A Surveillance Evasion Game with Continuous Sensor Redeployment via Bilevel Optimization
Pith reviewed 2026-06-29 12:05 UTC · model grok-4.3
The pith
Sensors reposition continuously along building edges to reach a local Nash equilibrium against an evading drone.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By alternating between computing the attacker's minimum-detection trajectory and updating sensor positions via bilevel optimization, with first-order stationarity conditions derived analytically for both sides, the joint strategy converges to a Local Nash Equilibrium. This equilibrium supplies a concrete baseline configuration for heterogeneous sensor networks tasked with protecting airspace around critical infrastructure.
What carries the argument
Alternating bilevel optimization that treats continuous sensor placement along convex boundaries as the upper level and the attacker's trajectory as the lower level, enabled by a log-sum-exp smooth approximation of the polygon constraints.
If this is right
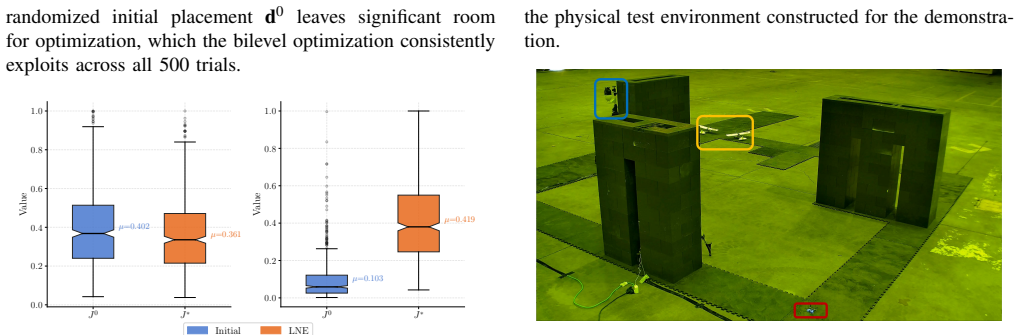
- Sensor networks can be redeployed in continuous rather than discrete locations along building perimeters.
- Heterogeneous mixtures of directional and omnidirectional sensors are handled within the same optimization.
- The method supplies an explicit, computable equilibrium strategy usable as a baseline for counter-UAS planning.
- Analytical stationarity conditions allow direct use of off-the-shelf gradient solvers without combinatorial search over placements.
Where Pith is reading between the lines
- The same bilevel structure could be extended to non-convex or time-varying building geometries if a suitable smooth boundary representation is substituted.
- Periodic re-optimization during an actual intrusion would turn the static equilibrium into a feedback policy.
- Adding a second intruder would require only a modest change to the lower-level trajectory planner while keeping the upper-level sensor update unchanged.
Load-bearing premise
The log-sum-exp approximation remains sufficiently accurate and differentiable at the polygon vertices so that gradient-based solvers can reliably move the sensors.
What would settle it
Run the converged sensor positions against the attacker's independently recomputed best-response trajectory and check whether either player can unilaterally improve its payoff.
Figures

read the original abstract
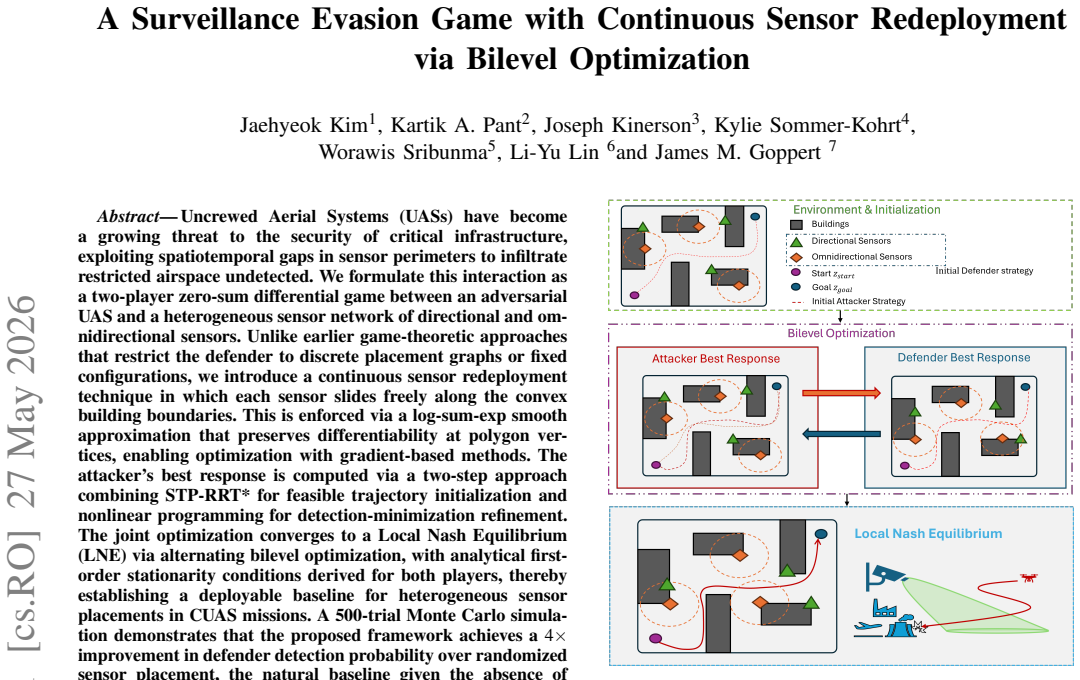
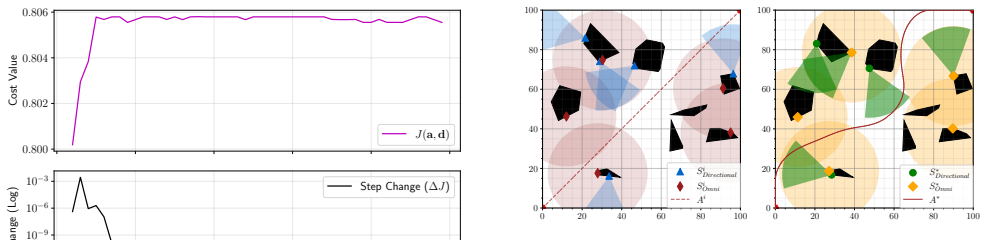
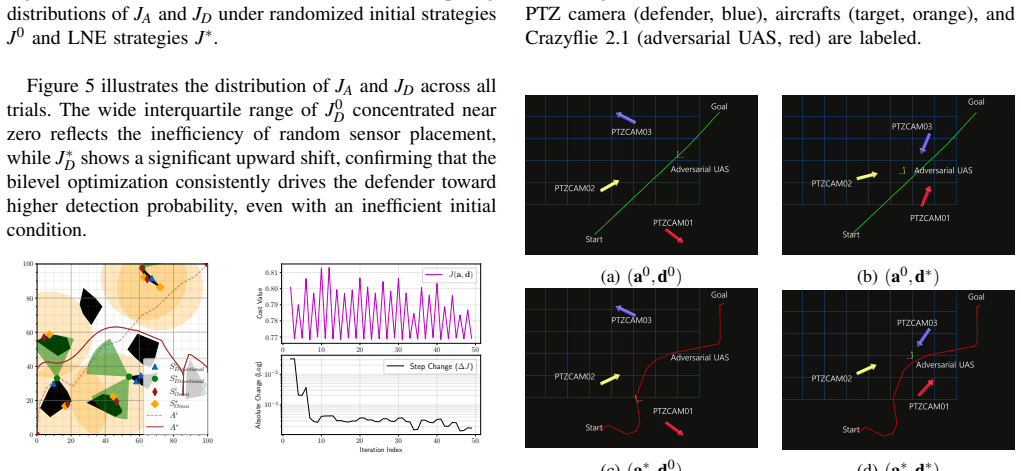
Uncrewed Aerial Systems (UASs) have become a growing threat to the security of critical infrastructure, exploiting spatiotemporal gaps in sensor perimeters to infiltrate restricted airspace undetected. We formulate this interaction as a two-player zero-sum differential game between an adversarial UAS and a heterogeneous sensor network of directional and omnidirectional sensors. Unlike earlier game-theoretic approaches that restrict the defender to discrete placement graphs or fixed configurations, we introduce a continuous sensor redeployment technique in which each sensor slides freely along the convex building boundaries. This is enforced via a log-sum-exp smooth approximation that preserves differentiability at polygon vertices, enabling optimization with gradient-based methods. The attacker's best response is computed via a two-step approach combining STP-RRT* for feasible trajectory initialization and nonlinear programming for detection-minimization refinement. The joint optimization converges to a Local Nash Equilibrium (LNE) via alternating bilevel optimization, with analytical first-order stationarity conditions derived for both players, thereby establishing a deployable baseline for heterogeneous sensor placements in CUAS missions.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper formulates a surveillance evasion interaction as a two-player zero-sum differential game between an adversarial UAS and a heterogeneous network of directional and omnidirectional sensors. It proposes continuous sensor redeployment along convex building boundaries enforced by a log-sum-exp smooth approximation to enable gradient-based optimization, computes the attacker's best response via STP-RRT* initialization followed by nonlinear programming refinement, and solves the joint problem via alternating bilevel optimization that is asserted to converge to a local Nash equilibrium, with analytical first-order stationarity conditions derived for each player.
Significance. If the claimed convergence to a joint LNE and the stationarity conditions can be rigorously established, the work would advance game-theoretic approaches to counter-UAS sensor placement by moving from discrete graphs to continuous redeployment, providing a practical baseline for heterogeneous sensor configurations in security applications.
major comments (2)
- [Abstract] Abstract: The central claim that 'the joint optimization converges to a Local Nash Equilibrium (LNE) via alternating bilevel optimization' with 'analytical first-order stationarity conditions derived for both players' is unsupported by any derivation, convergence analysis, or verification that the alternating procedure reaches a fixed point satisfying both stationarity conditions simultaneously. In non-convex continuous games this alternation can cycle or terminate at points permitting profitable unilateral deviation, directly undermining the LNE assertion.
- [Abstract] Abstract: No error analysis, numerical verification, or explicit stationarity equations are supplied to substantiate the asserted convergence and stationarity conditions, rendering the soundness of the bilevel procedure impossible to assess from the given material.
Simulated Author's Rebuttal
We thank the referee for their thorough review and constructive criticism. We respond to each major comment below and indicate the revisions we plan to make.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim that 'the joint optimization converges to a Local Nash Equilibrium (LNE) via alternating bilevel optimization' with 'analytical first-order stationarity conditions derived for both players' is unsupported by any derivation, convergence analysis, or verification that the alternating procedure reaches a fixed point satisfying both stationarity conditions simultaneously. In non-convex continuous games this alternation can cycle or terminate at points permitting profitable unilateral deviation, directly undermining the LNE assertion.
Authors: The first-order stationarity conditions are analytically derived for the attacker in the trajectory optimization problem and for the defender in the sensor redeployment problem, as detailed in the manuscript. The alternating procedure is presented as converging to a local Nash equilibrium by iteratively computing best responses until a fixed point is reached. We agree that no formal convergence analysis is provided to guarantee that the alternation always terminates at such a point without cycling, which is a valid concern in non-convex games. We will revise the abstract to remove the unsubstantiated claim of convergence and instead state that the procedure computes strategies satisfying the derived stationarity conditions. revision: yes
-
Referee: [Abstract] Abstract: No error analysis, numerical verification, or explicit stationarity equations are supplied to substantiate the asserted convergence and stationarity conditions, rendering the soundness of the bilevel procedure impossible to assess from the given material.
Authors: Explicit stationarity equations and numerical examples demonstrating the procedure are included in the body of the manuscript. However, to make the abstract self-contained and substantiate the claims, we will add a reference to the sections containing the derivations and include a short note on the observed numerical behavior. No error analysis on the approximation is currently provided, and we will consider adding a brief discussion if space permits. revision: partial
- Rigorous proof of convergence for the alternating bilevel optimization to a local Nash equilibrium.
Circularity Check
No significant circularity; derivation is algorithmic and self-contained
full rationale
The abstract and available text describe an algorithmic construction: continuous sensor redeployment via log-sum-exp approximation, attacker best-response via STP-RRT* + NLP, and alternating bilevel optimization to a claimed LNE with separately derived stationarity conditions. No equations, parameters, or self-citations are shown that reduce any claimed result to its own inputs by definition or fitting. The central claim rests on the alternating procedure reaching a joint fixed point, but this is presented as a computational outcome rather than a self-referential definition or renamed fit. No load-bearing self-citation chains or ansatz smuggling appear. This is the expected honest non-finding for a methods paper whose steps are externally verifiable via implementation.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Investigation into unmanned aircraft system incidents in the national airspace system,
R. S. Sharma, “Investigation into unmanned aircraft system incidents in the national airspace system,”International Journal of Aviation, Aeronautics, and Aerospace, vol. 3, no. 4, p. 2, 2016
2016
-
[2]
Non-cooperative wi-fi localization & its privacy implications,
A. Abedi and D. Vasisht, “Non-cooperative wi-fi localization & its privacy implications,” inProceedings of the 28th Annual International Conference On Mobile Computing And Networking, 2022
2022
-
[3]
Protecting privacy from aerial photography: State of the art, opportunities, and challenges,
B. Jiang, J. Yang, and H. Song, “Protecting privacy from aerial photography: State of the art, opportunities, and challenges,” inIEEE INFOCOM 2020-IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), IEEE, 2020
2020
-
[4]
Optimal camera placement for automated surveillance tasks,
R. Bodoret al., “Optimal camera placement for automated surveillance tasks,”Journal of Intelligent and Robotic Systems, vol. 50, no. 3, pp. 257–295, 2007
2007
-
[5]
A. A. Steinitz,Optimal camera placement. PhD thesis, University of California, Berkeley, 2012
2012
-
[6]
A game-theoretic framework for security-aware sensor placement problem in networked control systems,
M. Piraniet al., “A game-theoretic framework for security-aware sensor placement problem in networked control systems,”IEEE Trans- actions on Automatic Control, vol. 67, no. 7, pp. 3699–3706, 2021
2021
-
[7]
Review of 20 years of range sensor development,
F. Blais, “Review of 20 years of range sensor development,”Journal of Electronic Imaging, vol. 13, no. 1, pp. 231–243, 2004
2004
-
[8]
Stealthy optimal range-sensor placement for target localization,
M. H. Y . Nooshabadi, R. Sipahi, and L. Lessard, “Stealthy optimal range-sensor placement for target localization,”IEEE Control Systems Letters, 2024
2024
-
[9]
Optimal placement of omnidirectional sensors in a transportation network for effective emergency response and crash characterization,
T. Geetlaet al., “Optimal placement of omnidirectional sensors in a transportation network for effective emergency response and crash characterization,”Transportation Research Part C: Emerging Tech- nologies, vol. 45, pp. 64–82, 2014
2014
-
[10]
Ogas: Omni-directional glider assisted scheme for autonomous deployment of sensor nodes in open area wireless sensor network,
V . Sharmaet al., “Ogas: Omni-directional glider assisted scheme for autonomous deployment of sensor nodes in open area wireless sensor network,”ISA Transactions, vol. 132, pp. 131–145, 2023
2023
-
[11]
Failure-resilient coverage maxi- mization with multiple robots,
M. Ishat-E-Rabban and P. Tokekar, “Failure-resilient coverage maxi- mization with multiple robots,”IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 3894–3901, 2021
2021
-
[12]
On optimal pursuit trajectories for visibility-based target-tracking game,
R. Zou and S. Bhattacharya, “On optimal pursuit trajectories for visibility-based target-tracking game,”IEEE Transactions on Robotics, vol. 35, no. 2, pp. 449–465, 2018
2018
-
[13]
Efficient iterative linear-quadratic approximations for nonlinear multi-player general-sum differential games,
D. Fridovich-Keil, E. Ratner, L. Peters, A. D. Dragan, and C. J. Tom- lin, “Efficient iterative linear-quadratic approximations for nonlinear multi-player general-sum differential games,” in2020 IEEE Interna- tional Conference on Robotics and Automation (ICRA), pp. 1475– 1481, IEEE, 2020
2020
-
[14]
Cooperative team strategies for multi-player perimeter-defense games,
D. Shishika, J. Paulos, and V . Kumar, “Cooperative team strategies for multi-player perimeter-defense games,”IEEE Robotics and Automa- tion Letters, vol. 5, no. 2, pp. 2738–2745, 2020
2020
-
[15]
Local-game decomposition for multiplayer perimeter-defense problem,
D. Shishika and V . Kumar, “Local-game decomposition for multiplayer perimeter-defense problem,” inIEEE Conference on Decision and Control (CDC), pp. 2093–2100, 2018
2093
-
[16]
Time-dependent surveillance-evasion games,
E. Carteeet al., “Time-dependent surveillance-evasion games,” in2019 IEEE 58th Conference on Decision and Control (CDC), IEEE, 2019
2019
-
[17]
Adaptive partitioning for coordinated multi-agent perimeter defense,
D. G. Macharet, A. K. Chen, D. Shishika, G. J. Pappas, and V . Kumar, “Adaptive partitioning for coordinated multi-agent perimeter defense,” inIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 7971–7977, 2020
2020
-
[18]
Multivehicle perimeter defense in conical environments,
S. Bajaj, S. D. Bopardikar, E. Torng, A. V on Moll, and D. W. Casbeer, “Multivehicle perimeter defense in conical environments,” IEEE Transactions on Robotics, vol. 40, pp. 1439–1456, 2024
2024
-
[19]
A surveillance evasion framework for counter-uas missions: an attacker-centric perspective,
J. Kim, K. A. Pant, K. S. Sommer-Kohrt, J. R. Kinerson, and J. M. Goppert, “A surveillance evasion framework for counter-uas missions: an attacker-centric perspective,” in2025 25th International Conference on Control, Automation and Systems (ICCAS), pp. 1153–1158, IEEE, 2025
2025
-
[20]
Game tree search for minimizing detectability and maximizing visi- bility,
Z. Zhang, J. M. Smereka, J. Lee, L. Zhou, Y . Sung, and P. Tokekar, “Game tree search for minimizing detectability and maximizing visi- bility,”Autonomous Robots, vol. 45, pp. 283–297, 2021
2021
-
[21]
Large-scale optimal sensor array management for multitarget tracking,
R. Tharmarasa, T. Kirubarajan, and M. Hernandez, “Large-scale optimal sensor array management for multitarget tracking,”IEEE Transactions on Systems, Man, and Cybernetics, Part C (Applications and Reviews), vol. 37, no. 5, pp. 803–814, 2007
2007
-
[22]
Nonconvex min-max optimization: Appli- cations, challenges, and recent theoretical advances,
M. Razaviyaynet al., “Nonconvex min-max optimization: Appli- cations, challenges, and recent theoretical advances,”IEEE Signal Processing Magazine, vol. 37, no. 5, pp. 55–66, 2020
2020
-
[23]
What is local optimality in nonconvex-nonconcave minimax optimization?,
C. Jin, P. Netrapalli, and M. Jordan, “What is local optimality in nonconvex-nonconcave minimax optimization?,” inInternational Conference on Machine Learning, PMLR, 2020
2020
-
[24]
Deep fictitious play for games with continuous action spaces,
N. Kamraet al., “Deep fictitious play for games with continuous action spaces,” inProceedings of the 18th International Conference on Autonomous Agents and MultiAgent Systems, 2019
2019
-
[25]
On the characterization of local nash equilibria in continuous games,
L. J. Ratliff, S. A. Burden, and S. S. Sastry, “On the characterization of local nash equilibria in continuous games,”IEEE Transactions on Automatic Control, vol. 61, no. 8, pp. 2301–2307, 2016
2016
-
[26]
Hamilton-jacobi reachability: A brief overview and recent advances,
S. Bansal, M. Chen, S. Herbert, and C. J. Tomlin, “Hamilton-jacobi reachability: A brief overview and recent advances,” in2017 IEEE 56th annual conference on decision and control (CDC), pp. 2242– 2253, IEEE, 2017
2017
-
[27]
Hamilton–jacobi reachability: Some recent theoretical advances and applications in unmanned airspace management,
M. Chen and C. J. Tomlin, “Hamilton–jacobi reachability: Some recent theoretical advances and applications in unmanned airspace management,”Annual Review of Control, Robotics, and Autonomous Systems, vol. 1, no. 1, pp. 333–358, 2018
2018
-
[28]
Bas ¸ar and G
T. Bas ¸ar and G. J. Olsder,Dynamic noncooperative game theory. SIAM, 1998
1998
-
[29]
Tambe,Security and Game Theory: Algorithms, Deployed Systems, Lessons Learned
M. Tambe,Security and Game Theory: Algorithms, Deployed Systems, Lessons Learned. Cambridge University Press, 2011
2011
-
[30]
Computing optimal randomized resource allo- cations for massive security games,
C. Kiekintveldet al., “Computing optimal randomized resource allo- cations for massive security games,” tech. rep., 2009
2009
-
[31]
Playing stackelberg security games in perfect formulations,
P. Bustamante-Fa ´undezet al., “Playing stackelberg security games in perfect formulations,”Omega, vol. 126, p. 103068, 2024
2024
-
[32]
Generalized nash equilibrium problems,
F. Facchinei and C. Kanzow, “Generalized nash equilibrium problems,” Annals of Operations Research, vol. 175, no. 1, pp. 177–211, 2010
2010
-
[33]
On the implementation of an interior- point filter line-search algorithm for large-scale nonlinear program- ming,
A. W ¨achter and L. T. Biegler, “On the implementation of an interior- point filter line-search algorithm for large-scale nonlinear program- ming,”Mathematical Programming, vol. 106, no. 1, pp. 25–57, 2006
2006
-
[34]
Casadi—a software framework for nonlinear optimization and optimal control,
J. Andersson, J. Gillis, G. Horn, J. Rawlings, and M. Diehl, “Casadi—a software framework for nonlinear optimization and optimal control,” Mathematical Programming Computation, vol. 11, no. 1, pp. 1–36, 2018
2018
-
[35]
Crazyflie 2.0 quadrotor as a platform for research and education in robotics and control engineering,
W. Giernacki, M. Skwierczy ´nski, W. Witwicki, P. Wro ´nski, and P. Kozierski, “Crazyflie 2.0 quadrotor as a platform for research and education in robotics and control engineering,” in2017 22nd international conference on methods and models in automation and robotics (MMAR), pp. 37–42, IEEE, 2017
2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.