Cooperative Guidance and Control for Active Asset Protection with Time-Varying Agent Speeds
Pith reviewed 2026-06-27 17:49 UTC · model grok-4.3
The pith
A joint strategy lets an asset and defender vary speeds and courses together to capture a maneuvering attacker by meeting three coupled objectives.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
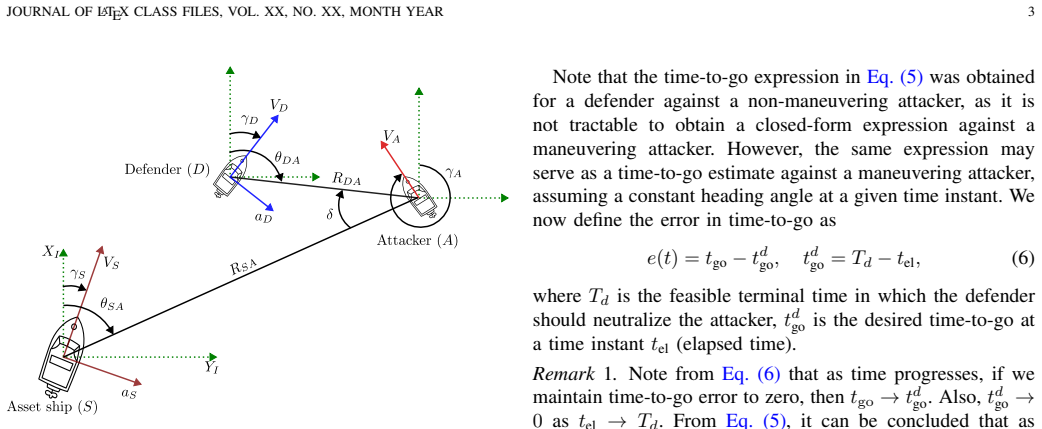
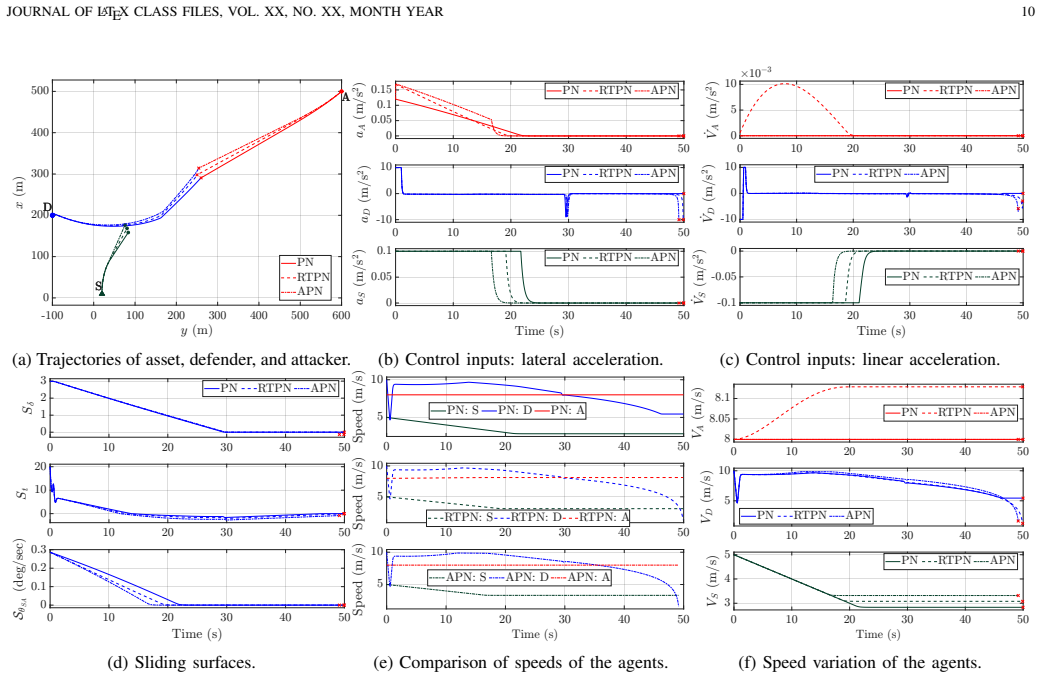
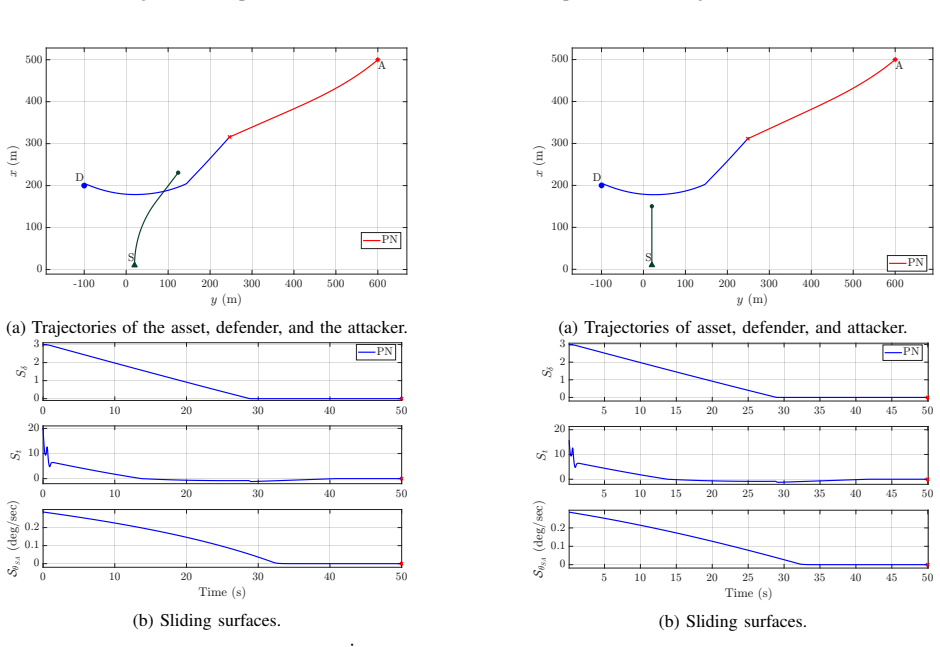
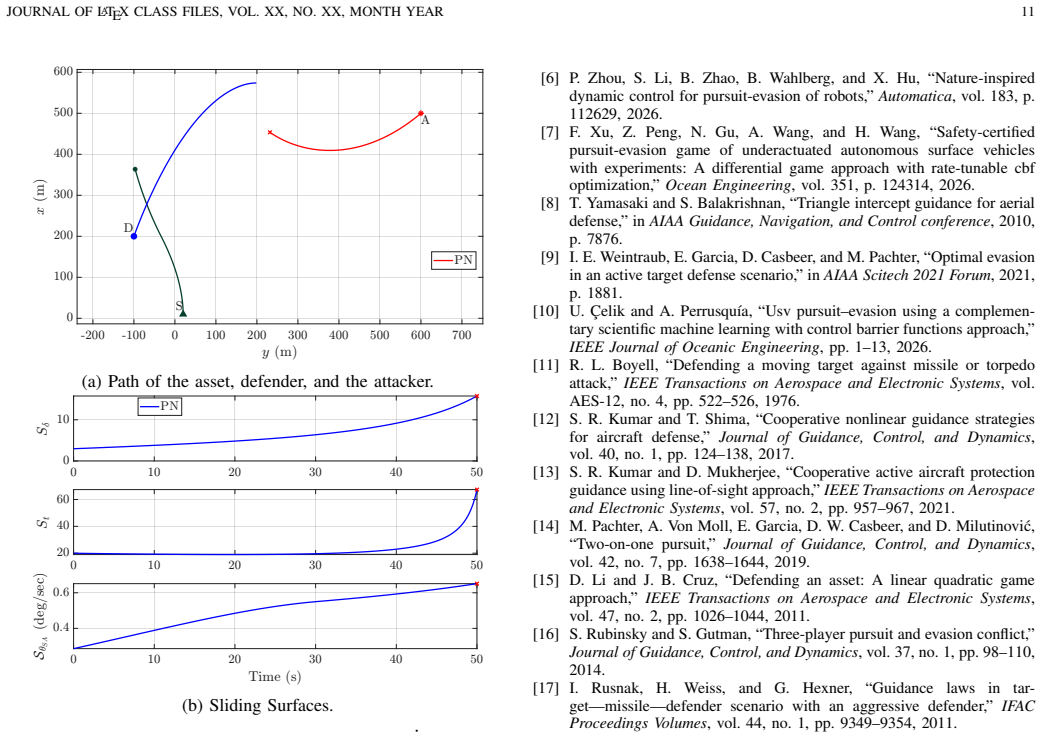
The authors formulate a cooperative guidance law in which the asset and defender jointly control their time-varying speeds and courses to drive the asset-attacker line-of-sight rate to zero, place the defender on that line of sight, and satisfy a time-to-go pursuit condition for the defender, with Lyapunov stability established for the combined system.
What carries the argument
The joint maneuver strategy that couples speed and course commands to satisfy the three geometric and temporal objectives simultaneously.
If this is right
- The attacker is forced onto a non-maneuvering collision course with the asset.
- The defender reaches the attacker before the attacker can reach the asset vicinity.
- The combined asset-defender dynamics remain stable under the Lyapunov-derived controls.
- Numerical cases confirm capture against a maneuvering attacker.
Where Pith is reading between the lines
- The same three-objective coupling might be generalized to multiple defenders by adding consensus terms on their relative positions.
- Variable-speed control could replace fixed-speed assumptions in other pursuit-evasion settings where energy or propulsion limits are present.
- Adding sensor noise or wind would test whether the Lyapunov margins remain sufficient in practice.
Load-bearing premise
The three objectives can be achieved together through speed and course adjustments without unmodeled effects such as communication delays or actuator saturation.
What would settle it
A closed-loop simulation or flight test in which the attacker’s maneuver prevents simultaneous satisfaction of zero line-of-sight rate, defender on the line of sight, and finite time-to-go capture despite the proposed controls.
Figures
read the original abstract
Protecting an asset against threats is a challenging problem in an era of continuously evolving intelligent attacks. This requires cooperation between the asset and the defender to share information and jointly maneuver. To address this problem, this work proposes a cooperative guidance and control strategy for active asset protection against a maneuvering threat. This work develops a joint maneuver strategy where both the defender and the asset coordinate their time-varying speeds and courses to neutralize/capture the attacker. The control strategy is formulated around three coupled geometric and temporal objectives. The first objective is to set the line-of-sight rate between the asset and the attacker to zero, putting the attacker on a collision course and reducing their maneuvering. The second objective is to maintain the defender on the line-of-sight between the asset and the attacker. This ensures that the attacker faces the defender first before reaching the vicinity of the asset. Lastly, the defender is also guided to pursue the attacker based on the time-to-go estimates between the defender and the attacker. While keeping these objectives in mind, the control actions for the asset and the defender are jointly designed, fostering cooperation between the two. The stability of the proposed strategy is established using a Lyapunov-based approach. Numerical simulations performed show the effectiveness of the proposed cooperative strategy in ensuring the successful capture of a maneuvering threat.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
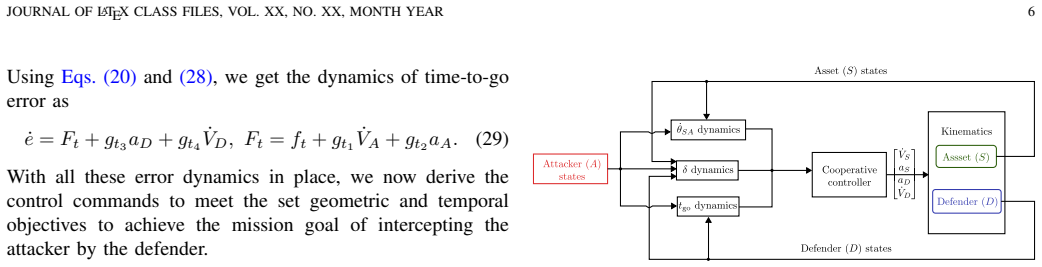
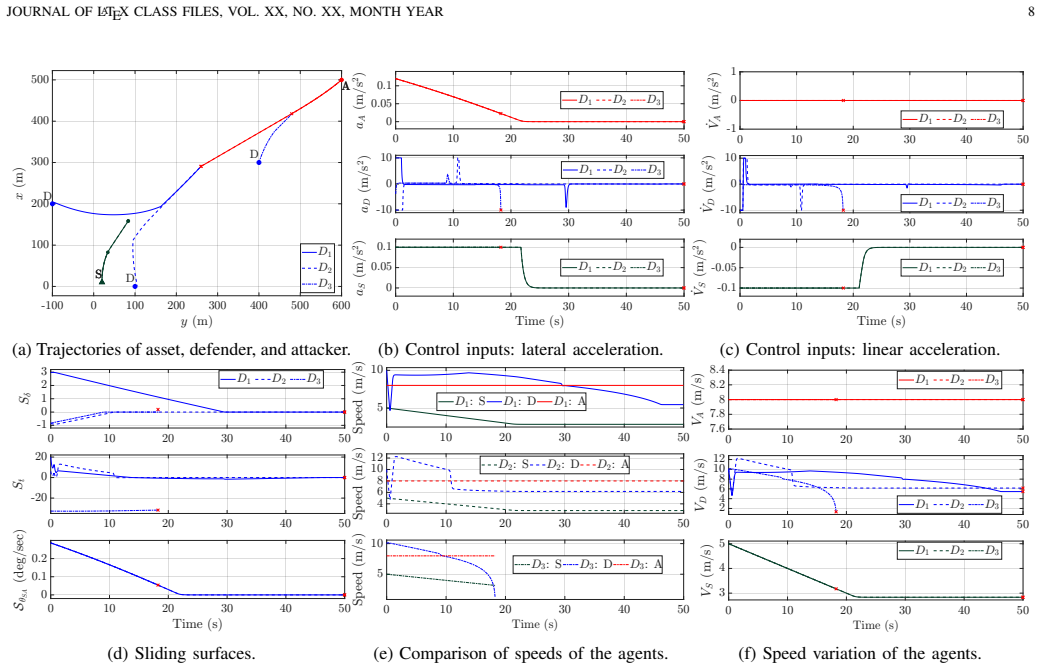
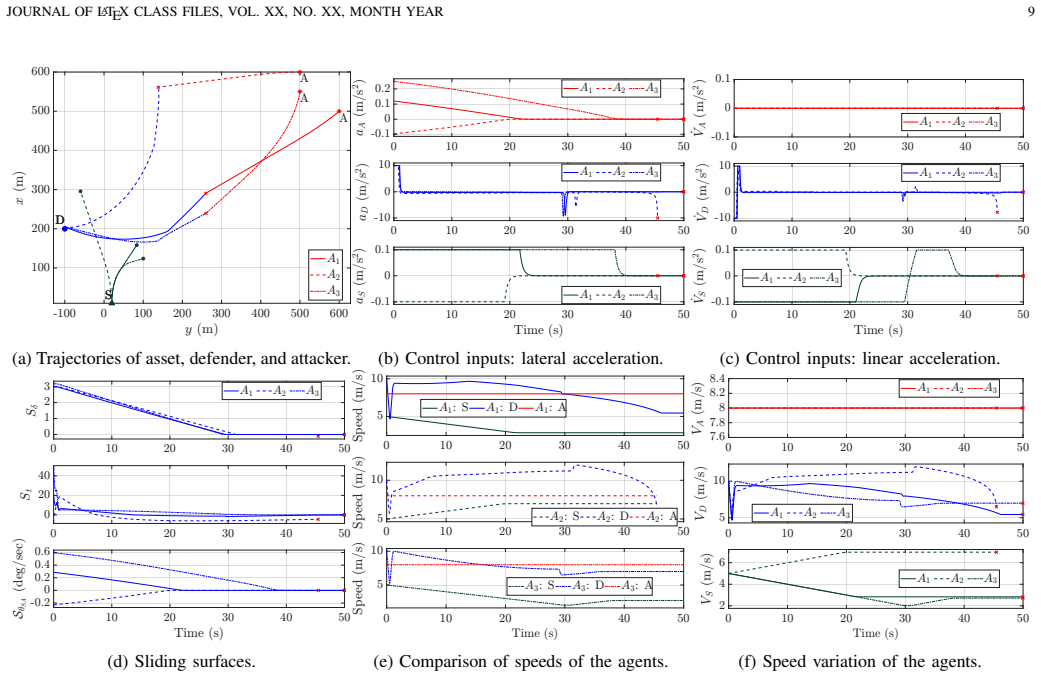
Summary. The manuscript proposes a cooperative guidance and control strategy in which an asset and a defender jointly modulate their time-varying speeds and courses to achieve three coupled objectives against a maneuvering threat: driving the asset-attacker line-of-sight rate to zero, keeping the defender on that line-of-sight, and enforcing time-to-go pursuit by the defender. Stability of the resulting closed-loop kinematics is established via a Lyapunov function constructed on the error states associated with these objectives, and numerical simulations are used to illustrate capture success for both constant-speed and time-varying threats.
Significance. If the Lyapunov argument holds under the stated kinematic model, the work supplies a joint speed-and-course formulation that simultaneously satisfies geometric and temporal constraints in a multi-agent pursuit-evasion setting. The direct construction of the Lyapunov function on the three error states and the absence of hidden circularity or division-by-zero issues constitute a clear technical contribution to cooperative guidance literature.
minor comments (2)
- [§2] The kinematic model assumptions (e.g., absence of actuator limits or communication delays) are stated only implicitly in the abstract and introduction; an explicit list in §2 would improve clarity for readers.
- [Numerical Simulations] Simulation figures would benefit from tabulated initial conditions and threat maneuver parameters to allow direct reproduction of the reported capture times.
Simulated Author's Rebuttal
We thank the referee for their positive review of the manuscript, their clear summary of the contribution, and their recommendation to accept. No major comments were raised in the report.
Circularity Check
No significant circularity
full rationale
The derivation defines three error states from the stated geometric/temporal objectives, designs joint speed-and-course controls to drive them to zero, and proves asymptotic stability via a Lyapunov function whose derivative is shown negative definite on the kinematic model. This is a self-contained standard argument with no reduction to fitted inputs, self-definitional loops, or load-bearing self-citations; the numerical simulations serve only as external confirmation rather than part of the proof.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Safety-critical cooperative pursuit planning and control of multiple autonomous surface vehicles against a partially unknown faster evader,
R. Li, N. Gu, D. Wang, Z. Peng, and W. Zhang, “Safety-critical cooperative pursuit planning and control of multiple autonomous surface vehicles against a partially unknown faster evader,”IEEE Transactions on Control of Network Systems, pp. 1–10, 2025
2025
-
[2]
Cooperative strategy for pursuit- evasion problem with collision avoidance,
Z. Sun, H. Sun, P. Li, and J. Zou, “Cooperative strategy for pursuit- evasion problem with collision avoidance,”Ocean Engineering, vol. 266, p. 112742, 2022
2022
-
[3]
Cooperative pursuit with multi-pursuer and one faster free-moving evader,
X. Fang, C. Wang, L. Xie, and J. Chen, “Cooperative pursuit with multi-pursuer and one faster free-moving evader,”IEEE Transactions on Cybernetics, vol. 52, no. 3, pp. 1405–1414, 2022
2022
-
[4]
Pursuit–evasion game for satellites based on continuous thrust reachable domain,
H. Gong, S. Gong, and J. Li, “Pursuit–evasion game for satellites based on continuous thrust reachable domain,”IEEE Transactions on Aerospace and Electronic Systems, vol. 56, no. 6, pp. 4626–4637, 2020
2020
-
[5]
Orbital three-player pursuit-evasion game,
S. Sun, H. Zhu, and W. Wang, “Orbital three-player pursuit-evasion game,”The Journal of the Astronautical Sciences, vol. 72, no. 3, p. 22, 2025
2025
-
[6]
Nature-inspired dynamic control for pursuit-evasion of robots,
P. Zhou, S. Li, B. Zhao, B. Wahlberg, and X. Hu, “Nature-inspired dynamic control for pursuit-evasion of robots,”Automatica, vol. 183, p. 112629, 2026
2026
-
[7]
Safety-certified pursuit-evasion game of underactuated autonomous surface vehicles with experiments: A differential game approach with rate-tunable cbf optimization,
F. Xu, Z. Peng, N. Gu, A. Wang, and H. Wang, “Safety-certified pursuit-evasion game of underactuated autonomous surface vehicles with experiments: A differential game approach with rate-tunable cbf optimization,”Ocean Engineering, vol. 351, p. 124314, 2026
2026
-
[8]
Triangle intercept guidance for aerial defense,
T. Yamasaki and S. Balakrishnan, “Triangle intercept guidance for aerial defense,” inAIAA Guidance, Navigation, and Control conference, 2010, p. 7876
2010
-
[9]
Optimal evasion in an active target defense scenario,
I. E. Weintraub, E. Garcia, D. Casbeer, and M. Pachter, “Optimal evasion in an active target defense scenario,” inAIAA Scitech 2021 Forum, 2021, p. 1881
2021
-
[10]
Usv pursuit–evasion using a complemen- tary scientific machine learning with control barrier functions approach,
U. C ¸ elik and A. Perrusqu´ıa, “Usv pursuit–evasion using a complemen- tary scientific machine learning with control barrier functions approach,” IEEE Journal of Oceanic Engineering, pp. 1–13, 2026
2026
-
[11]
Defending a moving target against missile or torpedo attack,
R. L. Boyell, “Defending a moving target against missile or torpedo attack,”IEEE Transactions on Aerospace and Electronic Systems, vol. AES-12, no. 4, pp. 522–526, 1976
1976
-
[12]
Cooperative nonlinear guidance strategies for aircraft defense,
S. R. Kumar and T. Shima, “Cooperative nonlinear guidance strategies for aircraft defense,”Journal of Guidance, Control, and Dynamics, vol. 40, no. 1, pp. 124–138, 2017
2017
-
[13]
Cooperative active aircraft protection guidance using line-of-sight approach,
S. R. Kumar and D. Mukherjee, “Cooperative active aircraft protection guidance using line-of-sight approach,”IEEE Transactions on Aerospace and Electronic Systems, vol. 57, no. 2, pp. 957–967, 2021
2021
-
[14]
Two-on-one pursuit,
M. Pachter, A. V on Moll, E. Garcia, D. W. Casbeer, and D. Milutinovi ´c, “Two-on-one pursuit,”Journal of Guidance, Control, and Dynamics, vol. 42, no. 7, pp. 1638–1644, 2019
2019
-
[15]
Defending an asset: A linear quadratic game approach,
D. Li and J. B. Cruz, “Defending an asset: A linear quadratic game approach,”IEEE Transactions on Aerospace and Electronic Systems, vol. 47, no. 2, pp. 1026–1044, 2011
2011
-
[16]
Three-player pursuit and evasion conflict,
S. Rubinsky and S. Gutman, “Three-player pursuit and evasion conflict,” Journal of Guidance, Control, and Dynamics, vol. 37, no. 1, pp. 98–110, 2014
2014
-
[17]
Guidance laws in tar- get—missile—defender scenario with an aggressive defender,
I. Rusnak, H. Weiss, and G. Hexner, “Guidance laws in tar- get—missile—defender scenario with an aggressive defender,”IFAC Proceedings Volumes, vol. 44, no. 1, pp. 9349–9354, 2011
2011
-
[18]
Cooperative strategies for optimal aircraft defense from an attacking missile,
E. Garcia, D. W. Casbeer, and M. Pachter, “Cooperative strategies for optimal aircraft defense from an attacking missile,”Journal of Guidance, Control, and Dynamics, vol. 38, no. 8, pp. 1510–1520, 2015
2015
-
[19]
Linear quadratic optimal cooperative strategies for active aircraft protection,
O. Prokopov and T. Shima, “Linear quadratic optimal cooperative strategies for active aircraft protection,”Journal of Guidance, Control, and Dynamics, vol. 36, no. 3, pp. 753–764, 2013
2013
-
[20]
Three-agent time- constrained cooperative pursuit-evasion,
A. Sinha, S. R. Kumar, and D. Mukherjee, “Three-agent time- constrained cooperative pursuit-evasion,”Journal of Intelligent & Robotic Systems, vol. 104, no. 2, p. 28, 2022
2022
-
[21]
Cooperative salvo based active aircraft defense using impact time guidance,
——, “Cooperative salvo based active aircraft defense using impact time guidance,”IEEE Control Systems Letters, vol. 5, no. 5, pp. 1573–1578, 2021
2021
-
[22]
Pursuit-evasion games of high speed evader,
M. V . Ramana and M. Kothari, “Pursuit-evasion games of high speed evader,”Journal of Intelligent & Robotic Systems, vol. 85, no. 2, pp. 293–306, 2017
2017
-
[23]
Cooperative guidance for aerial defense in multiagent systems,
S. Bajpai, A. Sinha, and S. R. Kumar, “Cooperative guidance for aerial defense in multiagent systems,”IEEE Transactions on Aerospace and Electronic Systems, vol. 62, pp. 3700–3710, 2026
2026
-
[24]
True proportional navigation with maneuvering target,
D. Ghose, “True proportional navigation with maneuvering target,”IEEE Transactions on Aerospace and Electronic Systems, vol. 30, no. 1, pp. 229–237, 1994
1994
-
[25]
True-proportional-navigation in- spired finite-time homing guidance for time constrained interception,
S. R. Kumar and D. Mukherjee, “True-proportional-navigation in- spired finite-time homing guidance for time constrained interception,” Aerospace Science and Technology, vol. 123, p. 107499, 2022
2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.