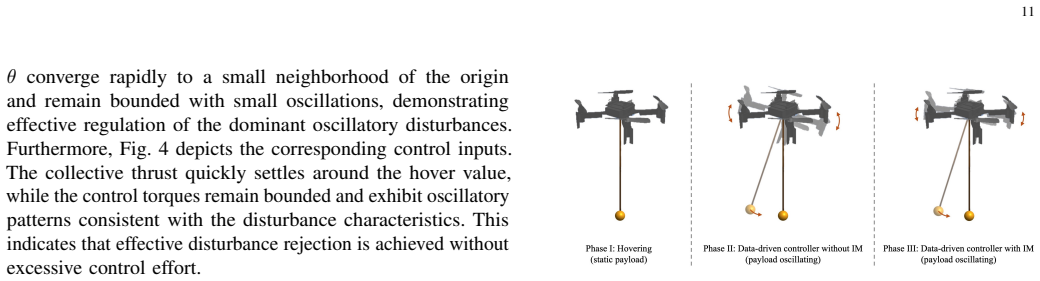
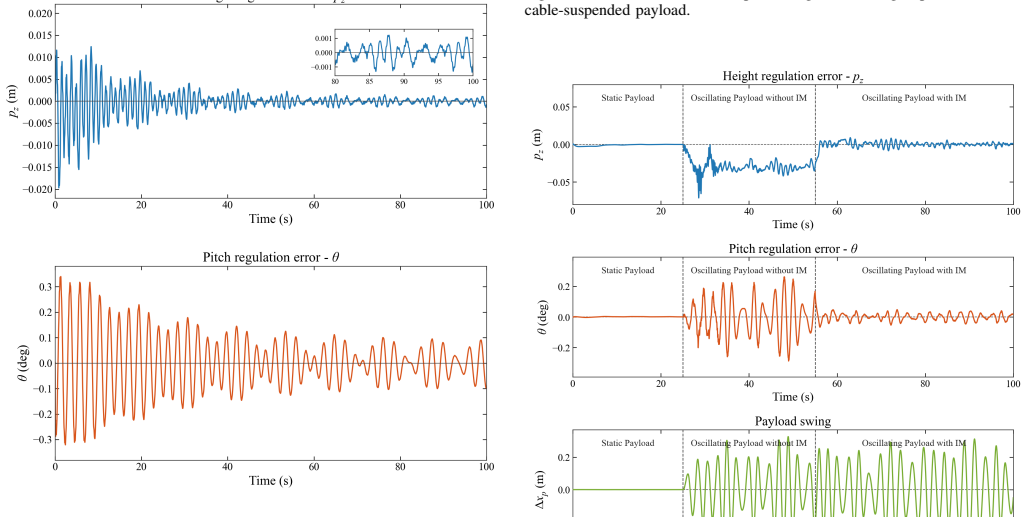
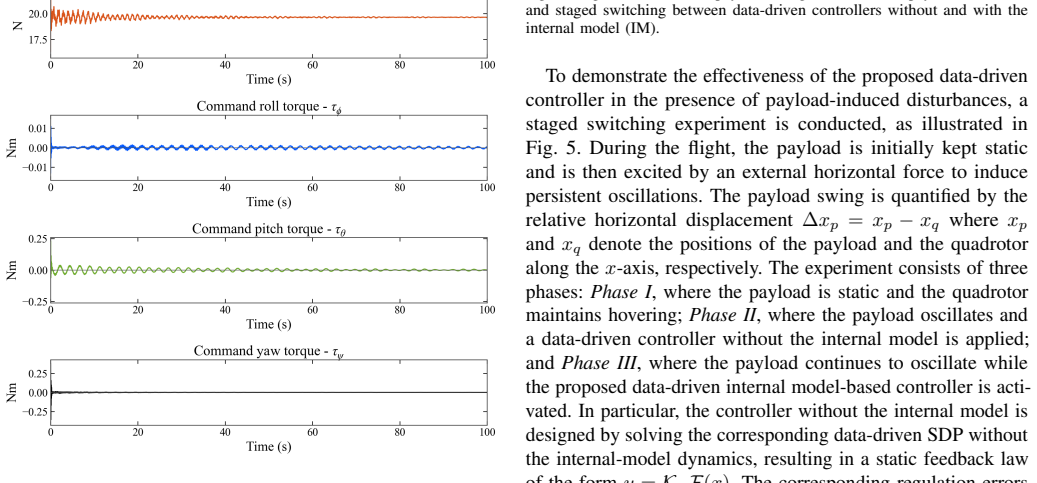
Data-Driven Frequency-Selective Output Regulation of Nonlinear Systems under Almost Periodic Exosignals
Pith reviewed 2026-06-27 05:59 UTC · model grok-4.3
The pith
A data-driven controller with embedded internal model eliminates prescribed frequency components from the steady-state regulation error of unknown nonlinear systems under almost periodic exosignals.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Embedding a p-copy internal model yields an augmented nonlinear system whose unknown constant matrices are expressed directly by measured data; a semidefinite program then synthesizes the controller gain so that the closed-loop vector field is exponentially contractive, which implies existence and uniqueness of a bounded attracting trajectory that is almost periodic, whose regulation error has zero Fourier-Bohr coefficients at the embedded frequencies, and whose residual spectral components obey a Parseval-type time-averaged energy bound.
What carries the argument
The noise-robust semidefinite program that computes the controller gain from input-output data to enforce exponential contractivity of the augmented system containing the p-copy internal model.
If this is right
- The closed-loop system possesses a unique bounded and globally attracting steady-state trajectory on the prescribed operating set.
- The regulation error trajectory is almost periodic and contains none of the embedded exosystem frequencies.
- The time-averaged energy of all unmodeled spectral components of the error is bounded by a quantity derived from the contraction rate and the internal-model dimension.
- The design applies directly to plants whose input, output, and exosignal channels also contain unknown constant matrices.
Where Pith is reading between the lines
- The same contraction-plus-Fourier-Bohr argument might be reused to bound regulation error under exosignals whose frequencies drift slowly within a known band.
- Replacing the fixed nonlinear dictionary with an online-updated one would require only that the semidefinite program be solved periodically while preserving the contraction margin.
- The Parseval-type bound supplies a concrete performance certificate that could be compared against classical internal-model designs once the plant matrices are identified.
Load-bearing premise
The plant dynamics admit a linear parameterization over a prescribed nonlinear dictionary while all coefficient matrices remain unknown constants.
What would settle it
A simulation or experiment in which the closed-loop regulation error exhibits nonzero Fourier-Bohr coefficients at any embedded exosystem frequency, or in which the time-averaged energy of the residual spectrum exceeds the derived bound, would falsify the central claim.
Figures


read the original abstract
This paper studies output regulation for a class of unknown continuous-time nonlinear systems driven by almost periodic exosignals. The plant dynamics are assumed to be linearly parameterized over a prescribed nonlinear dictionary, while all coefficient matrices in the plant, input channel, output map, and exosignal channel are unknown. Since the plant model is unavailable, exact nonlinear output regulation would generally require model identification followed by the solution of nonlinear regulator equations. To avoid these steps, we pursue a frequency-selective regulation objective: the steady-state regulation error is allowed to be almost periodic, but its Fourier-Bohr coefficients at prescribed exosystem frequencies are guaranteed to vanish, and the residual error energy is explicitly bounded. To this end, a p-copy internal model is embedded in a dynamic controller, yielding an augmented nonlinear system whose unknown constant matrices are represented directly by measured data. A noise-robust semidefinite program is derived to synthesize the controller gain without model identification and without measuring the exosignal amplitudes or phases. The resulting closed-loop vector field is made exponentially contractive on a prescribed operating set, which implies the existence and uniqueness of a bounded and attracting trajectory. By combining contraction theory with Fourier-Bohr analysis, we prove that this steady-state trajectory is almost periodic, that the embedded-frequency components of the regulation error are eliminated, and that the unmodeled spectral components satisfy a Parseval-type time-averaged energy bound. Numerical and physics-based simulations on a quadrotor with a cable-suspended payload illustrate the effectiveness of the proposed data-driven internal-model design.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript develops a data-driven frequency-selective output regulation scheme for continuous-time nonlinear plants whose vector fields, input, output, and exosignal maps are each linear in a user-chosen nonlinear dictionary, with all coefficient matrices unknown. A p-copy internal model is embedded in a dynamic controller; measured input-state-output data are substituted directly into a noise-robust SDP whose feasibility certifies exponential contraction of the augmented closed-loop vector field on a prescribed operating set. Contraction theory together with Fourier-Bohr analysis is then invoked to establish existence of a unique bounded attracting trajectory that is almost periodic, whose regulation-error components at the prescribed exosystem frequencies vanish, and whose residual spectral energy satisfies an explicit Parseval-type time-averaged bound. The approach is illustrated on a quadrotor with cable-suspended payload.
Significance. If the central claims hold, the work is significant because it supplies the first data-driven internal-model design that simultaneously guarantees contraction, almost-periodicity of the steady-state error, and selective elimination of known frequencies without requiring model identification or exosignal amplitude/phase measurements. The explicit combination of contraction theory with Fourier-Bohr analysis to obtain a quantitative residual-energy bound, together with the reproducible SDP formulation from data, constitutes a clear technical advance for nonlinear output regulation under almost-periodic disturbances.
major comments (2)
- [Abstract / modeling assumption] Abstract and the modeling assumption stated therein: the entire data-driven SDP construction, the contraction certificate, and the subsequent Fourier-Bohr claims rest on the plant being exactly linearly parameterized over a user-prescribed dictionary whose functional form is known a priori; no robustness margin, dictionary-misspecification bound, or sensitivity result is supplied, rendering the feasibility of the SDP and the contraction property sensitive to this modeling choice.
- [Proof combining contraction theory with Fourier-Bohr analysis] The derivation of the Parseval-type time-averaged energy bound on unmodeled spectral components (the step that converts contraction into the frequency-selective guarantee): the bound is asserted to follow from the contraction rate and the diameter of the operating set, yet the manuscript does not display the explicit dependence of the constant on these quantities or verify that the bound remains useful when the operating set is enlarged to accommodate realistic initial conditions.
minor comments (2)
- The abstract refers to a 'noise-robust semidefinite program' but the precise noise model (additive, multiplicative, bounded-energy, etc.) and the corresponding robustness certificate are not restated in the main text; a short paragraph clarifying the noise assumption would improve readability.
- Notation for the data matrices that replace the unknown coefficient matrices inside the SDP should be introduced once, with a clear mapping to the original plant matrices, to avoid repeated re-definition across sections.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed review. We address each major comment below.
read point-by-point responses
-
Referee: [Abstract / modeling assumption] Abstract and the modeling assumption stated therein: the entire data-driven SDP construction, the contraction certificate, and the subsequent Fourier-Bohr claims rest on the plant being exactly linearly parameterized over a user-prescribed dictionary whose functional form is known a priori; no robustness margin, dictionary-misspecification bound, or sensitivity result is supplied, rendering the feasibility of the SDP and the contraction property sensitive to this modeling choice.
Authors: The manuscript explicitly restricts attention to the class of systems admitting an exact linear parameterization over a user-prescribed dictionary; this modeling choice is stated in the abstract and formalized in Section II. The data-driven SDP and contraction certificate are derived under this exact assumption, which permits direct use of measured data without identification. While a general robustness or sensitivity analysis with respect to dictionary misspecification would be a valuable extension, it lies outside the scope of the present work. In the revised manuscript we will insert a clarifying paragraph in the introduction and conclusions that reiterates the modeling assumption and discusses practical dictionary selection. revision: partial
-
Referee: [Proof combining contraction theory with Fourier-Bohr analysis] The derivation of the Parseval-type time-averaged energy bound on unmodeled spectral components (the step that converts contraction into the frequency-selective guarantee): the bound is asserted to follow from the contraction rate and the diameter of the operating set, yet the manuscript does not display the explicit dependence of the constant on these quantities or verify that the bound remains useful when the operating set is enlarged to accommodate realistic initial conditions.
Authors: We agree that the explicit functional dependence should be displayed. The time-averaged residual-energy bound is obtained by combining the exponential contraction rate λ of the closed-loop vector field with the diameter D of the prescribed operating set, yielding an explicit constant of the form C(λ,D) that appears in the Parseval-type estimate. In the revised version we will state this dependence directly in the statement of the relevant theorem and add a short remark illustrating the scaling of C with respect to larger D, thereby confirming that the bound remains informative for operating sets sized to accommodate realistic initial conditions. revision: yes
Circularity Check
No circularity detected; derivation rests on explicit structural assumption plus standard contraction/Fourier tools
full rationale
The paper states the linear-parameterization assumption explicitly as an input (abstract and Section II). From measured data it constructs an SDP whose feasibility certifies contraction of the augmented closed-loop field on a user-chosen set. Standard contraction theory then yields existence/uniqueness of a bounded attracting trajectory; Fourier-Bohr analysis is applied to that trajectory to obtain the frequency-selective error bounds. None of these steps reduces the claimed conclusions to the inputs by definition or by a fitted parameter renamed as prediction. No self-citation chain is invoked to justify uniqueness or the ansatz. The dictionary choice is acknowledged as user-specified and therefore external to the derivation. The result is therefore self-contained once the modeling assumption is granted.
Axiom & Free-Parameter Ledger
free parameters (3)
- nonlinear dictionary
- prescribed exosystem frequencies
- operating set
axioms (2)
- domain assumption Plant dynamics are linearly parameterized over a prescribed nonlinear dictionary
- domain assumption All coefficient matrices are unknown
Reference graph
Works this paper leans on
-
[1]
Huang,Nonlinear Output Regulation: Theory and Applications
J. Huang,Nonlinear Output Regulation: Theory and Applications. SIAM, 2004
2004
-
[2]
A general framework for tackling the output regulation problem,
J. Huang and Z. Chen, “A general framework for tackling the output regulation problem,”IEEE Trans. Autom. Control, vol. 49, no. 12, pp. 2203–2218, Dec. 2004
2004
-
[3]
A new approach for event-triggered stabilization and output regulation of nonlinear systems,
G. D. Khan, Z. Chen, and L. Zhu, “A new approach for event-triggered stabilization and output regulation of nonlinear systems,”IEEE Trans. Autom. Control, vol. 65, no. 8, pp. 3592–3599, Aug. 2020
2020
-
[4]
Output regulation of linear heterogeneous multi-agent systems via output and state feedback,
F. Adib Yaghmaie, F. L. Lewis, and R. Su, “Output regulation of linear heterogeneous multi-agent systems via output and state feedback,” Automatica, vol. 67, pp. 157–164, May, 2016
2016
-
[5]
A note on persistency of excitation,
J. C. Willems, I. Markovsky, P. Rapisarda, and B. L. M. De Moor, “A note on persistency of excitation,”Syst. Control Lett., vol. 56, no. 4, pp. 325–329, May, 2005
2005
-
[6]
Formulas for data-driven control: Stabilization, optimality, and robustness,
C. De Persis and P. Tesi, “Formulas for data-driven control: Stabilization, optimality, and robustness,”IEEE Trans. Autom. Control, vol. 65, no. 3, pp. 909–924, Dec. 2020
2020
-
[7]
From noisy data to feedback controllers: Nonconservative design via a matrix S-lemma,
H. J. van Waarde, M. K. Camlibel, and M. Mesbahi, “From noisy data to feedback controllers: Nonconservative design via a matrix S-lemma,” IEEE Trans. Autom. Control, vol. 67, no. 1, pp. 162–175, Jan. 2022
2022
-
[8]
Minimum input design for direct data-driven property identification of unknown linear systems,
S. Kang and K. You, “Minimum input design for direct data-driven property identification of unknown linear systems,”Automatica, vol. 156, p. 111130, Oct. 2023
2023
-
[9]
Data-driven mode detection and stabilization of unknown switched linear systems,
J. Eising, S. Liu, S. Mart ´ınez, and J. Cort´es, “Data-driven mode detection and stabilization of unknown switched linear systems,”IEEE Trans. Autom. Control, vol. 70, no. 6, pp. 3830–3845, Jun. 2025
2025
-
[10]
Data-driven control for linear discrete-time delay systems,
J. G. Rueda-Escobedo, E. Fridman, and J. Schiffer, “Data-driven control for linear discrete-time delay systems,”IEEE Trans. Autom. Control, vol. 67, no. 7, pp. 3321–3336, July, 2022
2022
-
[11]
Data-enabled predictive control: In the shallows of the DeePC,
J. Coulson, J. Lygeros, and F. D ¨orfler, “Data-enabled predictive control: In the shallows of the DeePC,” inProc. Eur. Control Conf., Naples, Italy, Italy, June, 25-28 2019, pp. 307–312
2019
-
[12]
Data-driven analysis and controller design for discrete-time systems under aperiodic sampling,
S. Wildhagen, J. Berberich, M. Hertneck, and F. Allg ¨ower, “Data-driven analysis and controller design for discrete-time systems under aperiodic sampling,”IEEE Trans. Autom. Control, vol. 68, no. 6, pp. 3210–3225, June, 2023
2023
-
[13]
Data-driven L2-stability analysis for dynamic event-triggered networked control systems: A hybrid system approach,
W.-L. Qi, K.-Z. Liu, R. Wang, and X.-M. Sun, “Data-driven L2-stability analysis for dynamic event-triggered networked control systems: A hybrid system approach,”IEEE Trans. Ind. Electron., vol. 70, no. 6, pp. 6151– 6158, June, 2023
2023
-
[14]
Data-driven model predictive control with stability and robustness guarantees,
J. Berberich, J. K ¨ohler, M. A. M ¨uller, and F. Allg ¨ower, “Data-driven model predictive control with stability and robustness guarantees,”IEEE Trans. Autom. Control, vol. 66, no. 4, pp. 1702–1717, Apr. 2021
2021
-
[15]
Data informativity for robust output regulation,
L. Zhu and Z. Chen, “Data informativity for robust output regulation,” IEEE Trans. Autom. Control, vol. 69, no. 10, pp. 7075–7080, Oct. 2024
2024
-
[16]
Data-driven control of network systems: Accounting for communication adaptivity and security,
G. Wang, W. Liu, Y . Li, X. Wang, J. Sun, and J. Chen, “Data-driven control of network systems: Accounting for communication adaptivity and security,”Science China Inf. Sci., vol. 69, no. 2, p. 121201, 2026
2026
-
[17]
Localized data-driven consensus control,
Z. Chang, J. Jiao, and Z. Li, “Localized data-driven consensus control,” IEEE Trans. Autom. Control, vol. 70, no. 9, pp. 5628–5643, Sept. 2025
2025
-
[18]
Reinforcement learning and adaptive dynamic programming for feedback control,
F. L. Lewis and D. Vrabie, “Reinforcement learning and adaptive dynamic programming for feedback control,”IEEE Circuits Syst. Mag., vol. 9, no. 3, pp. 32–50, Aug. 2009
2009
-
[19]
Reinforcement learning and feedback control: Using natural decision methods to design optimal adaptive controllers,
F. L. Lewis, D. Vrabie, and K. G. Vamvoudakis, “Reinforcement learning and feedback control: Using natural decision methods to design optimal adaptive controllers,”IEEE Control Syst. Mag., vol. 32, no. 6, pp. 76–105, Dec. 2012
2012
-
[20]
Adaptive dynamic programming and adaptive optimal output regulation of linear systems,
W. Gao and Z.-P. Jiang, “Adaptive dynamic programming and adaptive optimal output regulation of linear systems,”IEEE Trans. Autom. Control, vol. 61, no. 12, pp. 4164–4169, Dec. 2016
2016
-
[21]
Optimal output regulation for general linear systems via adaptive dynamic programming,
Y . Wu, Q. Liang, and J. Hu, “Optimal output regulation for general linear systems via adaptive dynamic programming,”IEEE Trans. Cybern., vol. 52, no. 11, pp. 11 916–11 926, Nov. 2022
2022
-
[22]
Data-driven optimal output regulation for continuous-time linear systems via internal model principle,
L. Lin and J. Huang, “Data-driven optimal output regulation for continuous-time linear systems via internal model principle,”IEEE Trans. Autom. Control, vol. 70, no. 6, pp. 4202–4208, June, 2025
2025
-
[23]
Data-driven harmonic output regulation of a class of nonlinear systems,
Z. Hu, C. De Persis, J. W. Simpson-Porco, and P. Tesi, “Data-driven harmonic output regulation of a class of nonlinear systems,”Syst. & Control Lett., vol. 200, p. 106079, June 2025
2025
-
[24]
Data-driven nonlinear output regulation via data- enforced incremental passivity,
Y . Liu and M. Guo, “Data-driven nonlinear output regulation via data- enforced incremental passivity,”arXiv: 2506.06079, June, 2025
-
[25]
Data-driven internal model control for output regulation,
W. Liu, Y . Li, J. Sun, G. Wang, K. You, L. Xie, and J. Chen, “Data-driven internal model control for output regulation,”IEEE Trans. Cybern., May, 2025, doi: 10.1109/TCYB.2026.3690605
-
[26]
Corduneanu,Almost Periodic Oscillations and Waves
C. Corduneanu,Almost Periodic Oscillations and Waves. Springer Science & Business Media, 2009
2009
-
[27]
Data-driven control via Petersen’s lemma,
A. Bisoffi, C. De Persis, and P. Tesi, “Data-driven control via Petersen’s lemma,”Automatica, vol. 145, p. 110537, Nov. 2022. 13
2022
-
[28]
Pavlov, N
A. Pavlov, N. van de Wouw, and H. Nijmeijer,Convergent Systems: Analysis and Synthesis. Control and Observer Design for Nonlinear Finite and Infinite Dimensional Systems. Berlin, Heidelberg: Springer Berlin Heidelberg, 2005, pp. 131–146
2005
-
[29]
Approximate regulation for nonlinear systems in presence of periodic disturbances,
D. Astolfi, L. Praly, and L. Marconi, “Approximate regulation for nonlinear systems in presence of periodic disturbances,” inProc. IEEE Conf. Decis. Control, Osaka, Japan, Dec. 2015, pp. 7665–7670
2015
-
[30]
Data-driven output synchronization of heterogeneous leader- follower multi-agent systems,
J. Jiao, H. J. van Waarde, H. L. Trentelman, M. K. Camlibel, and S. Hirche, “Data-driven output synchronization of heterogeneous leader- follower multi-agent systems,” inProc. IEEE Conf. Decis. Control, Austin, TX, USA, Dec. 2021, pp. 466–471
2021
-
[31]
Learning to fly-a gym environment with pybullet physics for reinforce- ment learning of multi-agent quadcopter control,
J. Panerati, H. Zheng, S. Zhou, J. Xu, A. Prorok, and A. P. Schoellig, “Learning to fly-a gym environment with pybullet physics for reinforce- ment learning of multi-agent quadcopter control,” inProc. IEEE/RSJ Intern. Conf. Intell. Robots Syst., 2021, pp. 7512–7519
2021
-
[32]
Multiple observers based anti-disturbance control for a quadrotor uav against payload and wind disturbances,
K. Guo, J. Jia, X. Yu, L. Guo, and L. Xie, “Multiple observers based anti-disturbance control for a quadrotor uav against payload and wind disturbances,”Control Eng. Pract., vol. 102, p. 104560, Sept. 2020
2020
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.