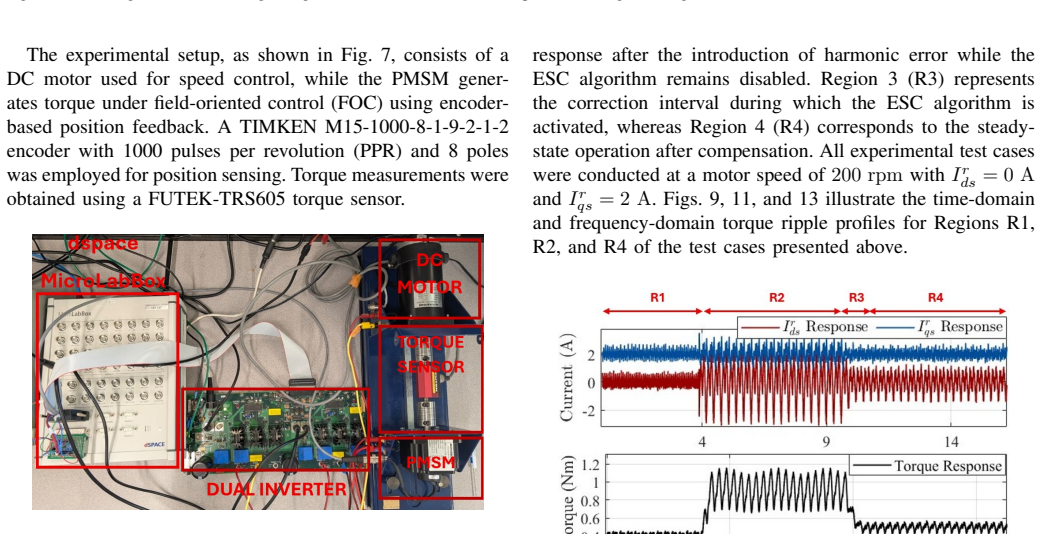
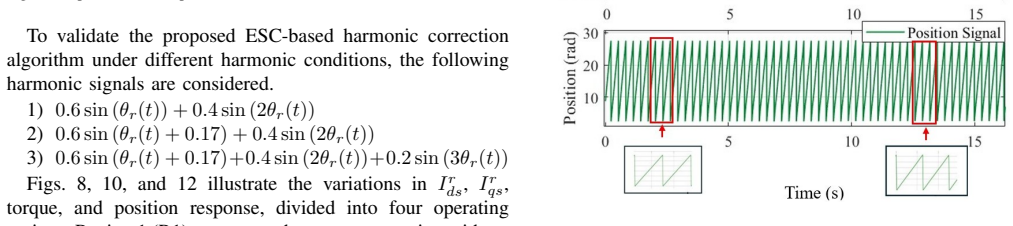
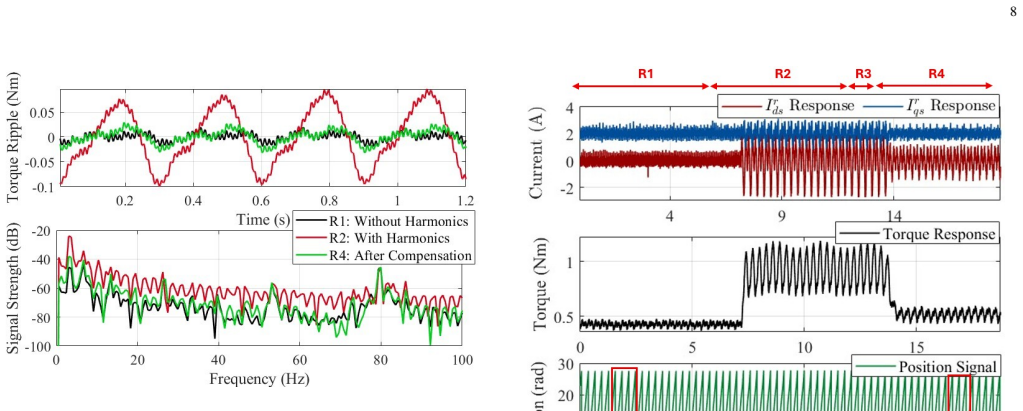
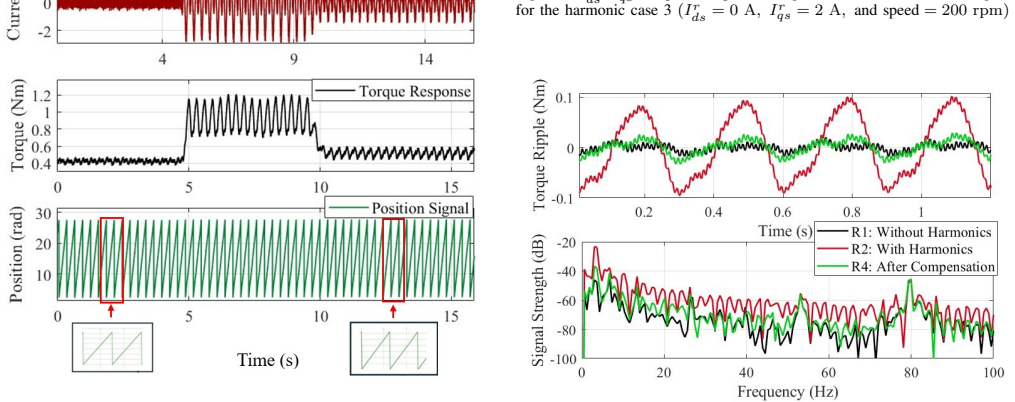
Extremum Seeking Control Based Adaptive Compensation of Position Sensor Harmonics in PMSM Drives
Pith reviewed 2026-06-27 19:47 UTC · model grok-4.3
The pith
Extremum seeking control adaptively compensates position sensor harmonics in PMSM drives to reduce torque ripple.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
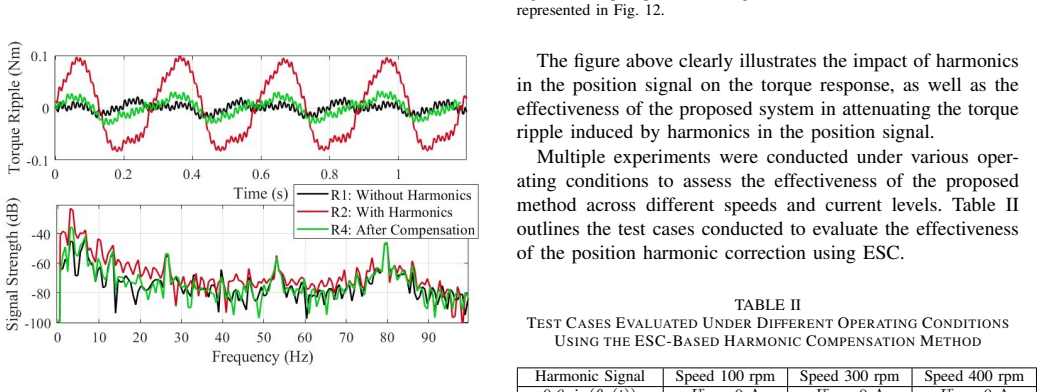
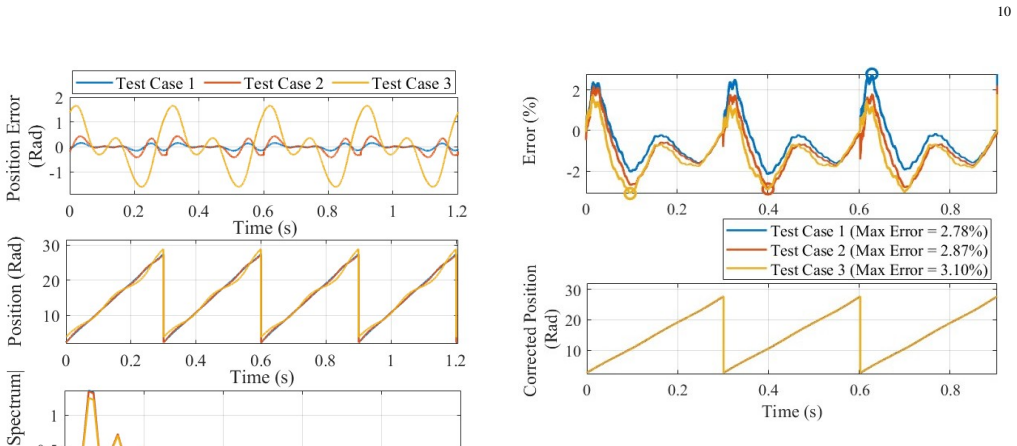
The paper claims that extremum seeking control supplies an adaptive compensation scheme for position sensor harmonics in PMSMs; the scheme is shown experimentally to lower torque ripple under varying torque, speed, and harmonic conditions while matching the performance of a look-up table method.
What carries the argument
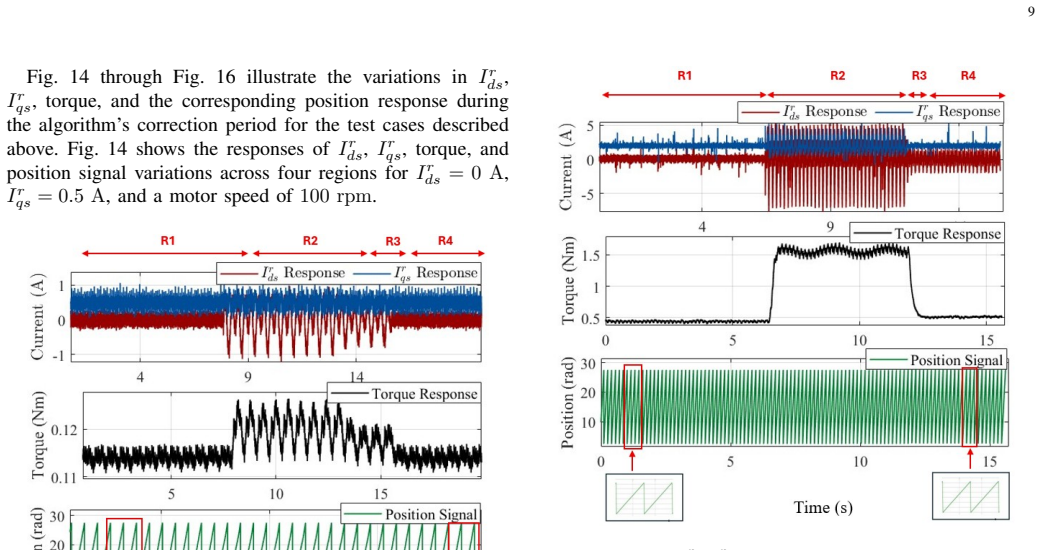
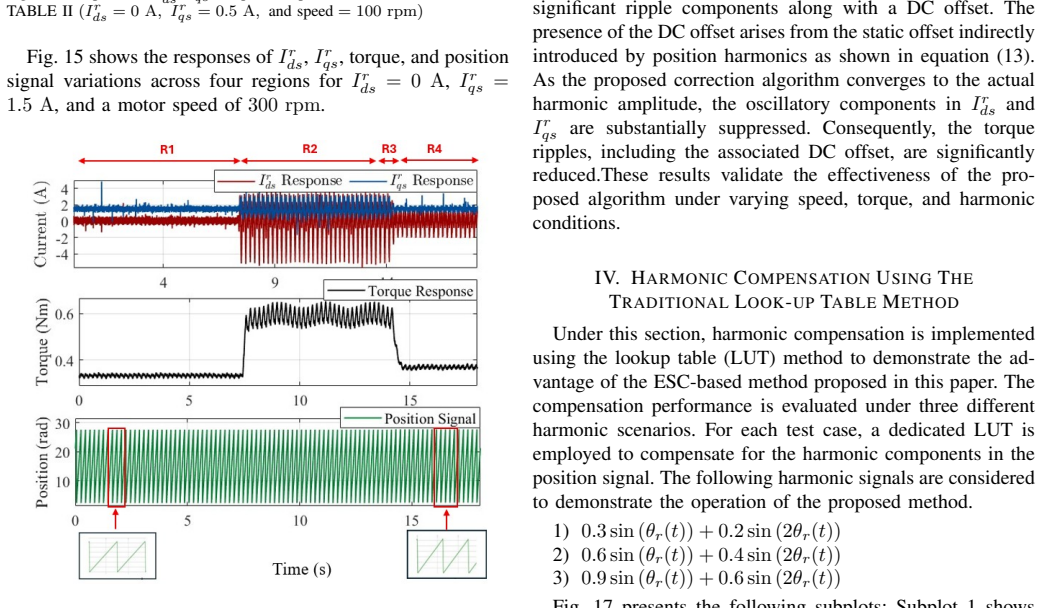
Extremum seeking control loop that continuously perturbs harmonic compensation parameters and updates them to minimize a measured torque-ripple cost index.
Load-bearing premise
The assumption that the small perturbations used by extremum seeking control will converge to correct compensation values in real time without causing instability or adding their own ripple.
What would settle it
Run the motor at a speed where a dominant sensor harmonic frequency coincides with the perturbation frequency and check whether torque ripple stops decreasing or the system becomes unstable.
Figures


read the original abstract
Permanent Magnet Synchronous Machines (PMSMs) have become one of the preferred forms of electromechanical energy converters, attributing to their high efficiency, torque density, and other unique advantages. However, given the need for proper rotor position measurement for commutation and field orientation, accurate rotor position sensing is of paramount importance. In sensing motor rotor position with a sensor, harmonic errors that arise in the sensing subsystem lead to undesirable torque ripple. Thus, this paper presents an adaptive, extremum seeking control based approach capable of mitigating position signal harmonics in PMSMs. The proposed approach is experimentally validated under varying torque, speed, and harmonic conditions. Its harmonic compensation performance is comparatively evaluated against the look-up table based method. Furthermore, the accuracy of the proposed approach is analyzed, highlighting its effectiveness.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes an extremum-seeking-control (ESC) based adaptive compensator for harmonic errors in rotor-position sensors of PMSMs. The method injects sinusoidal dither signals at estimated harmonic frequencies into the position measurement and adapts the compensation coefficients online; the authors claim that the approach reduces torque ripple, is experimentally validated across varying torque/speed/harmonic conditions, and outperforms a conventional lookup-table baseline.
Significance. If the convergence and stability claims hold, the work would supply a genuinely online, model-light alternative to offline-calibrated lookup tables for sensor-harmonic compensation, which is practically relevant for high-performance PMSM drives where resolver or encoder harmonics are a persistent source of torque ripple.
major comments (2)
- [method and stability analysis sections] The central claim that the ESC compensator converges reliably in real time without destabilizing the drive or injecting unacceptable torque ripple rests on an unproven separation of time scales between the slow ESC adaptation and the fast electrical dynamics. No averaging analysis, Lyapunov function, or explicit bound on the interaction of the dither signals through the Park transform and current controllers is supplied; experimental traces alone cannot rule out limit cycles or drift under the reported torque/speed transients.
- [experimental results section] The abstract asserts experimental validation and quantitative comparison to the lookup-table method, yet no error metrics (e.g., THD, position-error RMS, torque-ripple amplitude), operating-point ranges, or hardware description appear. Without these data the support for the performance claims cannot be assessed.
minor comments (2)
- [preliminaries] Notation for the harmonic coefficients and the ESC cost function should be introduced once and used consistently; several symbols appear without prior definition.
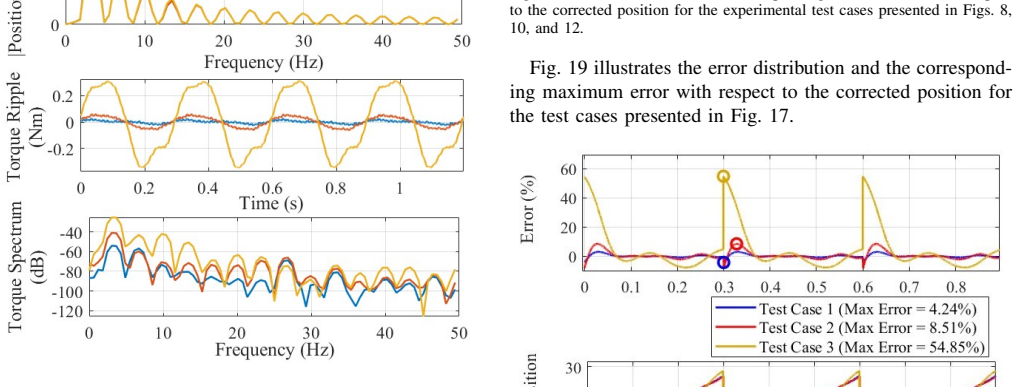
- [figures] Figure captions for the experimental waveforms should state the exact operating conditions (speed, load torque, harmonic order) rather than generic labels.
Simulated Author's Rebuttal
Thank you for the constructive feedback on our manuscript. We address each major comment below and indicate the revisions planned for the next version.
read point-by-point responses
-
Referee: [method and stability analysis sections] The central claim that the ESC compensator converges reliably in real time without destabilizing the drive or injecting unacceptable torque ripple rests on an unproven separation of time scales between the slow ESC adaptation and the fast electrical dynamics. No averaging analysis, Lyapunov function, or explicit bound on the interaction of the dither signals through the Park transform and current controllers is supplied; experimental traces alone cannot rule out limit cycles or drift under the reported torque/speed transients.
Authors: We acknowledge that the manuscript does not provide a formal averaging analysis or Lyapunov-based proof of the time-scale separation. The presentation relies on standard ESC assumptions and experimental demonstration of convergence. To address this, the revised manuscript will add a dedicated subsection with a brief averaging analysis and explicit bounds on dither-signal effects through the Park transform and current controllers. revision: yes
-
Referee: [experimental results section] The abstract asserts experimental validation and quantitative comparison to the lookup-table method, yet no error metrics (e.g., THD, position-error RMS, torque-ripple amplitude), operating-point ranges, or hardware description appear. Without these data the support for the performance claims cannot be assessed.
Authors: The full manuscript (Section IV) presents experimental results with figures comparing the proposed method to the lookup-table baseline under varying torque, speed, and harmonic conditions. However, we agree that quantitative metrics and hardware details should be stated more explicitly. The revised version will update the abstract with key metrics (THD, position-error RMS, torque-ripple amplitude), add a summary table of operating-point ranges and performance values, and include a hardware description subsection. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper proposes an ESC-based adaptive compensator for PMSM position sensor harmonics, presents the method as an application of standard extremum-seeking principles, and validates performance experimentally against an independent lookup-table baseline under varying operating conditions. No derivation step reduces by construction to its own inputs (no self-definitional relations, no fitted parameters renamed as predictions, and no load-bearing self-citations that close the argument). The central claim rests on experimental comparison rather than on any tautological reduction, making the derivation self-contained.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Real-Time Self-Healing of Position Sensor Offset Error in PMSMs,
R. K. Dissanayake and S. S. Kuruppu, “Real-Time Self-Healing of Position Sensor Offset Error in PMSMs,”IEEE Transactions on Trans- portation Electrification, vol. 11, no. 1, pp. 3125–3136, Feb. 2025, doi: 10.1109/TTE.2024.3435349
-
[2]
Position Sensor Offset Quantification in PMSM Drives via Current Estimation,
S. S. Kuruppu and Y . Zou, “Position Sensor Offset Quantification in PMSM Drives via Current Estimation,” inProc. IEEE Transportation Electrification Conference & Expo (ITEC), Chicago, IL, USA, Jun. 2020, pp. 99–104, doi: 10.1109/ITEC48692.2020.9161733
-
[3]
Nonlinear control of interior permanent-magnet synchronous motor,
M. A. Rahman, D. M. Vilathgamuwa, M. N. Uddin, and K.-J. Tseng, “Nonlinear control of interior permanent-magnet synchronous motor,” IEEE Transactions on Industry Applications, vol. 39, no. 2, pp. 408– 416, Mar./Apr. 2003, doi: 10.1109/TIA.2003.808932
-
[4]
S. S. Kuruppu, “Position Sensor Harmonics Influence on Highly Integrated Field Oriented Controlled PMSM Drive Torque Out- put,” inProc. IEEE Transportation Electrification Conference & Expo (ITEC), Chicago, IL, USA, Jun. 2021, pp. 427–433, doi: 10.1109/ITEC51675.2021.9490171
-
[5]
Transducerless position and velocity estimation in induction and salient AC machines,
P. L. Jansen and R. D. Lorenz, “Transducerless position and velocity estimation in induction and salient AC machines,”IEEE Transactions on Industry Applications, vol. 31, no. 2, pp. 240–247, Mar./Apr. 1995, doi: 10.1109/28.370269
-
[6]
Post Production PMSM Position Sensor Offset Error Quantification via V oltage Estimation,
S. S. Kuruppu and Y . Zou, “Post Production PMSM Position Sensor Offset Error Quantification via V oltage Estimation,” inProc. IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, Oct. 2020, pp. 3355–3361, doi: 10.1109/ECCE44975.2020.9235757
-
[7]
SLYT824B: Product Overview – Introduc- tion to Hall-Effect Sensors,
Texas Instruments, “SLYT824B: Product Overview – Introduc- tion to Hall-Effect Sensors,” Mar. 2022–Apr. 2024. [Online]. Available: https://www.ti.com/document-viewer/lit/html/SLYT824. [Ac- cessed: Oct. 3, 2025]
2022
-
[8]
Signal com- pensation for analog rotor position errors due to nonideal sinusoidal encoder signals,
S.-H. Hwang, D.-Y . Kim, J.-M. Kim, and D.-H. Jang, “Signal com- pensation for analog rotor position errors due to nonideal sinusoidal encoder signals,”Journal of Power Electronics, vol. 14, no. 1, pp. 82– 91, Jan. 2014
2014
-
[9]
Compensation of analog rotor position errors due to nonideal sinusoidal encoder output signals,
S.-H. Hwang, J.-H. Lee, J.-M. Kim, and C. Choi, “Compensation of analog rotor position errors due to nonideal sinusoidal encoder output signals,” inProc. IEEE Energy Conversion Congress and Exposition (ECCE), Atlanta, GA, USA, Sep. 2010, pp. 4469–4473
2010
-
[10]
On-Line Compensation of Resolver Periodic Error for PMSM Drives,
D. Chen, J. Li, J. Chen, and R. Qu, “On-Line Compensation of Resolver Periodic Error for PMSM Drives,”IEEE Transactions on Industry Applications, vol. 55, no. 6, pp. 5990–6000, Nov./Dec. 2019, doi: 10.1109/TIA.2019.2934089
-
[11]
Kalman filter based calibration of precision motion control,
S. C. Venema and B. Hannaford, “Kalman filter based calibration of precision motion control,” inProc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems (IROS), Pittsburgh, PA, USA, Aug. 1995, pp. 224– 229
1995
-
[12]
New interpolation method for quadrature encoder signals,
K. K. Tan, H. X. Zhou, and T. H. Lee, “New interpolation method for quadrature encoder signals,”IEEE Transactions on Instrumentation and Measurement, vol. 51, no. 5, pp. 1073–1079, Oct. 2002
2002
-
[13]
A Novel Hybrid Angle Tracking Observer for Resolver to Digital Conversion,
R. Hoseinnezhad and P. Harding, “A Novel Hybrid Angle Tracking Observer for Resolver to Digital Conversion,” inProc. IEEE Conf. Decision and Control (CDC), Seville, Spain, 2005, pp. 5121–5126, doi: 10.1109/CDC.2005.1583292
-
[14]
Software-based resolver-to-digital converter for DSP- based drives using an improved angle-tracking observer,
D. A. Khaburi, “Software-based resolver-to-digital converter for DSP- based drives using an improved angle-tracking observer,”IEEE Transac- tions on Instrumentation and Measurement, vol. 61, no. 4, pp. 922–929, Apr. 2012
2012
-
[15]
Self-Regulating Position Sensor Harmonic Compensation for PMSM Drives,
G. V . Dissanayake and S. S. Kuruppu, “Self-Regulating Position Sensor Harmonic Compensation for PMSM Drives,” inProc. IEEE Applied Power Electronics Conference and Exposition (APEC), 2026
2026
-
[16]
In-System Calibration of Position Sensor Off- set in PMSM Drives,
S. S. Kuruppu, “In-System Calibration of Position Sensor Off- set in PMSM Drives,” inProc. IEEE Int. Electric Machines & Drives Conf. (IEMDC), Hartford, CT, USA, 2021, pp. 1–5, doi: 10.1109/IEMDC47953.2021.9449553
-
[17]
Position Sensing Induced Parasitic Torques in Permanent Magnet Synchronous Motor Drives,
P. Pramod, K. Namburi, R. Mitra, and A. Saha, “Position Sensing Induced Parasitic Torques in Permanent Magnet Synchronous Motor Drives,” inProc. IEEE Int. Electric Machines & Drives Conf. (IEMDC), San Diego, CA, USA, 2019, pp. 1731–1736
2019
-
[18]
E. A. Y . G. Edirisinghe, L. T. W. Rajapaksha, S. G. Abeyratne, and S. S. Kuruppu, “Analysis and Quantification of Position Sensor Offset Error in Feedforward Controlled PMSMs,” inProc. IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 2022, pp. 1–6, doi: 10.1109/ECCE50734.2022.9947942
-
[19]
A review of sliding mode observer based sensorless control methods for PMSM drive,
Y . Zuo, C. Lai, and K. L. V . Iyer, “A review of sliding mode observer based sensorless control methods for PMSM drive,”IEEE Transactions on Power Electronics, vol. 38, no. 9, pp. 11352–11367, Sep. 2023, doi: 10.1109/TPEL.2023.3287828
-
[20]
K. B. Ariyur and M. Krstic,Real-Time Optimization by Extremum- Seeking Control, 1st ed. Wiley-Interscience, 2003. BIOGRAPHYSECTION Gayan Dissanayake(Student Member, IEEE) re- ceived the B.Sc. degree in Electrical and Electronic Engineering from the Faculty of Engineering, Uni- versity of Peradeniya, Sri Lanka, in 2020. Following graduation, he served as a...
2003
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.