A Novel Stripe-based RIS Optimization for UAV Communications and Sensing in Low-Altitude Wireless Networks
Pith reviewed 2026-06-27 21:23 UTC · model grok-4.3
The pith
A stripe-based RIS optimization reduces the search space for phase shifts to enable faster UAV communication and sensing updates.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
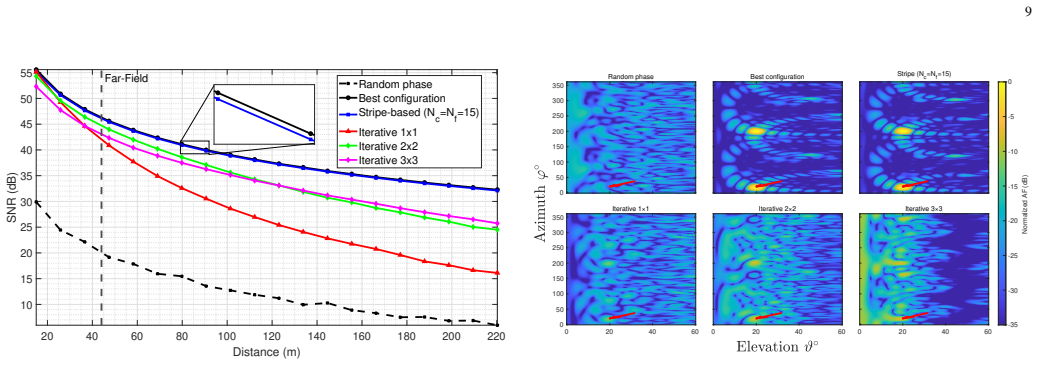
The low-complexity stripe-based RIS phase shift optimization framework leverages the inherent structural phase-gradient of adjacent RIS elements to significantly reduce the search space for calculating and updating the RIS configuration as the UAV moves, outperforming conventional benchmarks in convergence speed and computational efficiency while maintaining robust high-SNR connectivity even in the presence of phase estimation errors and low-SNR regimes, with practical viability shown by outdoor prototype measurements.
What carries the argument
The stripe-based RIS phase shift optimization framework, which reduces the optimization search space by exploiting the structural phase-gradient between adjacent RIS elements.
If this is right
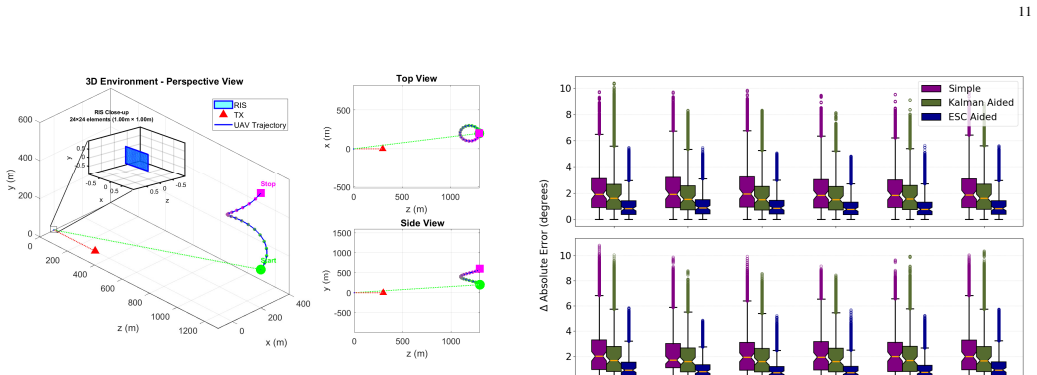
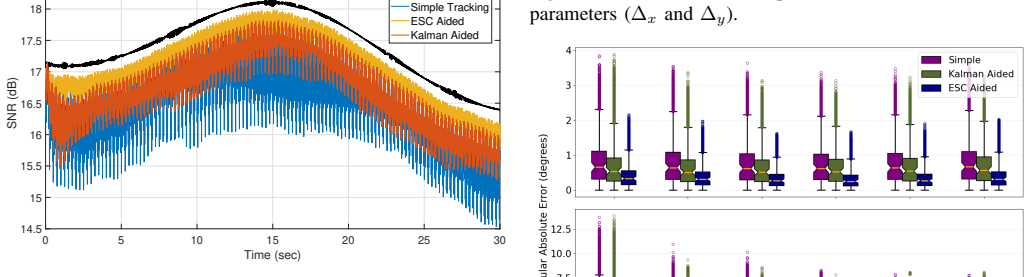
- The framework simultaneously supports communication reliability and passive sensing for UAV tracking under 3D mobility.
- It achieves faster convergence and lower computational cost than conventional optimization approaches.
- Robust high-SNR performance is retained despite phase estimation errors and operation in low-SNR regimes.
- Outdoor prototype measurements confirm practical viability in real campus environments with blockages.
Where Pith is reading between the lines
- The reduced search space could enable real-time RIS reconfiguration on resource-limited edge hardware for fast-moving UAVs.
- The same gradient-exploitation idea might apply to other mobile platforms such as ground vehicles or swarms in obstructed settings.
- Joint communication-sensing operation may improve overall network resilience when channel conditions vary rapidly.
- Scaling the stripe width or combining multiple stripes could be tested to balance performance and complexity on larger surfaces.
Load-bearing premise
The structural phase-gradient between adjacent RIS elements can be used to shrink the search space without unacceptable performance loss under 3D UAV mobility and changing channels.
What would settle it
A simulation or outdoor test in which the stripe-based method requires more iterations or delivers lower SNR than conventional optimization when the UAV follows realistic 3D trajectories with added phase estimation noise.
Figures






read the original abstract
Low-altitude wireless networks (LAWN) envision a reconfigurable 3D network capable of supporting mission-critical aerial operations. This paper presents a reconfigurable intelligent surface (RIS)-assisted LAWN to establish a reliable communication with an unmanned aerial vehicle (UAV) across varying wireless channel conditions and signal blockages. A low complexity stripe-based RIS phase shift optimization framework is proposed to simultaneously enhance communication reliability and provide passive sensing capability for UAV tracking under 3D mobility. Unlike high-complexity optimization approaches, the proposed method leverages the inherent structural phase-gradient of the RIS adjacent elements to significantly reduce the search space for calculating and updating the RIS configuration as the UAV moves. The analysis and simulation results demonstrate that the proposed framework outperforms conventional benchmarks in convergence speed and computational efficiency, while maintaining robust, high signal-to-noise-ratio (SNR) connectivity even in the presence of phase estimation errors and low SNR regimes. In addition, the measurement experiments using a real RIS prototype in an outdoor campus environment are performed to demonstrate the practical viability of the proposed approach.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a stripe-based RIS phase shift optimization framework for UAV communications and passive sensing in low-altitude wireless networks (LAWN). It exploits the inherent structural phase-gradient between adjacent RIS elements to shrink the configuration search space under 3D UAV mobility, claiming faster convergence, lower computational complexity than conventional benchmarks, robust high-SNR performance despite phase estimation errors and low-SNR regimes, and practical viability via outdoor prototype measurements.
Significance. If the reported gains in convergence and efficiency are confirmed without unacceptable degradation under mobility, the structural-reduction approach would be a useful practical contribution for real-time RIS control in dynamic aerial scenarios. The inclusion of prototype experiments is a positive element that strengthens applicability claims; the method is noted to rest on structural properties rather than parameter fitting, avoiding circularity.
minor comments (2)
- Abstract: quantitative benchmark definitions, error-bar reporting, and the precise modeling of phase estimation errors are not detailed, making the central performance claims only partially verifiable from the provided text.
- The manuscript should explicitly state the conventional optimization baselines (e.g., exhaustive search, gradient descent) and report concrete metrics such as iteration counts or runtime ratios to support the convergence-speed claim.
Simulated Author's Rebuttal
We thank the referee for the constructive review and the recommendation of minor revision. The summary accurately reflects the core contributions of our stripe-based RIS optimization framework for UAV communications and passive sensing in LAWN scenarios.
Circularity Check
No significant circularity; derivation is self-contained
full rationale
The paper proposes a stripe-based RIS phase optimization that exploits the physical structural phase-gradient property of adjacent RIS elements to shrink the configuration search space under UAV mobility. This leverage of inherent RIS structure is a modeling choice grounded in device physics, not a fitted parameter or self-referential definition. Performance claims are supported by separate simulation benchmarks and outdoor prototype measurements, which are independent of the optimization derivation itself. No equations or steps reduce the claimed gains to quantities defined by the same inputs; no load-bearing self-citations or uniqueness theorems imported from prior author work are evident in the abstract or described framework. The central claim remains externally falsifiable via the reported experiments.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption RIS elements can be grouped into stripes sharing a fixed phase gradient without violating far-field or planar wavefront assumptions
Reference graph
Works this paper leans on
-
[1]
W. Yuan, Y . Cui, J. Wang, F. Liu, G. Sun, T. Xiang, J. Xu, S. Jin, D. Niy- ato, S. Coleriet al., “From ground to sky: Architectures, applications, and challenges shaping low-altitude wireless networks,”arXiv preprint arXiv:2506.12308, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[2]
Accessing from the sky: A tutorial on UA V communications for 5G and beyond,
Y . Zeng, Q. Wu, and R. Zhang, “Accessing from the sky: A tutorial on UA V communications for 5G and beyond,”Proceedings of the IEEE, vol. 107, no. 12, pp. 2327–2375, 2019
2019
-
[3]
On the performance of RIS-assisted dual-hop UA V communication systems,
L. Yang, F. Meng, J. Zhang, M. O. Hasna, and M. D. Renzo, “On the performance of RIS-assisted dual-hop UA V communication systems,” IEEE Transactions on V ehicular Technology, vol. 69, no. 9, pp. 10 385– 10 390, 2020
2020
-
[4]
Reconfigurable intelligent surface assisted UA V communication: Joint trajectory design and passive beamforming,
S. Li, B. Duo, X. Yuan, Y .-C. Liang, and M. Di Renzo, “Reconfigurable intelligent surface assisted UA V communication: Joint trajectory design and passive beamforming,”IEEE Wireless Communications Letters, vol. 9, no. 5, pp. 716–720, 2020
2020
-
[5]
Enhancing cellular communications for UA Vs via intelligent reflective surface,
D. Ma, M. Ding, and M. Hassan, “Enhancing cellular communications for UA Vs via intelligent reflective surface,” in2020 IEEE Wireless Communications and Networking Conference (WCNC), 2020, pp. 1–6
2020
-
[6]
Machine learning empowered trajectory and passive beamforming design in UA V-RIS wireless networks,
X. Liu, Y . Liu, and Y . Chen, “Machine learning empowered trajectory and passive beamforming design in UA V-RIS wireless networks,”IEEE Journal on Selected Areas in Communications, vol. 39, no. 7, pp. 2042– 2055, 2021
2042
-
[7]
3D-trajectory and phase- shift design for RIS-assisted UA V systems using deep reinforcement learning,
H. Mei, K. Yang, Q. Liu, and K. Wang, “3D-trajectory and phase- shift design for RIS-assisted UA V systems using deep reinforcement learning,”IEEE Transactions on V ehicular Technology, vol. 71, no. 3, pp. 3020–3029, 2022
2022
-
[8]
Sum-rate maximization for IRS-assisted UA V OFDMA communication systems,
Z. Wei, Y . Cai, Z. Sun, D. W. Kwan Ng, and J. Yuan, “Sum-rate maximization for IRS-assisted UA V OFDMA communication systems,” inGLOBECOM 2020 - 2020 IEEE Global Communications Conference, 2020, pp. 1–7
2020
-
[9]
UA V- assisted intelligent reflecting surface symbiotic radio system,
M. Hua, L. Yang, Q. Wu, C. Pan, C. Li, and A. L. Swindlehurst, “UA V- assisted intelligent reflecting surface symbiotic radio system,”IEEE Transactions on Wireless Communications, vol. 20, no. 9, pp. 5769– 5785, 2021
2021
-
[10]
Robust secure UA V communications with the aid of reconfigurable intelligent surfaces,
S. Li, B. Duo, M. D. Renzo, M. Tao, and X. Yuan, “Robust secure UA V communications with the aid of reconfigurable intelligent surfaces,” IEEE Transactions on Wireless Communications, vol. 20, no. 10, pp. 6402–6417, 2021
2021
-
[11]
RIS-assisted UA V-enabled wireless powered communications: System modeling and optimization,
L. Zhai, Y . Zou, J. Zhu, and Y . Jiang, “RIS-assisted UA V-enabled wireless powered communications: System modeling and optimization,” IEEE Transactions on Wireless Communications, vol. 23, no. 5, pp. 5094–5108, 2024
2024
-
[12]
Efficient resource allocation in RIS- assisted UA Vs-enabled B5G/6G networks using digital twins,
A. Shafi, M. Ali, and M. Naeem, “Efficient resource allocation in RIS- assisted UA Vs-enabled B5G/6G networks using digital twins,”IEEE Access, vol. 13, pp. 146 237–146 251, 2025
2025
-
[13]
RIS-assisted joint waveform design for PAPR-aware AA V-enabled integrated sensing and communication,
M. Gu, Y . Liu, B. He, W. Huangfu, and K. Long, “RIS-assisted joint waveform design for PAPR-aware AA V-enabled integrated sensing and communication,”IEEE Transactions on V ehicular Technology, vol. 74, no. 7, pp. 10 480–10 494, 2025
2025
-
[14]
Multiagent deep reinforcement learning for AA V-RIS- assisted integrated sensing and communication,
A. M. Huroon, G. B. Tarekegn, A. M. A. Abdo, A. Amjad, L.-C. Tai, and L.-C. Wang, “Multiagent deep reinforcement learning for AA V-RIS- assisted integrated sensing and communication,”IEEE Internet of Things Journal, vol. 12, no. 19, pp. 40 083–40 097, 2025
2025
-
[15]
Hybrid-RIS-assisted cellular ISAC networks for UA V- enabled low-altitude economy via deep reinforcement learning with mixture-of-experts,
Z. Ma, Y . Liang, Q. Zhu, J. Zheng, Z. Lian, L. Zeng, C. Fu, Y . Peng, and B. Ai, “Hybrid-RIS-assisted cellular ISAC networks for UA V- enabled low-altitude economy via deep reinforcement learning with mixture-of-experts,”IEEE Transactions on Cognitive Communications and Networking, vol. 12, pp. 3875–3888, 2026
2026
-
[16]
Secure enhancement for RIS-aided UA V with ISAC: Robust design and resource allocation,
Y . Xiu, W. Lyu, P. L. Yeoh, Y . Ai, and N. Wei, “Secure enhancement for RIS-aided UA V with ISAC: Robust design and resource allocation,” IEEE Transactions on V ehicular Technology, pp. 1–16, 2025
2025
-
[17]
Dual target-mounted RISs-assisted ISAC against eavesdropping and malicious interference,
Z. Yigit, S. Kayraklik, E. Basar, and A. Gorcin, “Dual target-mounted RISs-assisted ISAC against eavesdropping and malicious interference,” arXiv preprint arXiv:2509.02030, 2025
-
[18]
RIS-enabled UA V communications and sensing: Opportunities, challenges, and key technologies,
Y . Zhao, M. Jian, and Y . Yuan, “RIS-enabled UA V communications and sensing: Opportunities, challenges, and key technologies,”IEEE Transactions on Cognitive Communications and Networking, vol. 12, pp. 5451–5472, 2026
2026
-
[19]
Passive beamforming for practical RIS-assisted communication systems with non-ideal hardware,
Y . Liu, R. Wang, and Z. Han, “Passive beamforming for practical RIS-assisted communication systems with non-ideal hardware,”IEEE Transactions on V ehicular Technology, vol. 73, no. 11, pp. 17 743– 17 748, 2024
2024
-
[20]
In- door coverage enhancement for RIS-assisted communication systems: Practical measurements and efficient grouping,
S. Kayraklık, I. Yildirim, Y . Gevez, E. Basar, and A. G ¨orc ¸in, “In- door coverage enhancement for RIS-assisted communication systems: Practical measurements and efficient grouping,” inICC 2023 - IEEE International Conference on Communications, 2023, pp. 485–490
2023
-
[21]
Indoor measurements for RIS-aided communication: Practical phase shift optimization, coverage enhancement, and physical layer security,
S. Kayraklik, I. Yildirim, I. Hokelek, Y . Gevez, E. Basar, and A. Gorcin, “Indoor measurements for RIS-aided communication: Practical phase shift optimization, coverage enhancement, and physical layer security,” IEEE Open Journal of the Communications Society, vol. 5, pp. 1243– 1255, 2024
2024
-
[22]
Intelligent and robust UA V-aided multiuser RIS communication technique with jittering UA V and imperfect hardware constraints,
A. B. M. Adam, X. Wan, M. A. M. Elhassan, M. S. A. Muthanna, A. Muthanna, N. Kumar, and M. Guizani, “Intelligent and robust UA V-aided multiuser RIS communication technique with jittering UA V and imperfect hardware constraints,”IEEE Transactions on V ehicular Technology, vol. 72, no. 8, pp. 10 737–10 753, 2023
2023
-
[23]
RIS-assisted three- dimensional drone localization and tracking under hardware impair- ments,
M. Meles, A. Rajasekaran, L. Mela, and R. J ¨antti, “RIS-assisted three- dimensional drone localization and tracking under hardware impair- ments,”IEEE Access, vol. 12, pp. 81 348–81 361, 2024
2024
-
[24]
RIS-assisted beam tracking for low-altitude economy networking: Enabling technologies and applications,
J. Zhang, T. Zhang, C. Zhang, X. Feng, H. Yang, Y . Yang, Y . Liu, and G. Sun, “RIS-assisted beam tracking for low-altitude economy networking: Enabling technologies and applications,”IEEE Internet of Things Magazine, pp. 1–7, 2026
2026
-
[25]
Measurement-based characterization of physical layer security for RIS- assisted wireless systems,
S. Kes ¸ir, S. Kayraklık,˙I. H¨okelek, A. E. Pusane, E. Basar, and A. G¨orc ¸in, “Measurement-based characterization of physical layer security for RIS- assisted wireless systems,” in2023 IEEE 97th V ehicular Technology Conference (VTC2023-Spring), 2023, pp. 1–6
2023
-
[26]
W. L. Stutzman and G. A. Thiele,Antenna theory and design. John Wiley & Sons, 2012
2012
-
[27]
Beamforming optimization for wireless network aided by intelligent reflecting surface with discrete phase shifts,
Q. Wu and R. Zhang, “Beamforming optimization for wireless network aided by intelligent reflecting surface with discrete phase shifts,”IEEE Transactions on Communications, vol. 68, no. 3, pp. 1838–1851, 2020
2020
-
[28]
Geometric tracking control of a quadrotor uav on se(3),
T. Lee, M. Leok, and N. H. McClamroch, “Geometric tracking control of a quadrotor uav on se(3),” in49th IEEE Conference on Decision and Control (CDC), 2010, pp. 5420–5425
2010
-
[29]
N78 frequency band modular RIS design and implementation,
S. Kayraklık, R. Bas,, H. O. C ¸ alıs ¸kan, S. S ¸ahino˘glu, S. Erdo ˘gan, ˙I. ¨Unal, ˙I. H ¨okelek, K. Nurdan, and A. G ¨orc ¸in, “N78 frequency band modular RIS design and implementation,” in2025 55th European Microwave Conference (EuMC), 2025, pp. 795–798
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.