Deterministic Execution of ROS 2 Applications via Lingua Franca
Pith reviewed 2026-06-27 16:27 UTC · model grok-4.3
The pith
ROS 2 applications can be automatically converted to run with deterministic callback order under Lingua Franca logical time.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By mapping selected ROS 2 features to Lingua Franca constructs that enforce logical-time ordering, an unmodified ROS 2 application can be made to produce identical callback sequences on every run of the same input, as verified on both a synthetic case and the Autoware reference system where default ROS 2 exhibited varying orders and latencies while the LF version did not.
What carries the argument
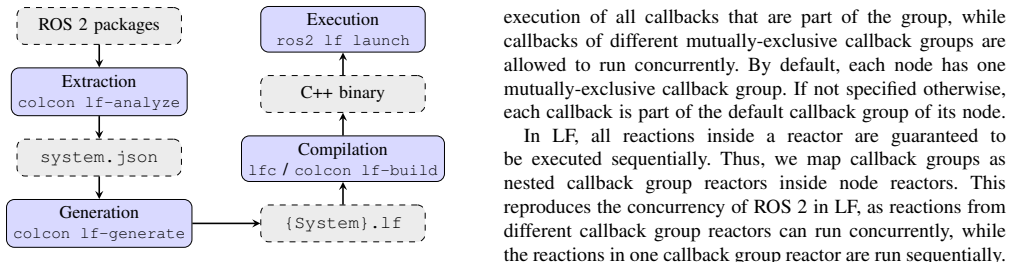
The automatic conversion framework that extracts callback and topic structure from ROS 2 and emits an equivalent LF program while preserving observable behavior.
If this is right
- Identical inputs produce identical execution orders.
- End-to-end latencies remain consistent across runs.
- Logical-time delays and fault handling from LF can be added to the original ROS 2 code.
- Federated execution across processes becomes available while keeping the ROS 2 interface unchanged.
Where Pith is reading between the lines
- Safety analysis techniques that assume deterministic ordering could now be applied directly to converted ROS 2 systems.
- The same conversion pattern might be tested on other pub-sub robotics frameworks to check generality.
- Distributed deployments could gain timing predictability by using LF federation on top of the converted nodes.
Load-bearing premise
Typical ROS 2 applications use only features that map cleanly to deterministic logical-time execution without loss of required semantics.
What would settle it
Execute the converted LF version of the Autoware reference system on repeated identical inputs and record differing callback execution orders across runs.
Figures

read the original abstract
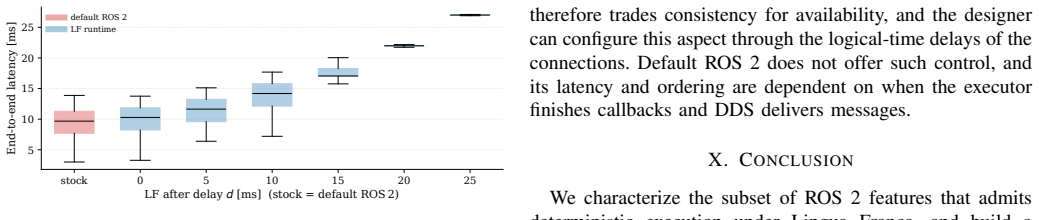
The Robot Operating System 2 (ROS 2) is a widely used middleware for robotic systems, characterized by a publish-subscribe (pub-sub) communication mechanism in which computation is structured as callbacks dispatched by ROS 2 executors. Despite its popularity, the pub-sub pattern in ROS 2 is inherently nondeterministic: the order in which these callbacks run is nondeterministic even within a single executor, and distributed deployments add further nondeterminism from the interleaving of messages across nodes and from network latency. Such nondeterminism often leads to concurrency issues and makes it virtually impossible to analyze for safeness and provide guarantees. We present a framework that is able to convert an unmodified ROS 2 application and run it under Lingua Franca (LF), a coordination language for deterministic execution using logical time, so that the same input always produces the same deterministic execution order. We first describe which ROS 2 features can be executed deterministically under logical time. Such features enable the possibility to establish an automatic conversion framework to extract information from a ROS 2 application and directly convert it into an LF program. The rich features of LF, such as logical-time delays, federated execution across processes, and fault handling, can then be applied to make the ROS 2 application be executed in a deterministic and timing-predictable manner without changing the ROS 2 code. We evaluate the framework on a synthetic example and on the Autoware reference system. We show that the order in which callbacks are executed differs in default ROS 2, while also having end-to-end latencies that vary across executions. In contrast, our LF-controlled ROS 2 system produces a deterministic execution order and consistent end-to-end latencies.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims to provide a framework that converts unmodified ROS 2 applications into Lingua Franca (LF) programs for deterministic execution under logical time. It first enumerates a supported subset of ROS 2 features (publishers, subscribers, timers, and limited service/action patterns) that admit deterministic mapping, describes an automatic source-to-source transformation that emits LF reactors, and evaluates the result on a synthetic example plus the Autoware reference system, reporting that LF yields identical callback ordering and end-to-end latencies across runs while default ROS 2 exhibits nondeterministic ordering and variable latencies.
Significance. If the mapping and transformation preserve callback semantics for the supported subset, the work would allow existing ROS 2 codebases to obtain LF's logical-time guarantees, federated execution, and fault handling without source changes. The concrete evaluation on the Autoware reference system supplies direct evidence that the construction applies to a complex, production-grade system and produces the claimed determinism.
minor comments (2)
- The evaluation section reports only qualitative outcomes (deterministic order, consistent latencies) without quantitative details such as the number of runs performed, measured latency statistics, or explicit comparison tables; adding these would allow readers to assess the magnitude of improvement over default ROS 2.
- The description of the automatic conversion would benefit from a short table or diagram summarizing the exact ROS 2-to-LF reactor mapping for each supported feature (publishers, timers, etc.) to improve clarity of the transformation rules.
Simulated Author's Rebuttal
We thank the referee for the positive summary, significance assessment, and recommendation of minor revision. No major comments were listed in the report, so we have no specific points requiring point-by-point rebuttal or changes at this stage. We remain available to incorporate any additional minor suggestions from the editor.
Circularity Check
No significant circularity identified
full rationale
The paper presents a source-to-source conversion framework that maps a supported subset of ROS 2 features (publishers, subscribers, timers, limited services/actions) onto Lingua Franca reactors whose logical-time semantics replace the nondeterministic ROS 2 executor. The derivation consists of an explicit feature enumeration followed by a concrete transformation rule set and direct empirical validation on both synthetic cases and the Autoware reference system; end-to-end outputs and callback ordering are shown to become deterministic under the LF schedule. No equations, fitted parameters, or predictions are involved, and no load-bearing claim reduces to a self-citation or self-definition. The construction is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Certain ROS 2 features can be executed deterministically under logical time without altering application semantics.
Reference graph
Works this paper leans on
-
[1]
Autoware reference system, 2026
Autoware Foundation. Autoware reference system, 2026. https://github.com/ros-realtime/reference-system, Last Accessed: 2026-05-26
2026
-
[2]
Bateni, M
S. Bateni, M. Lohstroh, H. S. Wong, H. Kim, S. Lin, C. Menard, and E. A. Lee. Risk and mitigation of nondeterminism in distributed cyber-physical systems. In21st ACM/IEEE International Symposium on Formal Methods and Models for System Design (MEMOCODE), pages 1–11, 2023
2023
-
[3]
Benveniste, P
A. Benveniste, P. Caspi, S. Edwards, N. Halbwachs, P. Le Guernic, and R. de Simone. The synchronous languages 12 years later.Proceedings of the IEEE, 91(1):64–83, 2003
2003
-
[4]
T. Blaß, D. Casini, S. Bozhko, and B. B. Brandenburg. A ROS 2 response-time analysis exploiting starvation freedom and execution-time variance. In2021 IEEE Real-Time Systems Symposium (RTSS), pages 41–53, 2021
2021
-
[5]
T. Blaß, A. Hamann, R. Lange, D. Ziegenbein, and B. B. Brandenburg. Automatic latency management for ROS 2: Benefits, challenges, and open problems. In27th Real-Time and Embedded Technology and Applications Symposium (RTAS), pages 264–277. IEEE, 2021
2021
-
[6]
Casini, T
D. Casini, T. Blaß, I. Lütkebohle, and B. B. Brandenburg. Response- Time Analysis of ROS 2 Processing Chains Under Reservation-Based Scheduling. In S. Quinton, editor,31st Euromicro Conference on Real- Time Systems (ECRTS 2019), volume 133 ofLeibniz International Pro- ceedings in Informatics (LIPIcs), pages 6:1–6:23, Dagstuhl, Germany,
2019
-
[7]
Schloss Dagstuhl – Leibniz-Zentrum für Informatik
-
[8]
Casini, J.-J
D. Casini, J.-J. Chen, J. Li, F. Reghenzani, and H. Teper. A Survey of Real-Time Support, Analysis, and Advancements in ROS 2.Leibniz Transactions on Embedded Systems, 11(1):1:1–1:37, 2026
2026
-
[9]
H. Choi, Y . Xiang, and H. Kim. Picas: New design of priority-driven chain-aware scheduling for ros2. In2021 IEEE 27th Real-Time and Embedded Technology and Applications Symposium (RTAS), pages 251–
-
[10]
Halbwachs, P
N. Halbwachs, P. Caspi, P. Raymond, and D. Pilaud. The synchronous data flow programming language lustre.Proceedings of the IEEE, 79(9):1305–1320, 1991
1991
-
[11]
W. K. Huang, Y . Terazawa, Y . Matsubara, and A. Iwai. Software-defined vehicles: Challenges and orchestrating mixed-criticality services using Lingua Franca.IEEE Embedded Systems Letters, 2025
2025
-
[12]
S. Kato, S. Tokunaga, Y . Maruyama, S. Maeda, M. Hirabayashi, Y . Kit- sukawa, A. Monrroy, T. Ando, Y . Fujii, and T. Azumi. Autoware on board: Enabling autonomous vehicles with embedded systems. In2018 ACM/IEEE 9th International Conference on Cyber-Physical Systems (ICCPS), pages 287–296. IEEE, 2018
2018
-
[13]
J. Kwok, S. Li, M. Lohstroh, and E. A. Lee. HPRM: High-performance robotic middleware for intelligent autonomous systems. InIEEE International Conference on Robotics and Automation (ICRA), pages 8093–8099, 2025
2025
-
[14]
Lee and D
E. Lee and D. Messerschmitt. Synchronous data flow.Proceedings of the IEEE, 75(9):1235–1245, 1987
1987
-
[15]
Lee and T
E. Lee and T. Parks. Dataflow process networks.Proceedings of the IEEE, 83(5):773–801, 05 1995
1995
-
[16]
E. A. Lee, R. Akella, S. Bateni, S. Lin, M. Lohstroh, and C. Menard. Consistency vs. availability in distributed cyber-physical systems.ACM Trans. Embed. Comput. Syst., 22(5s):138:1–138:24, Sept. 2023
2023
-
[17]
E. A. Lee, S. Bateni, S. Lin, M. Lohstroh, and C. Menard. Quantifying and generalizing the CAP theorem.arXiv, abs/2109.07771, 2021
arXiv 2021
-
[18]
Lingua Franca coordination language, 2026
Lingua Franca Project. Lingua Franca coordination language, 2026. https://github.com/lf-lang/lingua-franca, Version 0.12.1, Last Accessed: 2026-05-26
2026
-
[19]
Playground for the Lingua Franca coordi- nation language, 2026
Lingua Franca Project. Playground for the Lingua Franca coordi- nation language, 2026. https://github.com/lf-lang/playground-lingua- franca, Last Accessed: 2026-05-26
2026
-
[20]
S. Liu, X. Jiang, N. Guan, Z. Wang, M. Yu, and W. Yi. Rtex: An efficient and timing-predictable multithreaded executor for ROS 2.IEEE Transactions on Computer-Aided Design of Integrated Circuits and Systems, 43(9):2578–2591, 2024
2024
-
[21]
Lohstroh, C
M. Lohstroh, C. Menard, S. Bateni, and E. A. Lee. Toward a lingua franca for deterministic concurrent systems.ACM Trans. Embed. Comput. Syst., 20(4):36:1–36:27, 2021
2021
-
[22]
Lohstroh, Í
M. Lohstroh, Í. Í. Romeo, A. Goens, P. Derler, J. Castrillón, E. A. Lee, and A. L. Sangiovanni-Vincentelli. Reactors: A deterministic model for composable reactive systems. In R. Chamberlain, M. Edin Grimheden, and W. Taha, editors,Cyber Physical Systems. Model-Based Design, pages 59–85, Cham, 2020. Springer International Publishing
2020
-
[23]
Macenski, T
S. Macenski, T. Foote, B. P. Gerkey, C. Lalancette, and W. Woodall. Robot Operating System 2: Design, architecture, and uses in the wild. Science Robotics, 7(66):eabm6074, 2022
2022
-
[24]
Menard, M
C. Menard, M. Lohstroh, S. Bateni, M. Chorlian, A. Deng, P. Donovan, C. Fournier, S. Lin, F. Suchert, T. Tanneberger, H. Kim, J. Castrillón, and E. A. Lee. High-performance deterministic concurrency using lingua franca.ACM Transactions on Architecture and Code Optimization, 20(4):48:1–48:29, 2023
2023
-
[25]
Data distribution service (DDS) specifica- tion, version 1.4
Object Management Group. Data distribution service (DDS) specifica- tion, version 1.4. Technical report, Object Management Group, 2015
2015
-
[26]
ROS 2: Robot operating system 2, 2026
Open Robotics. ROS 2: Robot operating system 2, 2026
2026
-
[27]
S. Sagmeister, M. Weinmann, P. Pitschi, and M. Lienkamp. RSLCPP – deterministic simulations using ROS 2, 2026. https://arxiv.org/abs/2601.07052
Pith/arXiv arXiv 2026
-
[28]
Y . Tang, N. Guan, X. Jiang, X. Luo, and W. Yi. Real-time performance analysis of processing systems on ros 2 executors. In2023 IEEE 29th Real-Time and Embedded Technology and Applications Symposium (RTAS), pages 80–92. IEEE, 2023
2023
-
[29]
Y . Tang, X. Jiang, N. Guan, X. Luo, M. Yang, and W. Yi. Timing analysis of processing chains with data refreshing in ros 2.Journal of Systems Architecture, 155:103259, 2024
2024
-
[30]
Teper, O
H. Teper, O. Bell, M. Günzel, C. Gill, and J.-J. Chen. Reconciling ROS 2 with classical real-time scheduling of periodic tasks. In31st Real-Time and Embedded Technology and Applications Symposium (RTAS), pages 177–189. IEEE, 2025
2025
-
[31]
Teper, T
H. Teper, T. Betz, M. Günzel, D. Ebner, G. V on Der Brüggen, J. Betz, and J.-J. Chen. End-to-end timing analysis and optimization of multi- executor ROS 2 systems. In2024 IEEE 30th Real-Time and Embedded Technology and Applications Symposium (RTAS), pages 212–224, 2024
2024
-
[32]
Teper, T
H. Teper, T. Betz, G. V on Der Brüggen, K.-H. Chen, J. Betz, and J.-J. Chen. Timing-aware ROS 2 architecture and system optimization. In 29th International Conference on Embedded and Real-Time Computing Systems and Applications (RTCSA), pages 206–215. IEEE, 2023
2023
-
[33]
Teper, M
H. Teper, M. Günzel, N. Ueter, G. von der Brüggen, and J.-J. Chen. End-to-end timing analysis in ROS 2. In2022 IEEE Real-Time Systems Symposium (RTSS), pages 53–65, 2022. 12
2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.