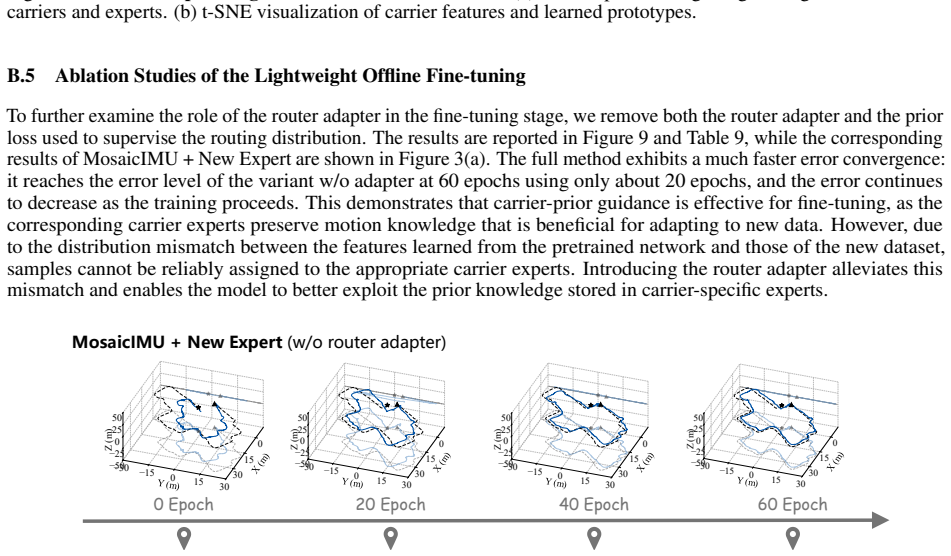
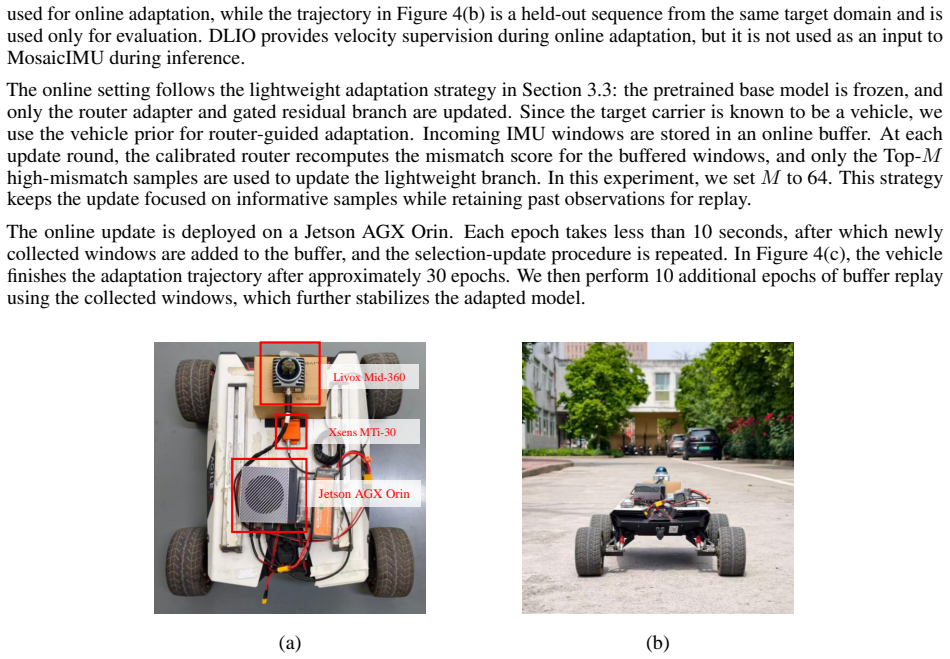
MosaicIMU: Composing Carrier Experts for Generalizable Neural Inertial Odometry
Pith reviewed 2026-06-27 16:23 UTC · model grok-4.3
The pith
MosaicIMU composes carrier-specific experts via a prototype router for generalizable neural inertial odometry.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
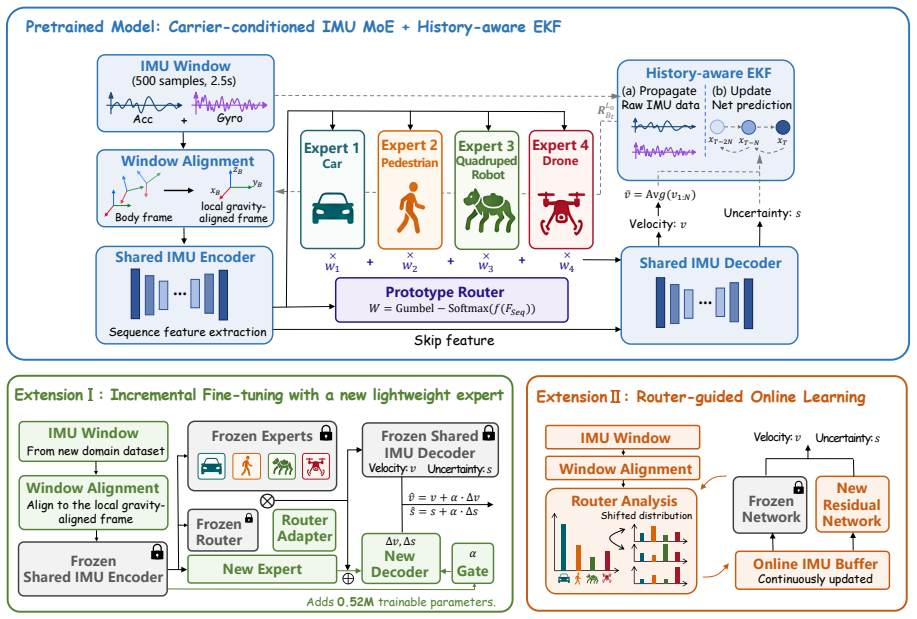
MosaicIMU is a carrier-conditioned Mixture-of-Experts (MoE) pretraining-and-adaptation framework for generalizable neural inertial odometry that uses a prototype-based router to compose carrier-specific expert features, decodes local velocity and uncertainty constraints, integrates them with a history-aware EKF, and adapts to unseen domains by learning a new lightweight expert residual branch while freezing the pretrained base model.
What carries the argument
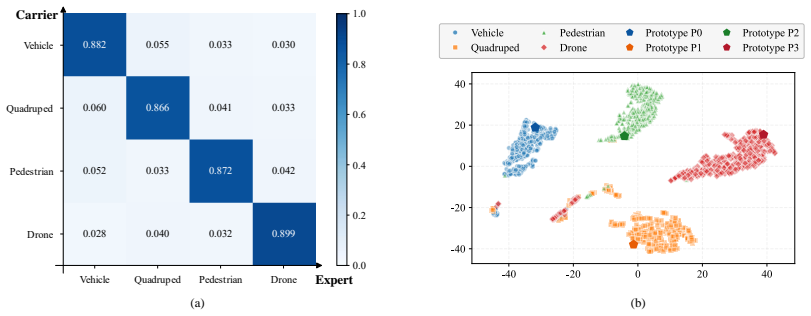
The prototype-based router in the carrier-conditioned MoE that composes carrier-specific expert features for velocity and uncertainty decoding.
If this is right
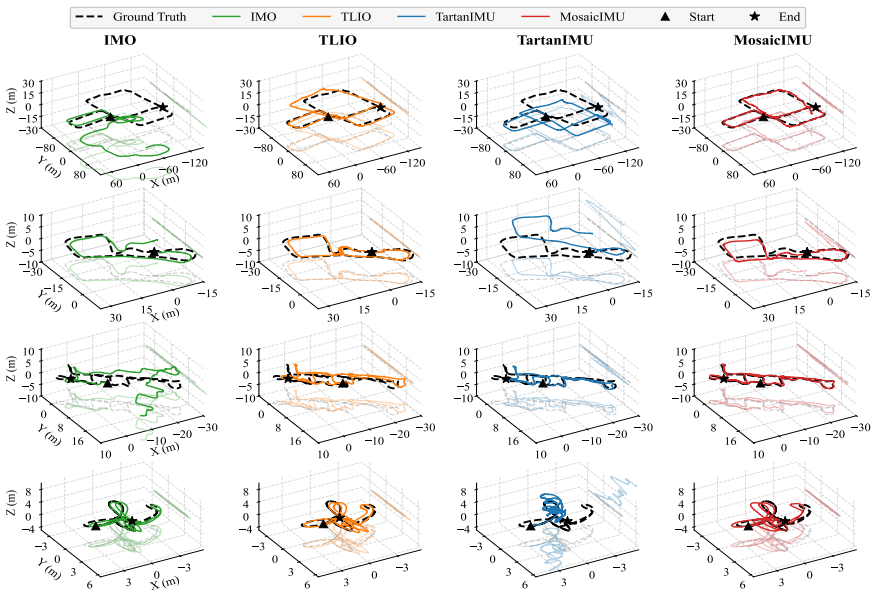
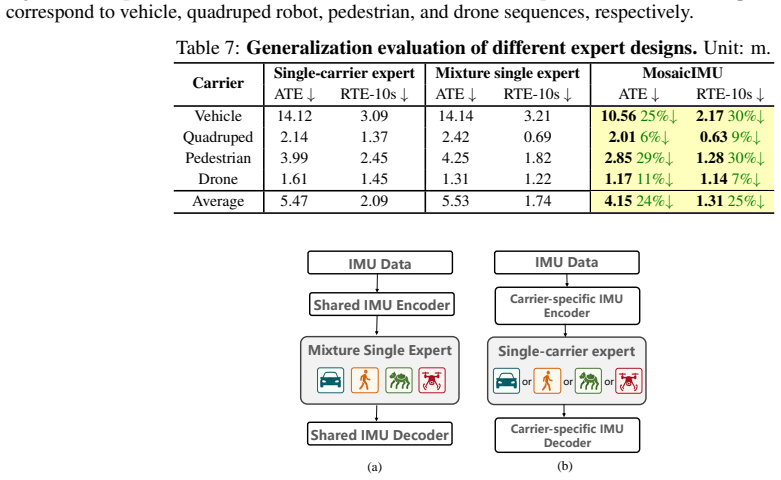
- It consistently outperforms learning-based baselines with 40% reduction in average ATE and 34% in RTE-10s.
- It enables generalization to unseen carriers through lightweight residual expert adaptation.
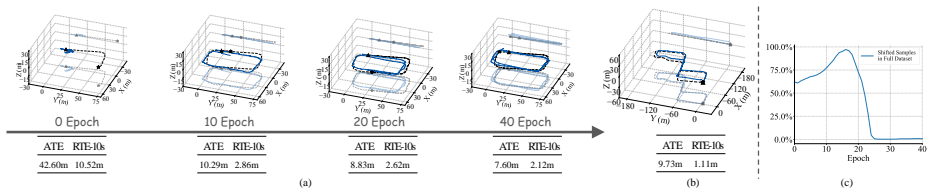
- It supports efficient edge-deployment by reusing the router to select informative online samples for incremental updates.
- It provides a scalable pretraining-to-deployment paradigm for adaptive neural inertial odometry across heterogeneous platforms.
Where Pith is reading between the lines
- The router-based composition could potentially apply to other robotics tasks requiring adaptation across different hardware platforms.
- Future work might test whether the same MoE structure improves generalization in visual odometry or other sensor fusion methods.
- Carriers with dynamics far outside the training distribution might require more than a residual branch to achieve similar gains.
Load-bearing premise
The prototype-based router can effectively compose carrier-specific expert features to enable generalization to unseen carriers through lightweight residual expert adaptation.
What would settle it
A test on a new carrier where the adapted model shows no improvement over a non-adapted baseline or over single-carrier trained models would indicate the composition does not generalize as claimed.
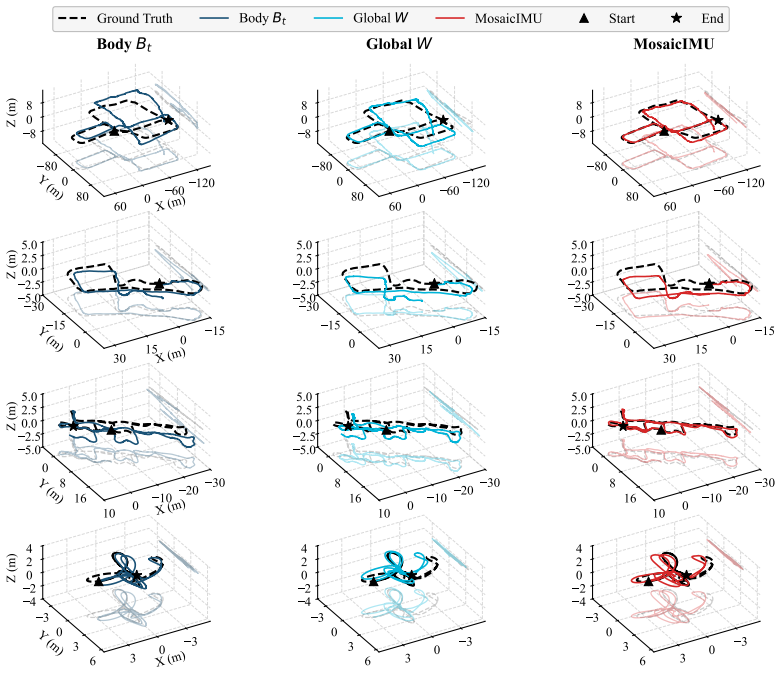
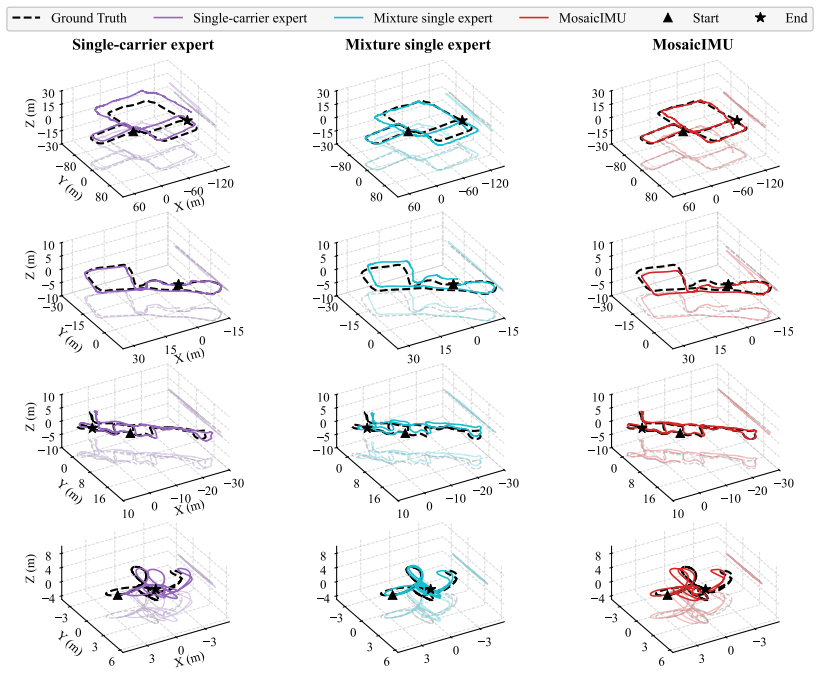
Figures
read the original abstract
Robust inertial odometry is essential for various carriers when external sensing is unreliable. Learning-based methods reduce integration drift by capturing local motion priors, but these methods often remain tied to a particular carrier, limiting generalization across heterogeneous platforms. We present MosaicIMU, a carrier-conditioned Mixture-of-Experts (MoE) pretraining-and-adaptation framework for generalizable neural inertial odometry. MosaicIMU uses a prototype-based router to compose carrier-specific expert features, decodes local velocity and uncertainty constraints, and integrates them with a history-aware EKF. For unseen domain adaptation, it freezes the pretrained base model and learns a new lightweight expert residual branch. For edge-deployment, it further reuses the router to select informative online samples for efficient incremental updates. Experiments show that MosaicIMU consistently outperforms learning-based baselines, reducing average ATE and RTE-10s by 40% and 34%, respectively. These results highlight that MosaicIMU provides a scalable pretraining-to-deployment paradigm for generalizable and adaptive neural inertial odometry.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces MosaicIMU, a carrier-conditioned Mixture-of-Experts (MoE) pretraining-and-adaptation framework for generalizable neural inertial odometry. It employs a prototype-based router to compose carrier-specific expert features, decodes local velocity and uncertainty constraints, and integrates them via a history-aware EKF. For unseen carriers, the pretrained base is frozen while a lightweight residual expert branch is learned; the router is further reused for online sample selection during incremental edge updates. Experiments report consistent outperformance over learning-based baselines, with average reductions of 40% in ATE and 34% in RTE-10s.
Significance. If the reported gains hold under rigorous cross-carrier evaluation, the work supplies a practical pretraining-to-deployment pipeline that reduces the need for full retraining when moving across heterogeneous platforms. This addresses a recurring limitation in learning-based inertial odometry and could support more scalable deployment in robotics settings where external sensing is unreliable.
minor comments (2)
- [Abstract] Abstract: the performance numbers (40% ATE, 34% RTE-10s) are stated without any accompanying reference to the number of carriers, data splits, or baseline methods; while the full text supplies these details, a one-sentence qualifier in the abstract would improve readability for readers who stop at the summary.
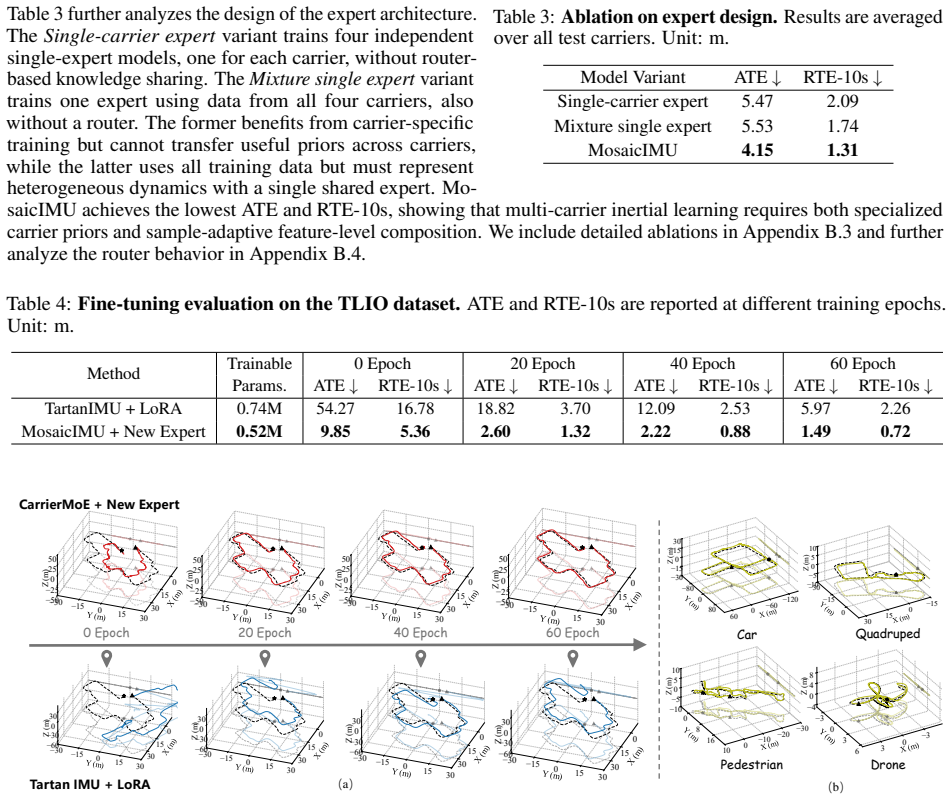
- The description of the prototype-based router and the lightweight residual branch would benefit from an explicit statement of the number of parameters introduced by the residual branch relative to the frozen base model.
Simulated Author's Rebuttal
We thank the referee for the positive summary of our work and the recommendation for minor revision. The assessment correctly captures the core contributions of the carrier-conditioned MoE framework, the adaptation strategy for unseen carriers, and the reported performance gains. No major comments were provided in the report.
Circularity Check
No significant circularity detected
full rationale
The paper is an empirical ML systems contribution describing a carrier-conditioned MoE pretraining framework, prototype router, velocity/uncertainty decoder, history-aware EKF, and lightweight residual adaptation for unseen carriers. No equations, first-principles derivations, or predictions are presented in the abstract or architecture description. Performance numbers (ATE/RTE reductions) are reported from experiments and are not claimed to follow from any internal mathematical identity or self-referential fit. No self-citation load-bearing steps, ansatzes, or uniqueness theorems appear. The central claims rest on external experimental validation rather than any reduction to the paper's own inputs by construction.
Axiom & Free-Parameter Ledger
invented entities (2)
-
prototype-based router
no independent evidence
-
lightweight expert residual branch
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Khairi, and Vijayabaskar Kasi
Norhafizan Ahmad, Raja Ariffin Raja Ghazilla, Nazirah M. Khairi, and Vijayabaskar Kasi. Reviews on various inertial measurement unit (IMU) sensor applications.International Journal of Signal Processing Systems, 1(2):256–262, 2013
2013
-
[2]
Super odometry: IMU-centric LiDAR-visual-inertial estimator for challenging environments
Shibo Zhao, Hengrui Zhang, Peng Wang, Lucas Nogueira, and Sebastian Scherer. Super odometry: IMU-centric LiDAR-visual-inertial estimator for challenging environments. In2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 8729–8736. IEEE, 2021
2021
-
[3]
Hol, and Thomas B
Manon Kok, Jeroen D. Hol, and Thomas B. Schön. Using inertial sensors for position and orientation estimation. Foundations and Trends in Signal Processing, 11(1–2):1–153, 2017
2017
-
[4]
IONet: Learning to cure the curse of drift in inertial odometry
Changhao Chen, Xiaoxuan Lu, Andrew Markham, and Niki Trigoni. IONet: Learning to cure the curse of drift in inertial odometry. InProceedings of the AAAI Conference on Artificial Intelligence, volume 32, pages 6468–6476, 2018
2018
-
[5]
MotionTransformer: Transferring neural inertial tracking between domains
Changhao Chen, Yishu Miao, Chris Xiaoxuan Lu, Linhai Xie, Phil Blunsom, Andrew Markham, and Niki Trigoni. MotionTransformer: Transferring neural inertial tracking between domains. InProceedings of the AAAI Conference on Artificial Intelligence, volume 33, pages 8009–8016, 2019
2019
-
[6]
Mourikis, Kostas Daniilidis, Vijay Kumar, and Jakob Engel
Wenxin Liu, David Caruso, Eddy Ilg, Jing Dong, Anastasios I. Mourikis, Kostas Daniilidis, Vijay Kumar, and Jakob Engel. TLIO: Tight learned inertial odometry.IEEE Robotics and Automation Letters, 5(4):5653–5660, 2020
2020
-
[7]
AI-IMU dead-reckoning.IEEE Transactions on Intelligent Vehicles, 5(4):585–595, 2020
Martin Brossard, Axel Barrau, and Silvère Bonnabel. AI-IMU dead-reckoning.IEEE Transactions on Intelligent Vehicles, 5(4):585–595, 2020
2020
-
[8]
MTNet: A multitask learning framework for inertial odometry on vehicles.IEEE Transactions on Industrial Electronics, 73(4):5884–5894, 2026
Junye Zou, Xiaolei Li, Pengfei Gu, Xu Lyu, and Ziyang Meng. MTNet: A multitask learning framework for inertial odometry on vehicles.IEEE Transactions on Industrial Electronics, 73(4):5884–5894, 2026
2026
-
[9]
RoNIN: Robust neural inertial navigation in the wild: Benchmark, evaluations, and new methods
Sachini Herath, Hang Yan, and Yasutaka Furukawa. RoNIN: Robust neural inertial navigation in the wild: Benchmark, evaluations, and new methods. In2020 IEEE International Conference on Robotics and Automation (ICRA), pages 3146–3152. IEEE, 2020
2020
-
[10]
Deep IMU bias inference for robust visual-inertial odometry with factor graphs.IEEE Robotics and Automation Letters, 8(1):41–48, 2022
Russell Buchanan, Varun Agrawal, Marco Camurri, Frank Dellaert, and Maurice Fallon. Deep IMU bias inference for robust visual-inertial odometry with factor graphs.IEEE Robotics and Automation Letters, 8(1):41–48, 2022
2022
-
[11]
Learned inertial odometry for autonomous drone racing.IEEE Robotics and Automation Letters, 8(5):2684–2691, 2023
Giovanni Cioffi, Leonard Bauersfeld, Elia Kaufmann, and Davide Scaramuzza. Learned inertial odometry for autonomous drone racing.IEEE Robotics and Automation Letters, 8(5):2684–2691, 2023
2023
-
[12]
AirIO: Learning inertial odometry with enhanced IMU feature observability.IEEE Robotics and Automation Letters, 10(9):9368–9375, 2025
Yuheng Qiu, Can Xu, Yutian Chen, Shibo Zhao, Junyi Geng, and Sebastian Scherer. AirIO: Learning inertial odometry with enhanced IMU feature observability.IEEE Robotics and Automation Letters, 10(9):9368–9375, 2025
2025
-
[13]
Tartan IMU: A light foundation model for inertial positioning in robotics
Shibo Zhao, Sifan Zhou, Raphael Blanchard, Yuheng Qiu, Wenshan Wang, and Sebastian Scherer. Tartan IMU: A light foundation model for inertial positioning in robotics. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 22520–22529, 2025
2025
-
[14]
AbolDeepIO: A novel deep inertial odometry network for autonomous vehicles.IEEE Transactions on Intelligent Transportation Systems, 21(5):1941–1950, 2020
Mahdi Abolfazli Esfahani, Han Wang, Keyu Wu, and Shenghai Yuan. AbolDeepIO: A novel deep inertial odometry network for autonomous vehicles.IEEE Transactions on Intelligent Transportation Systems, 21(5):1941–1950, 2020
1941
-
[15]
Siddiqui, Michael Philippsen, and Christopher Mutschler
Tobias Feigl, Sebastian Kram, Philipp Woller, Ramiz H. Siddiqui, Michael Philippsen, and Christopher Mutschler. A bidirectional LSTM for estimating dynamic human velocities from a single IMU. In2019 International Conference on Indoor Positioning and Indoor Navigation (IPIN), pages 1–8. IEEE, 2019
2019
-
[16]
Calib-Net: Calibrating the low-cost IMU via deep convolutional neural network.Frontiers in Robotics and AI, 8:772583, 2022
Ruihao Li, Chunlian Fu, Wei Yi, and Xiaodong Yi. Calib-Net: Calibrating the low-cost IMU via deep convolutional neural network.Frontiers in Robotics and AI, 8:772583, 2022
2022
-
[17]
Smartphone-based pedestrian inertial tracking: Dataset, model, and deployment.IEEE Transactions on Instrumentation and Measurement, 73:1–13, 2024
Feng Liu, Hongyu Ge, Dan Tao, Ruipeng Gao, and Zhang Zhang. Smartphone-based pedestrian inertial tracking: Dataset, model, and deployment.IEEE Transactions on Instrumentation and Measurement, 73:1–13, 2024. 9
2024
-
[18]
Shila, Frank M
Bingbing Rao, Ehsan Kazemi, Yifan Ding, Devu M. Shila, Frank M. Tucker, and Liqiang Wang. CTIN: Robust contextual transformer network for inertial navigation. InProceedings of the AAAI Conference on Artificial Intelligence, volume 36, pages 5413–5421, 2022
2022
-
[19]
EqNIO: Subequivariant neural inertial odometry
Royina Karegoudra Jayanth, Yinshuang Xu, Ziyun Wang, Evangelos Chatzipantazis, Daniel Gehrig, and Kostas Daniilidis. EqNIO: Subequivariant neural inertial odometry. InInternational Conference on Learning Representa- tions (ICLR), 2025
2025
-
[20]
Learning yaw velocity for inertial-wheel odometry on autonomous vehicles.IEEE Transactions on Intelligent Vehicles, 10(5):3517–3530, 2024
Pengkun Zhou, Pengfei Gu, Xu Lyu, Maoyou Liao, and Ziyang Meng. Learning yaw velocity for inertial-wheel odometry on autonomous vehicles.IEEE Transactions on Intelligent Vehicles, 10(5):3517–3530, 2024
2024
-
[21]
Learning inertial odometry for dynamic legged robot state estimation
Russell Buchanan, Marco Camurri, Frank Dellaert, and Maurice Fallon. Learning inertial odometry for dynamic legged robot state estimation. InProceedings of the Conference on Robot Learning (CoRL), pages 1575–1584. PMLR, 2022
2022
-
[22]
RNIN-VIO: Robust neural inertial navigation aided visual-inertial odometry in challenging scenes
Danpeng Chen, Nan Wang, Runsen Xu, Weijian Xie, Hujun Bao, and Guofeng Zhang. RNIN-VIO: Robust neural inertial navigation aided visual-inertial odometry in challenging scenes. In2021 IEEE International Symposium on Mixed and Augmented Reality (ISMAR), pages 275–283. IEEE, 2021
2021
-
[23]
Roumeliotis and Joel W
Stergios I. Roumeliotis and Joel W. Burdick. Stochastic cloning: A generalized framework for processing relative state measurements. InProceedings 2002 IEEE International Conference on Robotics and Automation (ICRA), volume 2, pages 1788–1795. IEEE, 2002
2002
-
[24]
Mourikis and Stergios I
Anastasios I. Mourikis and Stergios I. Roumeliotis. A multi-state constraint Kalman filter for vision-aided inertial navigation. InProceedings 2007 IEEE International Conference on Robotics and Automation (ICRA), pages 3565–3572. IEEE, 2007
2007
-
[25]
Hu, Yelong Shen, Phillip Wallis, Zeyuan Allen-Zhu, Yuanzhi Li, Shean Wang, Lu Wang, and Weizhu Chen
Edward J. Hu, Yelong Shen, Phillip Wallis, Zeyuan Allen-Zhu, Yuanzhi Li, Shean Wang, Lu Wang, and Weizhu Chen. LoRA: Low-rank adaptation of large language models. InInternational Conference on Learning Represen- tations (ICLR), 2022
2022
-
[26]
Jiwon Choi, Hogyun Kim, Geonmo Yang, Juhui Lee, and Younggun Cho. KISS-IMU: Self-supervised inertial odometry with motion-balanced learning and uncertainty-aware inference.arXiv preprint arXiv:2603.06205, 2026
arXiv 2026
-
[27]
Adaptive VIO: Deep visual-inertial odometry with online continual learning
Youqi Pan, Wugen Zhou, Yingdian Cao, and Hongbin Zha. Adaptive VIO: Deep visual-inertial odometry with online continual learning. In2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 18019–18028. IEEE, 2024
2024
-
[28]
Kenny Chen, Ryan Nemiroff, and Brett T. Lopez. Direct LiDAR-inertial odometry: Lightweight LIO with continuous-time motion correction. In2023 IEEE International Conference on Robotics and Automation (ICRA), pages 3983–3989. IEEE, 2023
2023
-
[29]
Hailiang Tang, Tisheng Zhang, Liqiang Wang, Xin Ding, Man Yuan, Zhiyu Xiang, Jujin Chen, Yuhan Bian, Shuangyan Liu, Yuqing Wang, Guan Wang, and Xiaoji Niu. i2Nav-Robot: A large-scale indoor-outdoor robot dataset for multi-sensor fusion navigation and mapping.arXiv preprint arXiv:2508.11485, 2025
arXiv 2025
-
[30]
Whittaker, Ian Higgins, et al
Shibo Zhao, Yuanjun Gao, Tianhao Wu, Damanpreet Singh, Rushan Jiang, Haoxiang Sun, Mansi Sarawata, Yuheng Qiu, William L. Whittaker, Ian Higgins, et al. SubT-MRS dataset: Pushing SLAM towards all-weather environments. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 22647–22657, 2024
2024
-
[31]
CEAR: Comprehensive event camera dataset for rapid perception of agile quadruped robots.IEEE Robotics and Automation Letters, 9(10):8999–9006, 2024
Shifan Zhu, Zixun Xiong, and Donghyun Kim. CEAR: Comprehensive event camera dataset for rapid perception of agile quadruped robots.IEEE Robotics and Automation Letters, 9(10):8999–9006, 2024
2024
-
[32]
Cerberus: Low-drift visual-inertial-leg odometry for agile locomotion
Shuo Yang, Zixin Zhang, Zhengyu Fu, and Zachary Manchester. Cerberus: Low-drift visual-inertial-leg odometry for agile locomotion. In2023 IEEE International Conference on Robotics and Automation (ICRA), pages 4193–4199. IEEE, 2023
2023
-
[33]
IDOL: Inertial deep orientation-estimation and localization
Scott Sun, Dennis Melamed, and Kris Kitani. IDOL: Inertial deep orientation-estimation and localization. In Proceedings of the AAAI Conference on Artificial Intelligence, volume 35, pages 6128–6137, 2021
2021
-
[34]
The Blackbird dataset: A large-scale dataset for UA V perception in aggressive flight
Amado Antonini, Winter Guerra, Varun Murali, Thomas Sayre-McCord, and Sertac Karaman. The Blackbird dataset: A large-scale dataset for UA V perception in aggressive flight. InInternational Symposium on Experimental Robotics (ISER), pages 130–139. Springer, 2018. 10
2018
-
[35]
I6N 0 0 J c 0 A k # ,(29) and the corresponding augmented IMU noise Jacobian is Baug k =
Mohammed Ayman Shalaby, Syed Shabbir Ahmed, Nicholas Dahdah, Charles Champagne Cossette, Jerome Le Ny, and James Richard Forbes. MILUV: A multi-UA V indoor localization dataset with UWB and vision.The International Journal of Robotics Research, page 02783649251405898, 2025. 11 Appendix A Method A.1 Details of Training All models are implemented in PyTorch...
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.