Coordinating Task Switching in a Robotics Multi-Agent System Using Behavior Trees
Pith reviewed 2026-06-28 16:19 UTC · model grok-4.3
The pith
Behavior trees coordinate task switching among three robots in a small soccer game, replacing the team's earlier finite-state-machine controller.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
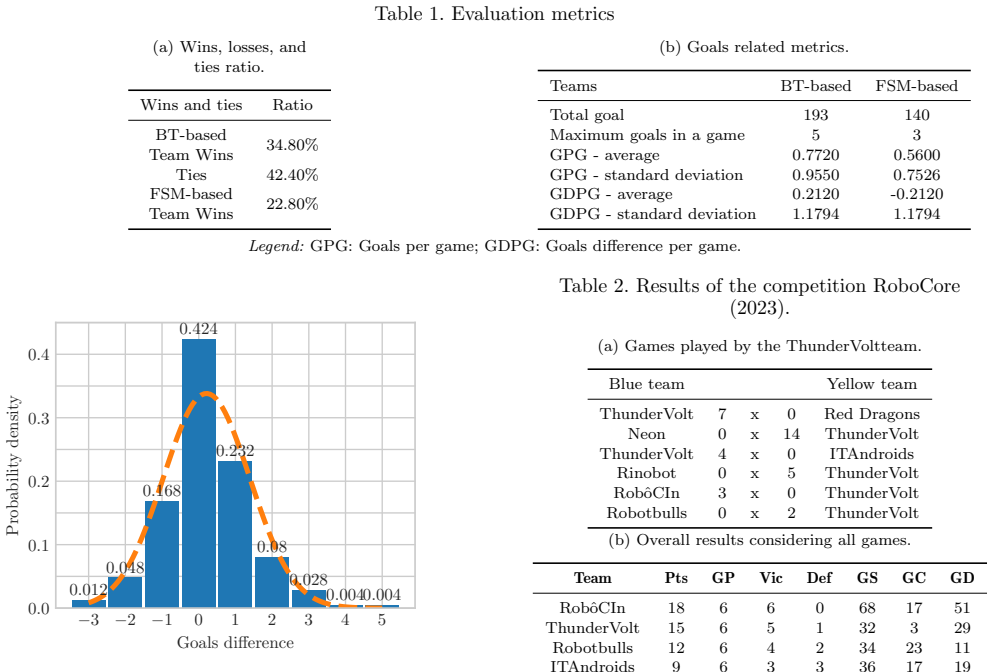
The authors present a Behavior-Tree-based approach to support multi-robot coordination within the VSSS team of the ThundeRatz robotics team. A comparison between the proposed approach and the previous one based on a Finite State Machine was conducted using the FIRASim simulator. The performance of this new strategy was further evaluated in an academic robotics competition.
What carries the argument
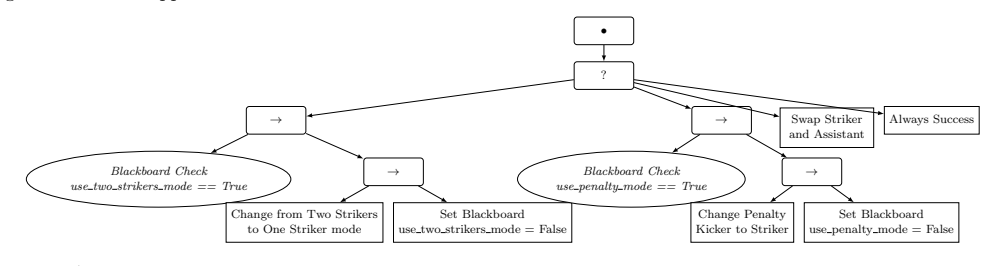
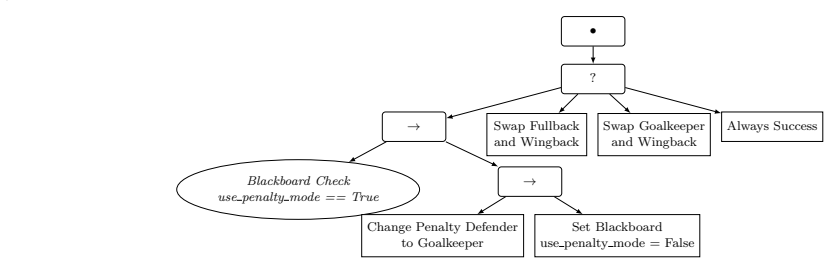
Behavior trees that define rules for switching tasks and roles among multiple robots on a soccer team.
If this is right
- The behavior-tree controller can be substituted for the finite-state-machine design to manage robot coordination.
- Simulator matches between the two controllers produce observable performance differences.
- The behavior-tree version operates successfully when deployed on real robots in competition.
- Coordination logic becomes modular and easier to extend for new team behaviors.
Where Pith is reading between the lines
- Behavior trees may simplify adding new coordination rules compared with rewriting states and transitions in a finite-state machine.
- The approach could transfer to other multi-robot tasks such as warehouse transport or search-and-rescue teams.
- Simulator validation reduces the number of costly real-robot experiments needed before competition use.
Load-bearing premise
Observed performance differences between the two controllers in simulation will correspond to meaningful advantages when the behavior-tree team plays against other real teams in competition.
What would settle it
A series of real-robot matches in which the behavior-tree team wins no more often than the finite-state-machine team would falsify the claim of practical improvement.
Figures

read the original abstract
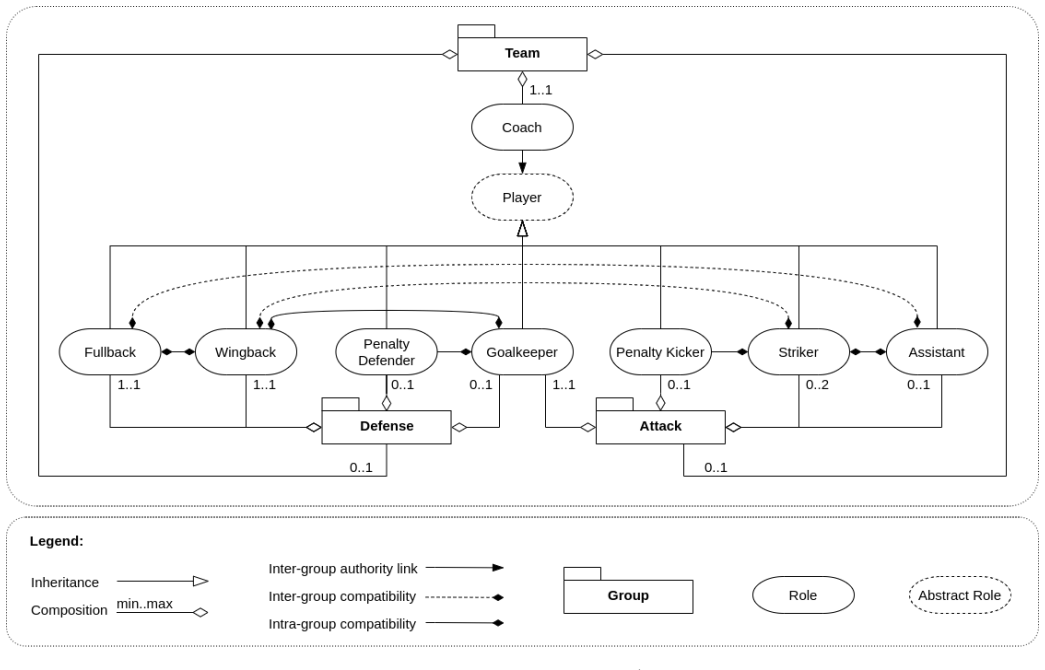
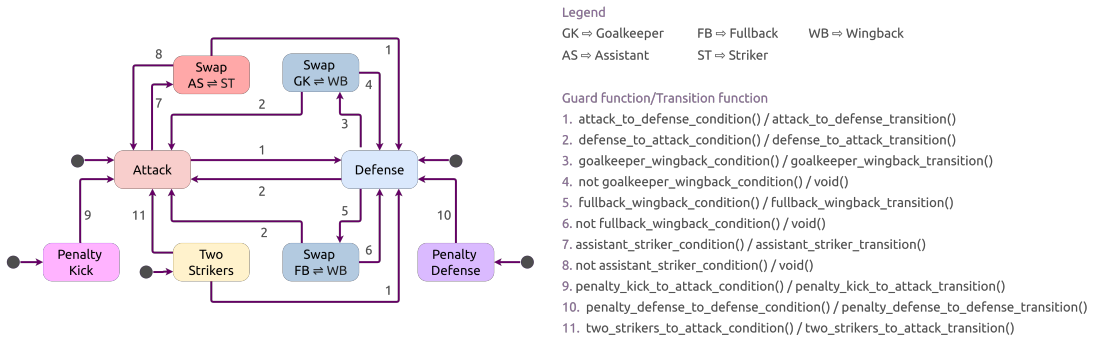
The application of multi-agent systems in robotics is a very challenging field. Several competitions involving such systems are proposed to foster research and development of strategies and mechanisms using games as the underlying domain. Among them are the ones from the \textit{IEEE Very Small Soccer (VSSS)} category, which is the case study described in this paper. In VSSS, two teams of three robots each compete in a very dynamic environment of a soccer game. Thus, coordination of robots' behavior during the game is crucial to win it. In this paper, we present a Behavior-Tree-based approach to support multi-robot coordination within the VSSS team of the ThundeRatz robotics team from the Universidade de S$\tilde{a}$o Paulo. Moreover, a comparison between the proposed approach and the previous one, which was based on a Finite State Machine (FSM), was conducted using the FIRASim simulator. Besides that, the performance of this new strategy was further evaluated in an academic robotics competition.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a Behavior-Tree-based approach for coordinating task switching in a three-robot team for the IEEE Very Small Soccer (VSSS) competition. It claims this method was compared against the team's prior Finite State Machine implementation via the FIRASim simulator and that the new strategy was further evaluated through deployment in an academic robotics competition.
Significance. If the comparison results are reproducible and the simulator-to-real gap is addressed, the work would supply a concrete engineering case study of behavior trees for reactive multi-agent coordination in a highly dynamic domain. The combination of simulator benchmarking and real-competition deployment is a strength that could inform similar robotics teams, though the current absence of quantitative evidence prevents a firm assessment of impact.
major comments (2)
- [Abstract] Abstract: the claim that 'a comparison between the proposed approach and the previous one... was conducted using the FIRASim simulator' is load-bearing for the central contribution, yet the abstract (and available text) supplies no methods, metrics, trial counts, statistical tests, or performance deltas. Without these, the superiority or viability claim cannot be evaluated.
- [Evaluation and results sections] Evaluation and results sections: the manuscript does not report how FIRASim models (or fails to model) robot-specific dynamics, wheel slip, vision latency, or inter-robot communication jitter. These factors directly affect task-switching coordination; their omission leaves the simulator-to-real transfer unverified and undermines the claim that observed differences support real-robot advantages.
minor comments (2)
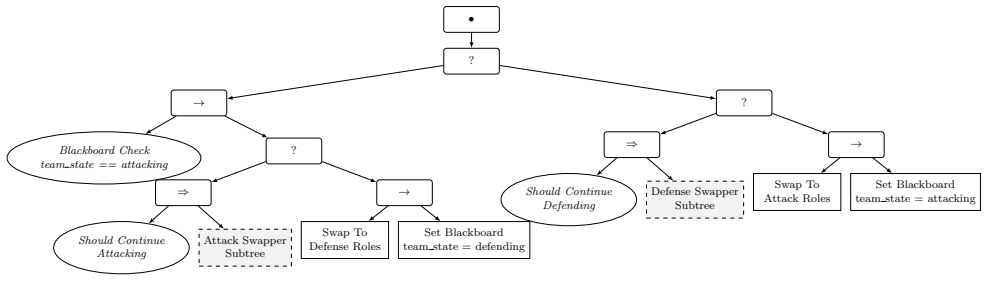
- Add explicit captions and axis labels to any figures or tables that present the FIRASim comparison so that quantitative outcomes are immediately readable.
- Clarify the precise definition of 'task switching' and the coordination protocol (e.g., role assignment, conflict resolution) early in the methods section.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major point below and indicate where revisions will be made.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that 'a comparison between the proposed approach and the previous one... was conducted using the FIRASim simulator' is load-bearing for the central contribution, yet the abstract (and available text) supplies no methods, metrics, trial counts, statistical tests, or performance deltas. Without these, the superiority or viability claim cannot be evaluated.
Authors: We agree that the abstract would be strengthened by briefly summarizing the evaluation approach. The manuscript body describes the FIRASim comparison and competition deployment; we will revise the abstract to include a concise statement of the comparison method, key metrics employed, and observed outcomes while remaining within length constraints. revision: yes
-
Referee: [Evaluation and results sections] Evaluation and results sections: the manuscript does not report how FIRASim models (or fails to model) robot-specific dynamics, wheel slip, vision latency, or inter-robot communication jitter. These factors directly affect task-switching coordination; their omission leaves the simulator-to-real transfer unverified and undermines the claim that observed differences support real-robot advantages.
Authors: We concur that explicit discussion of simulator fidelity would improve transparency. We will add a short paragraph in the Evaluation section describing FIRASim's modeling assumptions for the VSSS domain and known limitations with respect to dynamics, slip, latency, and communication, drawing on our team's experience with both simulation and hardware. revision: yes
Circularity Check
No circularity: direct empirical comparison with no derivations or fitted parameters
full rationale
The paper describes an engineering implementation of Behavior Trees for multi-robot task coordination in VSSS soccer, followed by a head-to-head comparison against a prior FSM baseline in the FIRASim simulator and in live competition. No equations, parameter fitting, uniqueness theorems, or self-citation chains appear in the provided text. The central claim rests on observable performance differences rather than any reduction of outputs to inputs by construction. This is the normal case of a self-contained systems paper whose validity is open to external falsification via replication or real-robot testing.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Agis, R.A., Gottifredi, S., and Garc´ ıa, A.J. (2020). An event-driven behavior trees extension to facilitate non-player multi-agent coordination in video games. Expert Systems with Applications, 155, 113457. doi: https://doi.org/10.1016/j.eswa.2020.113457. URL https://www.sciencedirect.com/science/article/ pii/S0957417420302815. ˚Agotnes, T. and Bulling,...
-
[2]
Biggar, O., Zamani, M., and Shames, I. (2021). An expressiveness hierarchy of behavior trees and related architectures.IEEE Robotics and Automation Letters, 6(3), 5397–5404. doi:10.1109/LRA.2021.3074337
-
[3]
Billington, D., Estivill-Castro, V., Hexel, R., and Rock, A. (2010). Plausible logic facilitates engineering the behav- ior of autonomous robots. InThe IASTED International Conference on Software Engineering, 41–48. CBR (2022). Regras IEEE very small size soccer (VSSS) - s´ erie B.https://cbr.robocup.org.br/wp-content/ uploads/2021/05/vssRules3x321.pdf. A...
2010
-
[4]
and Shi, D
Chen, J. and Shi, D. (2018). Development and compo- sition of robot architecture in dynamic environment. InProceedings of the 2018 International Conference on
2018
-
[5]
Association for Computing Machinery, New York, NY, USA
Robotics, Control and Automation Engineering, RCAE 2018, 96–101. Association for Computing Machinery, New York, NY, USA. doi:10.1145/3303714.3303716. URLhttps://doi.org/10.1145/3303714.3303716
-
[6]
Colledanchise, M., Marzinotto, A., Dimarogonas, D.V., and Oegren, P. (2016). The advantages of using behavior trees in mult-robot systems. InProceedings of ISR 2016: 47st International Symposium on Robotics, 1–8
2016
-
[7]
Colledanchise, M., Parasuraman, R., and ¨Ogren, P. (2019). Learning of behavior trees for autonomous agents.IEEE Transactions on Games, 11(2), 183–189. doi:10.1109/ TG.2018.2816806
arXiv 2019
-
[8]
and ¨Ogren, P
Colledanchise, M. and ¨Ogren, P. (2018).Behavior Trees in Robotics and AI. CRC Press. doi:10.1201/ 9780429489105. URLhttps://doi.org/10.1201% 2F9780429489105
2018
-
[9]
and Colledanchise, M
Faconti, D. and Colledanchise, M. (2022). Be- haviourtree.cpp.https://github.com/BehaviorTree/ BehaviorTree.CPP/. Accessed: 2023-06-28
2022
-
[10]
Dragule, S. (2023). Behavior trees and state machines in robotics applications.IEEE Transactions on Software Engineering, 1–24. doi:10.1109/TSE.2023.3269081
-
[11]
Gillies, M. (2009). Learning finite-state machine con- trollers from motion capture data.IEEE Transactions on Computational Intelligence and AI in Games, 1(1), 63–72. doi:10.1109/TCIAIG.2009.2019630
-
[12]
Iovino, M., F ¨orster, J., Falco, P., Chung, J.J., Sieg- wart, R., and Smith, C. (2022a). On the program- ming effort required to generate behavior trees and finite state machines for robotic applications.arXiv preprint arXiv:2209.07392. URLhttps://arxiv.org/ abs/2209.07392
-
[13]
Smith, C. (2022b). A survey of behavior trees in robotics and ai.Robotics and Autonomous Sys- tems, 154, 104096. doi:https://doi.org/10.1016/j.robot. 2022.104096. URLhttps://www.sciencedirect.com/ science/article/pii/S0921889022000513
-
[14]
League, V.S.S. (2023). Very small size league.https: //vsssleague.github.io/vss/index.html. Accessed: 2026-03-16. Microsoft (2022). Blackboard design pattern.https:// social.technet.microsoft.com/wiki/contents/ articles/13215.blackboard-design-pattern.aspx. Accessed: 2026-03-17. RoboCore (2023). Simulado iron 2023 – tabela VSSS.https://docs.google.com/spr...
2023
-
[15]
Wang, F., Kyriakopoulos, K., Tsolkas, A., and Saridis, G. (1991). A petri-net coordination model for an intelligent mobile robot.IEEE Transactions on Systems, Man, and Cybernetics, 21(4), 777–789. doi:10.1109/21.108296
-
[16]
Yang, Q., Luo, Z., Song, W., and Parasuraman, R. (2019). Self-reactive planning of multi-robots with dynamic task assignments. In2019 International Symposium on Multi-Robot and Multi-Agent Systems (MRS), 89–91. doi:10.1109/MRS.2019.8901075
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.