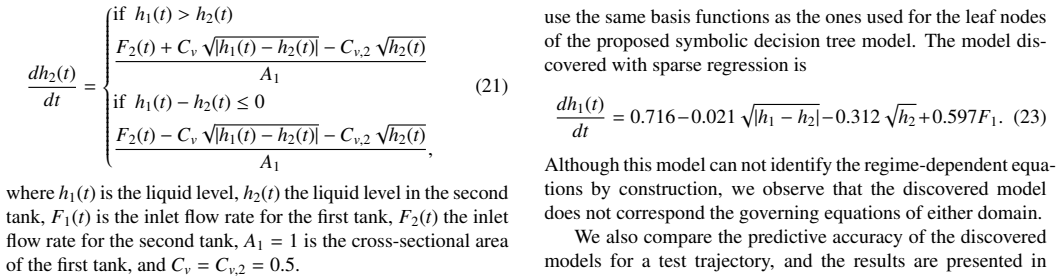
Figures
read the original abstract
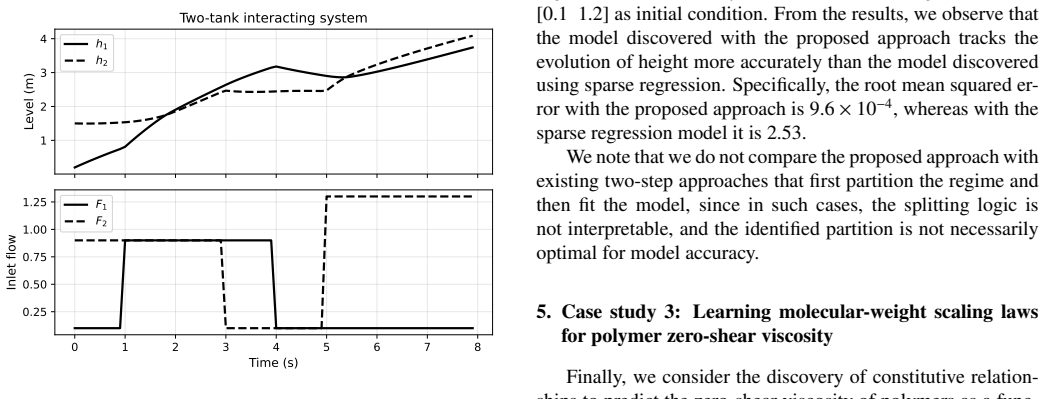
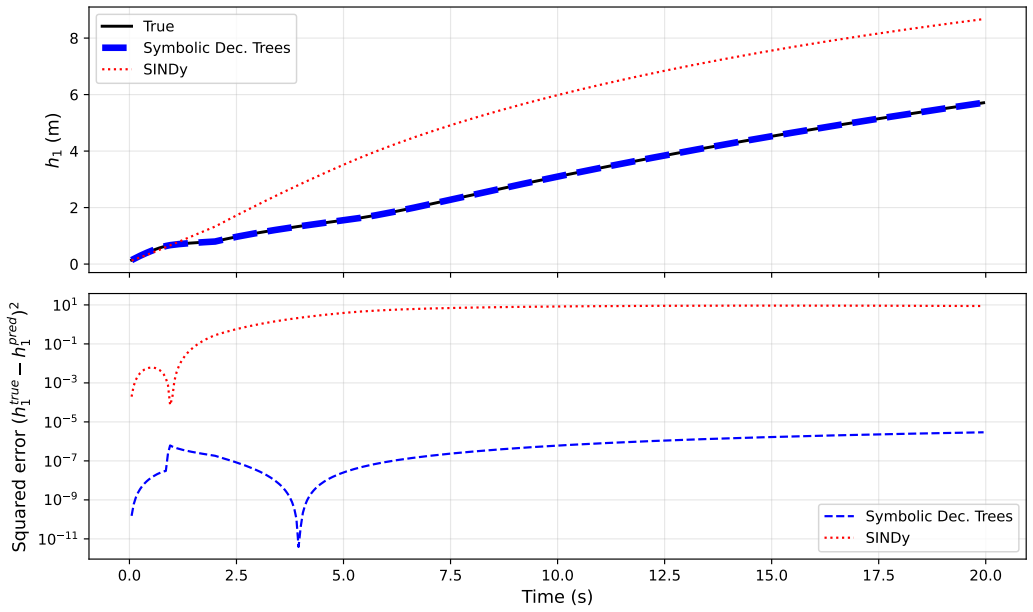
Many chemical engineering systems are governed by mechanisms that switch across operating regimes, making the data-driven discovery of regime-dependent governing equations essential for predictive modeling, optimization, and control. We propose symbolic decision trees for the data-driven discovery of regime-dependent governing equations. The method simultaneously learns interpretable splitting conditions to partition the input domain and local governing equations that describe each regime. To improve tractability, both the splitting conditions and governing equations are parametrized using basis functions, resulting in a mixed-integer optimization learning problem. We use the proposed approach to learn hybrid dynamical models and a constitutive equation for the zero-shear viscosity of polymer melts. Symbolic decision trees identify physically interpretable regimes and local governing equations while improving predictive accuracy relative to approaches that learn a single global model or use existing decision tree models. This framework provides an interpretable and generalizable route for discovering regime-dependent models in chemical engineering systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes symbolic decision trees to discover regime-dependent governing equations by simultaneously learning interpretable splitting conditions and local governing equations. Both are parametrized with basis functions to yield a mixed-integer optimization problem, which is applied to hybrid dynamical models and a constitutive equation for zero-shear viscosity of polymer melts. The central claim is that this identifies physically interpretable regimes, recovers local equations, and improves predictive accuracy over single global models or existing decision-tree approaches.
Significance. If the mixed-integer program reliably recovers the true regime partitions and equations, the framework would offer a practical, interpretable route to hybrid models for switching systems in chemical engineering, with direct relevance to modeling, optimization, and control. The basis-function parametrization for tractability and the concrete applications to dynamical systems and polymer rheology are strengths.
major comments (2)
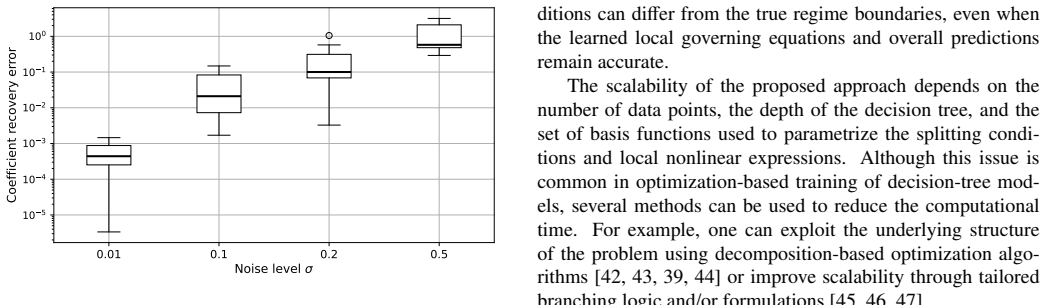
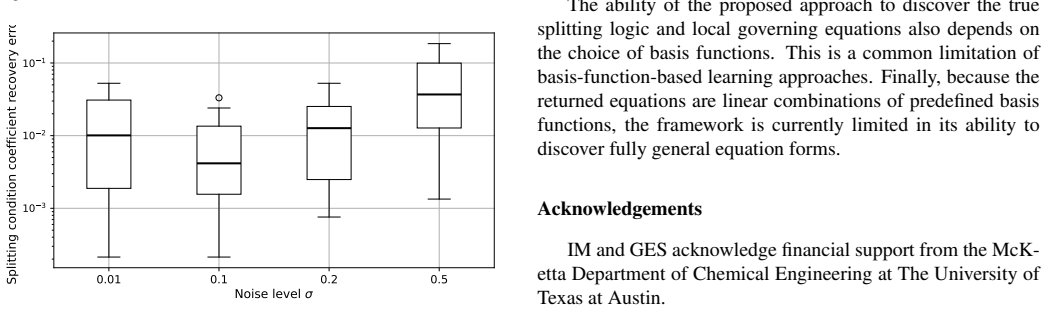
- [Methods and Results sections (formulation and validation)] The central claim requires that the mixed-integer program recovers the underlying physical regime boundaries and equations (not merely fits the data). The manuscript supplies no synthetic-data experiments with known ground-truth partitions, no recovery guarantees, and no analysis of multiple optima with comparable training loss; without these, improved predictive accuracy does not establish correct regime identification.
- [Methods (optimization formulation)] § on the mixed-integer formulation: the claim that parametrizing splits and local models with basis functions produces a tractable problem whose global solution recovers the regimes is load-bearing, yet no details on the exact MINLP, solver behavior, or sensitivity to initialization are provided to support that the recovered partitions are the physically correct ones rather than alternative partitions with similar loss.
minor comments (1)
- [Abstract and Results] The abstract states accuracy gains but supplies no quantitative error metrics, cross-validation details, or comparison baselines; these should be added to the results section for reproducibility.
Simulated Author's Rebuttal
We thank the referee for their constructive comments, which highlight important aspects of validating the method's ability to recover true regimes. We address each point below and will make revisions to strengthen the paper accordingly.
read point-by-point responses
-
Referee: [Methods and Results sections (formulation and validation)] The central claim requires that the mixed-integer program recovers the underlying physical regime boundaries and equations (not merely fits the data). The manuscript supplies no synthetic-data experiments with known ground-truth partitions, no recovery guarantees, and no analysis of multiple optima with comparable training loss; without these, improved predictive accuracy does not establish correct regime identification.
Authors: We agree that demonstrating recovery of known regimes on synthetic data would strengthen the central claim. The current manuscript focuses on real-world applications where the learned regimes are interpretable and align with physical understanding in hybrid systems and polymer rheology, and shows superior predictive accuracy. However, to directly address this, we will add synthetic experiments with ground-truth partitions in the revised version. We will also include an analysis of multiple local optima by reporting results from different initializations or solver settings to assess consistency of the recovered partitions. revision: yes
-
Referee: [Methods (optimization formulation)] § on the mixed-integer formulation: the claim that parametrizing splits and local models with basis functions produces a tractable problem whose global solution recovers the regimes is load-bearing, yet no details on the exact MINLP, solver behavior, or sensitivity to initialization are provided to support that the recovered partitions are the physically correct ones rather than alternative partitions with similar loss.
Authors: The manuscript presents the mixed-integer optimization formulation in the Methods section, where both splitting conditions and local models are parametrized with basis functions to enable tractability. We acknowledge that additional details on the specific MINLP structure, the solver employed, and empirical sensitivity to initialization would be beneficial. In the revision, we will expand this section to include the full mathematical formulation, solver information, and results from multiple optimization runs to demonstrate robustness and that the identified regimes are consistent rather than arbitrary alternatives with similar loss. revision: yes
Circularity Check
No circularity: standard optimization-based learning procedure
full rationale
The paper formulates symbolic decision trees as a mixed-integer program that parametrizes splitting conditions and local governing equations via basis functions, then solves for regime partitions and models from data. The claimed outputs (improved predictive accuracy and interpretable regimes) are the direct numerical results of this optimization rather than quantities defined by construction to equal the inputs. No self-citation chains, uniqueness theorems, or ansatzes are invoked in the provided abstract or description to justify core steps; the method is presented as an empirical discovery tool whose validity rests on solver performance and data fit, not on internal redefinition. This is a conventional data-driven modeling pipeline with no load-bearing reduction of predictions to fitted inputs.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Learning surrogate models for simulation-based optimization,
A. Cozad, N. V . Sahinidis, and D. C. Miller, “Learning surrogate models for simulation-based optimization,”AIChE J., vol. 60, no. 6, pp. 2211– 2227, 2014
2014
-
[2]
Discovering governing equations from data by sparse identification of nonlinear dynamical sys- tems,
S. L. Brunton, J. L. Proctor, and J. N. Kutz, “Discovering governing equations from data by sparse identification of nonlinear dynamical sys- tems,”Proceedings of the national academy of sciences, vol. 113, no. 15, pp. 3932–3937, 2016
2016
-
[3]
Data-driven identification of inter- pretable reduced-order models using sparse regression,
A. Narasingam and J. S.-I. Kwon, “Data-driven identification of inter- pretable reduced-order models using sparse regression,”Computers& Chemical Engineering, vol. 119, pp. 101–111, 2018
2018
-
[4]
Data-based modeling and control of nonlinear process systems using sparse identification: An overview of recent results,
F. Abdullah and P. D. Christofides, “Data-based modeling and control of nonlinear process systems using sparse identification: An overview of recent results,”Computers&Chemical Engineering, vol. 174, p. 108247, 2023
2023
-
[5]
Symantic: An efficient symbolic regression method for interpretable and parsimo- nious model discovery in science and beyond,
M. R. Muthyala, F. Sorourifar, Y . Peng, and J. A. Paulson, “Symantic: An efficient symbolic regression method for interpretable and parsimo- nious model discovery in science and beyond,”Industrial&Engineering Chemistry Research, vol. 64, no. 6, pp. 3354–3369, 2025
2025
-
[6]
Distilling free-form natural laws from exper- imental data,
M. Schmidt and H. Lipson, “Distilling free-form natural laws from exper- imental data,”Science, vol. 324, no. 5923, pp. 81–85, 2009
2009
-
[7]
A global minlp approach to symbolic re- gression,
A. Cozad and N. V . Sahinidis, “A global minlp approach to symbolic re- gression,”Mathematical Programming, vol. 170, no. 1, pp. 97–119, 2018
2018
-
[8]
Globally Optimal Symbolic Regression
V . Austel, S. Dash, O. Gunluk, L. Horesh, L. L, G. Nan- nicini, and B. Schieber, “Globally optimal symbolic regression,” https://arxiv.org/abs/1710.10720, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[9]
Learning symbolic expressions: Mixed-integer formulations, cuts, and heuristics,
J. Kim, S. Leyffer, and P. Balaprakash, “Learning symbolic expressions: Mixed-integer formulations, cuts, and heuristics,”INFORMS Journal on Computing, vol. 35, pp. 1383–1403, 2023. 8
2023
-
[10]
Perspectives on the integration be- tween first-principles and data-driven modeling,
W. Bradley, J. Kim, Z. Kilwein, L. Blakely, M. Eydenberg, J. Jalvin, C. Laird, and F. Boukouvala, “Perspectives on the integration be- tween first-principles and data-driven modeling,”Comput. Chem. Eng., p. 107898, 2022
2022
-
[11]
arXiv preprint arXiv:2011.03902 , year=
R. T. Chen, B. Amos, and M. Nickel, “Learning neural event functions for ordinary differential equations,”arXiv preprint arXiv:2011.03902, 2020
-
[12]
Neural hybrid automata: Learning dynamics with multiple modes and stochastic transitions,
M. Poli, S. Massaroli, L. Scimeca, S. Chun, S. J. Oh, A. Yamashita, H. Asama, J. Park, and A. Garg, “Neural hybrid automata: Learning dynamics with multiple modes and stochastic transitions,”Advances in Neural Information Processing Systems, vol. 34, pp. 9977–9989, 2021
2021
-
[13]
Industrial, large-scale model predictive control with structured neural networks,
P. Kumar, J. B. Rawlings, and S. J. Wright, “Industrial, large-scale model predictive control with structured neural networks,”Comput. Chem. Eng., vol. 150, p. 107291, 2021
2021
-
[14]
Learning an approx- imate model predictive controller with guarantees,
M. Hertneck, J. K ¨ohler, S. Trimpe, and F. Allg¨ower, “Learning an approx- imate model predictive controller with guarantees,”IEEE Control Syst. Lett., vol. 2, no. 3, pp. 543–548, 2018
2018
-
[15]
Learning for online mixed-integer model predictive control with parametric optimality cer- tificates,
L. Russo, S. H. Nair, L. Glielmo, and F. Borrelli, “Learning for online mixed-integer model predictive control with parametric optimality cer- tificates,”IEEE Control Systems Letters, vol. 7, pp. 2215 – 2220, 2023
2023
-
[16]
Deep learning-based embedded mixed-integer model predictive control,
B. Karg and S. Lucia, “Deep learning-based embedded mixed-integer model predictive control,” in2018 European Control Conference (ECC), pp. 2075–2080, IEEE, 2018
2075
-
[17]
PRISM: Re- current neural networks and presolve methods for fast mixed-integer opti- mal control,
A. Cauligi, A. Chakrabarty, S. Di Cairano, and R. Quirynen, “PRISM: Re- current neural networks and presolve methods for fast mixed-integer opti- mal control,” inLearning for Dynamics and Control Conference, pp. 34– 46, PMLR, 2022
2022
-
[18]
Identification of piecewise affine systems based on statistical clustering technique,
H. Nakada, K. Takaba, and T. Katayama, “Identification of piecewise affine systems based on statistical clustering technique,”Automatica, vol. 41, no. 5, pp. 905–913, 2005
2005
-
[19]
Model selection for hybrid dynamical systems via sparse regression,
N. M. Mangan, T. Askham, S. L. Brunton, J. N. Kutz, and J. L. Proctor, “Model selection for hybrid dynamical systems via sparse regression,” Proceedings of the Royal Society A: Mathematical, Physical and Engi- neering Sciences, vol. 475, no. 2223, 2019
2019
-
[20]
A clustering technique for the identification of piecewise affine systems,
G. Ferrari-Trecate, M. Muselli, D. Liberati, and M. Morari, “A clustering technique for the identification of piecewise affine systems,”Automatica, vol. 39, no. 2, pp. 205–217, 2003
2003
-
[21]
Identification of hybrid systems a tutorial,
S. Paoletti, A. L. Juloski, G. Ferrari-Trecate, and R. Vidal, “Identification of hybrid systems a tutorial,”European journal of control, vol. 13, no. 2- 3, pp. 242–260, 2007
2007
-
[22]
Identification of hybrid systems via mixed-integer programming,
A. Bemporad, J. Roll, and L. Ljung, “Identification of hybrid systems via mixed-integer programming,” inProceedings of the 40th IEEE Confer- ence on Decision and Control (Cat. No. 01CH37228), vol. 1, pp. 786– 792, IEEE, 2001
2001
-
[23]
Mathematical pro- gramming for piecewise linear regression analysis,
L. Yang, S. Liu, S. Tsoka, and L. G. Papageorgiou, “Mathematical pro- gramming for piecewise linear regression analysis,”Expert systems with applications, vol. 44, pp. 156–167, 2016
2016
-
[24]
Breiman, J
L. Breiman, J. Friedman, R. A. Olshen, and C. J. Stone,Classification and regression trees. Chapman and Hall/CRC, 2017
2017
-
[25]
Learning with continuous classes,
J. R. Quinlanet al., “Learning with continuous classes,” in5th Australian joint conference on artificial intelligence, vol. 92, pp. 343–348, World Scientific, 1992
1992
-
[26]
Near-optimal nonlinear regression trees,
D. Bertsimas, J. Dunn, and Y . Wang, “Near-optimal nonlinear regression trees,”Operations Research Letters, vol. 49, no. 2, pp. 201–206, 2021
2021
-
[27]
Approximate model predictive building control via machine learning,
J. Drgo ˇna, D. Picard, M. Kvasnica, and L. Helsen, “Approximate model predictive building control via machine learning,”Applied energy, vol. 218, pp. 199–216, 2018
2018
-
[28]
Building temper- ature control by simple mpc-like feedback laws learned from closed-loop data,
M. Klau ˇco, J. Drgoˇna, M. Kvasnica, and S. Di Cairano, “Building temper- ature control by simple mpc-like feedback laws learned from closed-loop data,”IFAC Proceedings Volumes, vol. 47, no. 3, pp. 581–586, 2014
2014
-
[29]
Learning ap- proximate semi-explicit hybrid mpc with an application to microgrids,
D. Masti, T. Pippia, A. Bemporad, and B. De Schutter, “Learning ap- proximate semi-explicit hybrid mpc with an application to microgrids,” IFAC-PapersOnLine, vol. 53, no. 2, pp. 5207–5212, 2020
2020
-
[30]
A piecewise linear regression and classification algorithm with application to learning and model predictive control of hybrid sys- tems,
A. Bemporad, “A piecewise linear regression and classification algorithm with application to learning and model predictive control of hybrid sys- tems,”IEEE Transactions on Automatic Control, vol. 68, no. 6, pp. 3194– 3209, 2022
2022
-
[31]
Piecewise linear trees as surrogate models for system design and planning under high-frequency temporal variabil- ity,
Y . Wu and C. T. Maravelias, “Piecewise linear trees as surrogate models for system design and planning under high-frequency temporal variabil- ity,”European Journal of Operational Research, vol. 315, no. 2, pp. 541– 552, 2024
2024
-
[32]
Hyperplane decision trees as piecewise linear surrogate models for chemical process design,
E. M. Sunshine, C. C. Tedesco, S. A. Akhade, M. J. McNenly, J. R. Kitchin, and C. D. Laird, “Hyperplane decision trees as piecewise linear surrogate models for chemical process design,”Computers&Chemical Engineering, vol. 202, p. 109204, 2025
2025
-
[33]
Learning symbolic representations of hybrid dynamical systems,
D. L. Ly and H. Lipson, “Learning symbolic representations of hybrid dynamical systems,”The Journal of Machine Learning Research, vol. 13, no. 1, pp. 3585–3618, 2012
2012
-
[34]
Ps-tree: A piecewise sym- bolic regression tree,
H. Zhang, A. Zhou, H. Qian, and H. Zhang, “Ps-tree: A piecewise sym- bolic regression tree,”Swarm and Evolutionary Computation, vol. 71, p. 101061, 2022
2022
-
[35]
Identification of hybrid systems with dynamics-based modeling through symbolic regression,
S. Plambeck, M. Schmidt, A. Subias, L. Trav ´e-Massuy`es, and G. Fey, “Identification of hybrid systems with dynamics-based modeling through symbolic regression,”Journal of Systems and Software, p. 112639, 2025
2025
-
[36]
Symbolic regression enhanced decision trees for classification tasks,
K. S. Fong and M. Motani, “Symbolic regression enhanced decision trees for classification tasks,” inProceedings of the AAAI Conference on Arti- ficial Intelligence, vol. 38, pp. 12033–12042, 2024
2024
-
[37]
I. Mitrai, “Discovering interpretable piecewise nonlinear model pre- dictive control laws via symbolic decision trees,”arXiv preprint arXiv:2510.10411, 2025
-
[38]
Optimal classification trees,
D. Bertsimas and J. Dunn, “Optimal classification trees,”Machine Learn- ing, vol. 106, no. 7, pp. 1039–1082, 2017
2017
-
[39]
Strong optimal classification trees,
S. Aghaei, A. G ´omez, and P. Vayanos, “Strong optimal classification trees,”Operations Research, vol. 73, no. 4, pp. 2223–2241, 2025
2025
-
[40]
Gurobi Optimizer Reference Manual,
Gurobi Optimization, LLC, “Gurobi Optimizer Reference Manual,” 2021. Accessed: 2023-08-31
2021
-
[41]
Scikit-learn: Machine learning in Python,
F. Pedregosa, G. Varoquaux, A. Gramfort, V . Michel, B. Thirion, O. Grisel, M. Blondel, P. Prettenhofer, R. Weiss, V . Dubourg, J. Van- derplas, A. Passos, D. Cournapeau, M. Brucher, M. Perrot, and E. Duch- esnay, “Scikit-learn: Machine learning in Python,”Journal of Machine Learning Research, vol. 12, pp. 2825–2830, 2011
2011
-
[42]
Col- umn generation based heuristic for learning classification trees,
M. Firat, G. Crognier, A. F. Gabor, C. A. Hurkens, and Y . Zhang, “Col- umn generation based heuristic for learning classification trees,”Comput- ers&Operations Research, vol. 116, p. 104866, 2020
2020
-
[43]
An improved column- generation-based matheuristic for learning classification trees,
K. K. Patel, G. Desaulniers, and A. Lodi, “An improved column- generation-based matheuristic for learning classification trees,”Comput- ers&Operations Research, vol. 165, p. 106579, 2024
2024
-
[44]
Acceleration techniques for learning optimal classification trees with integer program- ming,
M. Keegan, M. Forbes, P. Corry, and M. Abolghasemi, “Acceleration techniques for learning optimal classification trees with integer program- ming,”arXiv preprint arXiv:2511.18791, 2025
-
[45]
Quant-bnb: A scalable branch- and-bound method for optimal decision trees with continuous features,
R. Mazumder, X. Meng, and H. Wang, “Quant-bnb: A scalable branch- and-bound method for optimal decision trees with continuous features,” inInternational Conference on Machine Learning, pp. 15255–15277, PMLR, 2022
2022
-
[46]
A scalable deterministic global optimization algorithm for training optimal decision tree,
K. Hua, J. Ren, and Y . Cao, “A scalable deterministic global optimization algorithm for training optimal decision tree,”Advances in Neural Infor- mation Processing Systems, vol. 35, pp. 8347–8359, 2022
2022
-
[47]
Rs-ort: A reduced-space branch-and-bound algorithm for optimal regression trees,
C. Heredia, P. Chumpitaz-Flores, and K. Hua, “Rs-ort: A reduced-space branch-and-bound algorithm for optimal regression trees,”arXiv preprint arXiv:2510.23901, 2025. 9
discussion (0)
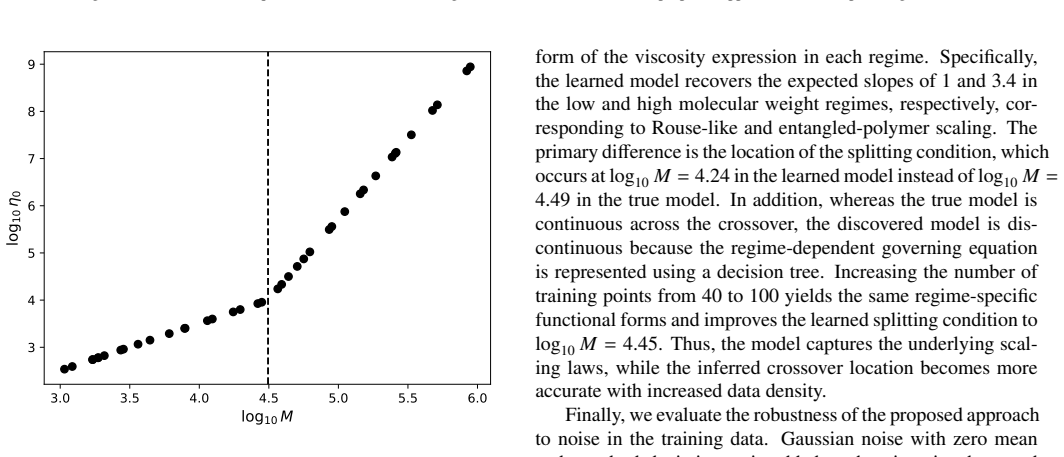
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.