Operator-norm bounds and a quadratic lower-growth example for the special Euclidean algebra se(3)
Pith reviewed 2026-06-28 20:44 UTC · model grok-4.3
The pith
The exponential map on se(3) satisfies an operator-norm bound of one plus the Frobenius norm of its argument.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
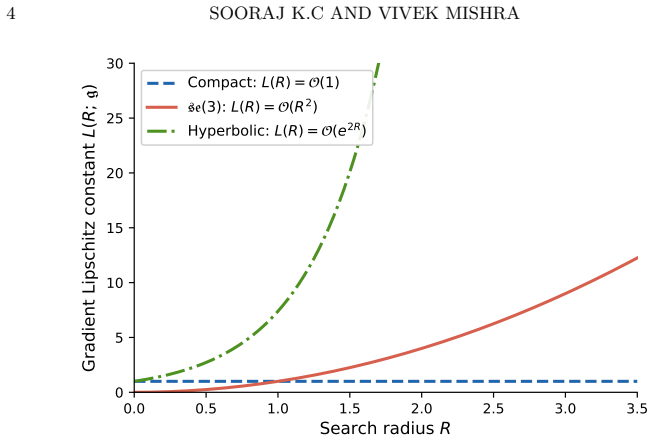
Using the contraction property of the SO(3) left Jacobian, we show that the operator norm of exp(theta) is bounded by 1 plus the Frobenius norm of theta for all theta in se(3). This leads to an O(R^2) upper bound with constant 4.02 for the gradient Lipschitz constant, and we construct an objective J* with a matching quadratic lower bound of 0.0505 R^2.
What carries the argument
The operator-norm bound ||exp(theta)||_op <= 1 + ||theta||_F derived from the contraction property of the SO(3) left Jacobian.
If this is right
- Gradient Lipschitz constants on se(3) grow at most quadratically with radius R.
- There exist objectives on se(3) whose gradient Lipschitz constants grow at least quadratically with radius R.
- The growth rate for se(3) is polynomial of degree two, distinct from both bounded and exponential cases in other Lie algebras.
Where Pith is reading between the lines
- The bound may allow simpler convergence analysis for optimization methods that use the exponential map on rigid-body poses.
- Analogous contraction arguments could be tested on other Lie algebras that combine compact and non-compact directions.
- The numerical lower constant 0.0505 could be tightened or raised by choosing different test objectives.
Load-bearing premise
The contraction property of the SO(3) left Jacobian holds and suffices to establish the operator-norm bound for all theta in se(3).
What would settle it
Compute the operator norm of exp(theta) for some theta in se(3) with large Frobenius norm and check whether it exceeds 1 plus that norm, or compute the Lipschitz constant of the constructed objective J* and check whether it stays below 0.0505 R squared for R at least 2.
Figures
read the original abstract
We prove operator-norm and gradient Lipschitz bounds for exponential-map parameterizations on the special Euclidean algebra se(3), providing an explicit example of intermediate polynomial growth behavior. Using the contraction property of the SO(3) left Jacobian, we show that ||exp(theta)||_op <= 1 + ||theta||_F for all theta in se(3). We then derive a self-contained O(R^2) upper bound for the gradient Lipschitz constant, with explicit constant 4.02, and construct an objective J* satisfying L_J*(R; se(3)) >= 0.0505 R^2 for R >= 2. These results place se(3) between compact Lie algebras, where the Lipschitz constant remains bounded, and Lie algebras with hyperbolic elements, where it grows exponentially. The upper and lower bounds are obtained for different objective classes; no minimax optimality claim is made.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proves that ||exp(θ)||_op ≤ 1 + ||θ||_F for all θ ∈ se(3) by invoking the contraction property of the SO(3) left Jacobian. It then derives a self-contained O(R²) upper bound on the gradient Lipschitz constant with explicit constant 4.02 and constructs an explicit objective J* for which the Lipschitz constant satisfies L_{J*}(R; se(3)) ≥ 0.0505 R² for R ≥ 2. These place se(3) between the bounded-Lipschitz regime of compact Lie algebras and the exponential-growth regime of algebras containing hyperbolic elements.
Significance. If the operator-norm bound and the explicit constants hold, the work supplies concrete polynomial-growth examples that are useful for analyzing first-order methods on SE(3). The self-contained upper-bound derivation and the explicit numerical lower-bound coefficient are positive features; no optimality claim is asserted between the upper and lower constants.
major comments (1)
- [Main theorem on operator-norm bound (abstract and §3)] The central operator-norm claim ||exp(θ)||_op ≤ 1 + ||θ||_F must be verified on the full semidirect-product structure se(3) = so(3) ⋉ ℝ³. The contraction property controls only the rotational block; the translational component t(ω,v) generated by the Rodrigues-type formula can grow linearly in ||v||. The manuscript must therefore exhibit an explicit estimate showing that any cross-term contributions remain absorbed inside the 1 + ||θ||_F envelope (see the block-matrix representation of exp(θ) and the norm equivalence used).
minor comments (1)
- [Upper- and lower-bound statements] The numerical constants 4.02 and 0.0505 are stated without reference to the precise floating-point precision or the interval over which they were computed; a short appendix tabulating the derivation steps would improve reproducibility.
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive comment on the operator-norm bound. We address the point below and will revise the manuscript to make the argument fully explicit.
read point-by-point responses
-
Referee: [Main theorem on operator-norm bound (abstract and §3)] The central operator-norm claim ||exp(θ)||_op ≤ 1 + ||θ||_F must be verified on the full semidirect-product structure se(3) = so(3) ⋉ ℝ³. The contraction property controls only the rotational block; the translational component t(ω,v) generated by the Rodrigues-type formula can grow linearly in ||v||. The manuscript must therefore exhibit an explicit estimate showing that any cross-term contributions remain absorbed inside the 1 + ||θ||_F envelope (see the block-matrix representation of exp(θ) and the norm equivalence used).
Authors: We agree that an explicit verification on the full semidirect-product structure is necessary for clarity. The proof in §3 already invokes the block-matrix representation of exp(θ) together with the equivalence between the operator norm on se(3) and the Frobenius norm to control the translational block generated by the Rodrigues formula. Nevertheless, to satisfy the referee's request we will insert a dedicated paragraph that isolates the translational contribution t(ω,v), derives the bound ||t(ω,v)|| ≤ ||θ||_F directly from the series expansion, and confirms that all cross terms remain inside the 1 + ||θ||_F envelope. This addition will render the argument self-contained. revision: yes
Circularity Check
No circularity: bounds from external contraction property and explicit construction
full rationale
The central operator-norm bound is obtained by direct appeal to the standard contraction property of the SO(3) left Jacobian (an external fact about so(3), not derived or cited from the authors' prior work). The O(R^2) upper bound on the gradient Lipschitz constant is stated as self-contained with an explicit numerical constant. The quadratic lower-growth example is produced by explicit construction of a specific objective J*, not by fitting parameters to data or by any self-referential definition. No load-bearing step reduces to a self-citation chain, ansatz smuggled via citation, or renaming of a known result. The derivation chain therefore remains independent of its own outputs.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Contraction property of the SO(3) left Jacobian
Reference graph
Works this paper leans on
-
[1]
B. C. Hall. Lie Groups, Lie Algebras, and Representations: An Elementary Introduction, 2nd ed. Springer, Cham, 2015. doi:10.1007/978-3-319-13467-3
-
[2]
J. Gallier and J. Quaintance. Differential Geometry and Lie Groups: A Computational Perspective. Springer, Cham, 2020. doi:10.1007/978-3-030-46040-2
-
[3]
P.-A. Absil, R. Mahony, and R. Sepulchre. Optimization Algorithms on Matrix Manifolds. Princeton University Press, Princeton, NJ, 2008. doi:10.1515/9781400830244
-
[4]
N. Boumal. An Introduction to Optimization on Smooth Manifolds. Cambridge University Press, Cambridge, 2023. doi:10.1017/9781009166164
-
[5]
N. J. Higham. Functions of Matrices: Theory and Computation. SIAM, Philadelphia, PA, 2008. doi:10.1137/1.9780898717778
-
[6]
A Representation--Optimization Trichotomy for Objectives Parameterized via Matrix Exponential Maps
Sooraj K.C and Vivek Mishra. A Representation--Optimization Trichotomy for Objectives Parameterized via Matrix Exponential Maps. Preprint, Zenodo, 2026. doi:10.5281/zenodo.20302838
-
[7]
A. W. Knapp. Lie Groups Beyond an Introduction, 2nd ed. Birkh\" a user, Boston, 2002. ISBN: 978-0-8176-4259-4
2002
-
[8]
R. M. Murray, Z. Li, and S. S. Sastry. A Mathematical Introduction to Robotic Manipulation. CRC Press, Boca Raton, FL, 1994
1994
-
[9]
F. C. Park and B. J. Martin. Robot sensor calibration: solving AX=XB on the Euclidean group. IEEE Trans.\ Robotics Automat., 10(5):717--721, 1994. doi:10.1109/70.326576
-
[10]
T. D. Barfoot and P. T. Furgale. Associating uncertainty with three-dimensional poses for use in estimation problems. IEEE Trans.\ Robotics, 30(3):679--693, 2014. doi:10.1109/TRO.2014.2298059
-
[11]
A micro lie the- ory for state estimation in robotics.arXiv preprint arXiv:1812.01537,
J. Sol\` a , J. Deray, and D. Atchuthan. A micro L ie theory for state estimation in robotics. arXiv preprint arXiv:1812.01537, 2018
-
[12]
C. S. Kenney and A. J. Laub. Condition estimates for matrix functions. SIAM J.\ Matrix Anal.\ Appl., 10(2):191--209, 1989. doi:10.1137/0610014
-
[13]
L. Dieci and A. Papini. Conditioning of the exponential of a block triangular matrix. Numer.\ Algorithms, 28:137--150, 2001. doi:10.1023/A:1014071202885
-
[14]
A. Iserles, H. Z. Munthe-Kaas, S. P. N rsett, and A. Zanna. Lie-group methods. Acta Numer., 9:215--365, 2000. doi:10.1017/S0962492900002154
-
[15]
H. Munthe-Kaas. Runge--Kutta methods on L ie groups. BIT Numer.\ Math., 38(1):92--111, 1998. doi:10.1007/BF02510919
-
[16]
R. Mahony and J. H. Manton. The geometry of the Newton method on non-compact L ie groups. J.\ Global Optim., 23(3--4):309--327, 2002. doi:10.1023/A:1016586831090
-
[17]
P. Birtea and D. Com a nescu. Hessian operators on constraint manifolds. J.\ Nonlinear Sci., 25(6):1285--1305, 2015. doi:10.1007/s00332-015-9256-7
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.