Mobile Pedipulation for Object Sliding via Hierarchical Control on a Wheeled Bipedal Robot
Pith reviewed 2026-06-26 20:24 UTC · model grok-4.3
The pith
A wheeled bipedal robot can slide objects with its legs by using a hierarchical NMPC on a reduced three-body model that handles hip roll and contact modes.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
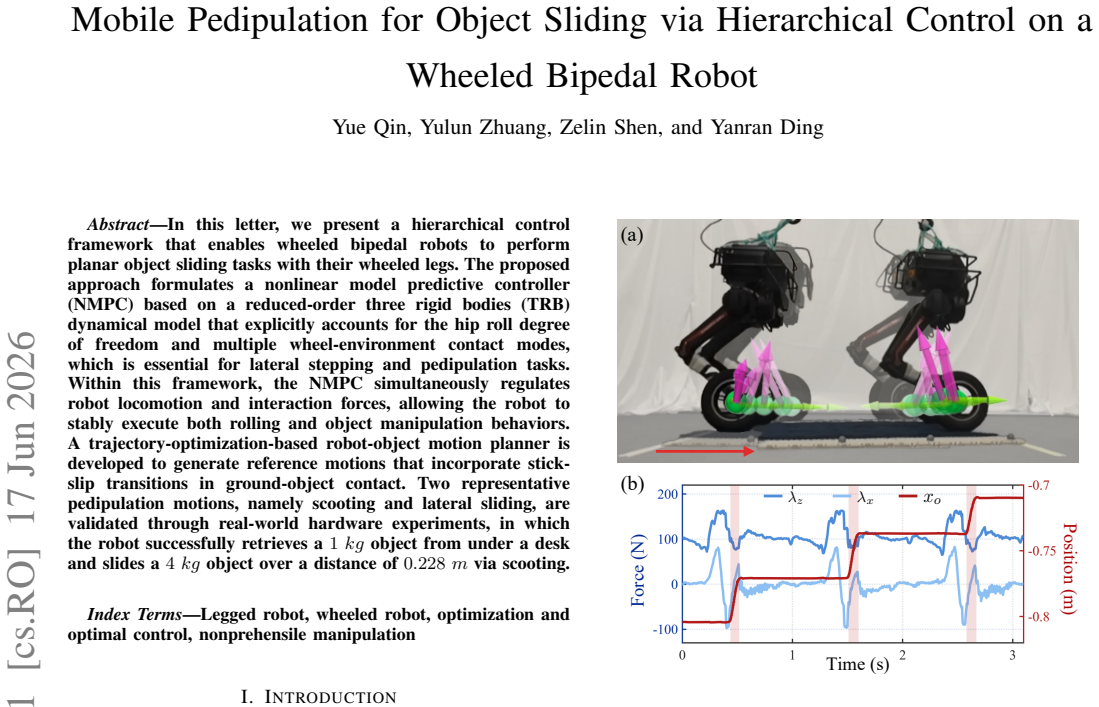
The proposed approach formulates a nonlinear model predictive controller (NMPC) based on a reduced-order three rigid bodies (TRB) dynamical model that explicitly accounts for the hip roll degree of freedom and multiple wheel-environment contact modes, which is essential for lateral stepping and pedipulation tasks. Within this framework, the NMPC simultaneously regulates robot locomotion and interaction forces, allowing the robot to stably execute both rolling and object manipulation behaviors. A trajectory-optimization-based robot-object motion planner is developed to generate reference motions that incorporate stick-slip transitions in ground-object contact.
What carries the argument
Nonlinear model predictive controller (NMPC) based on a reduced-order three rigid bodies (TRB) dynamical model that includes hip roll and discrete wheel-environment contact modes.
If this is right
- The NMPC simultaneously regulates locomotion and interaction forces to support both rolling motion and object manipulation.
- The trajectory-optimization planner produces reference motions that include stick-slip transitions at the object-ground interface.
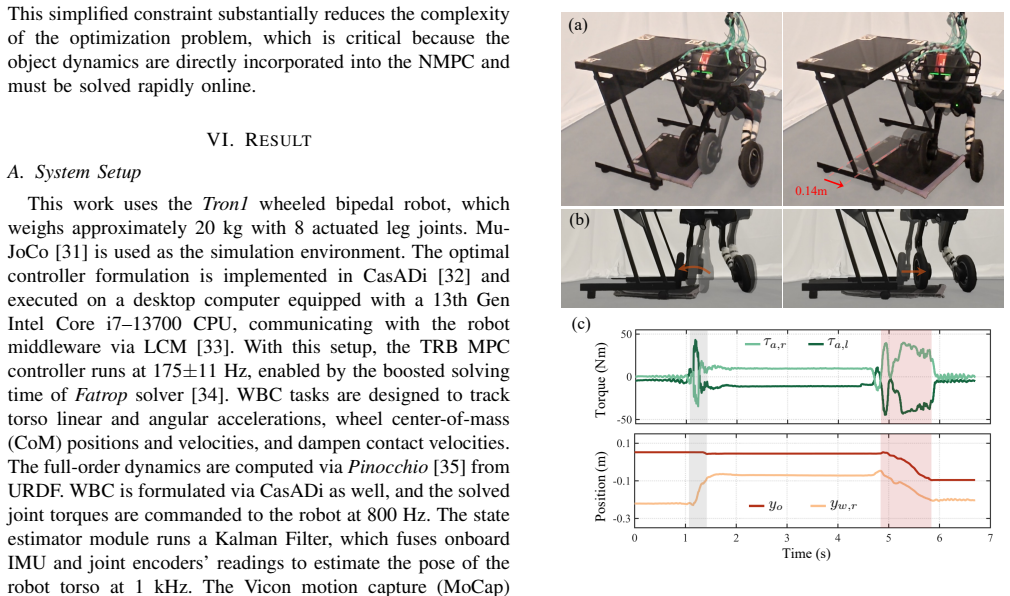
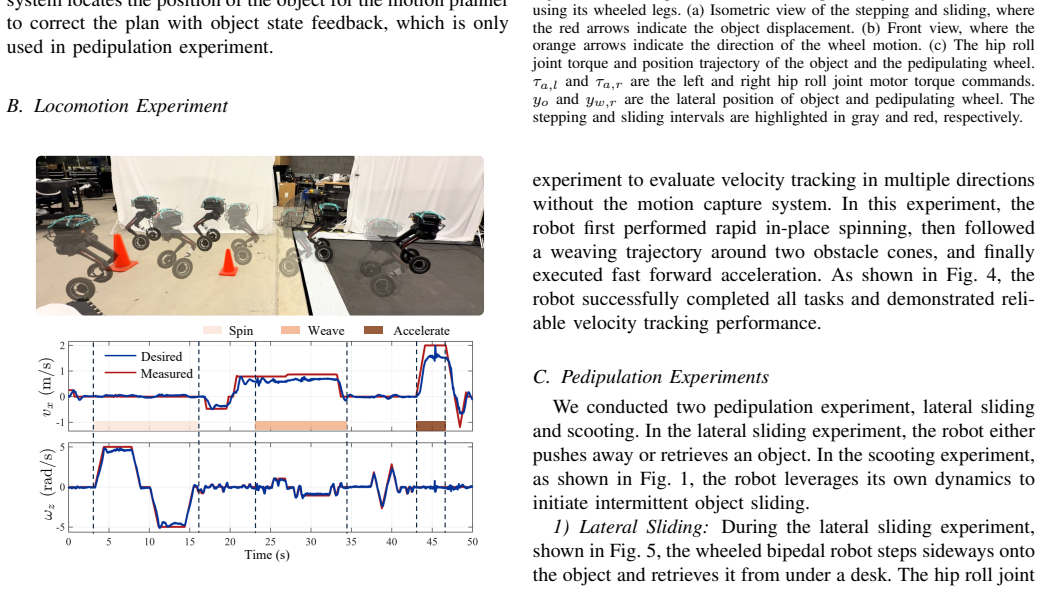
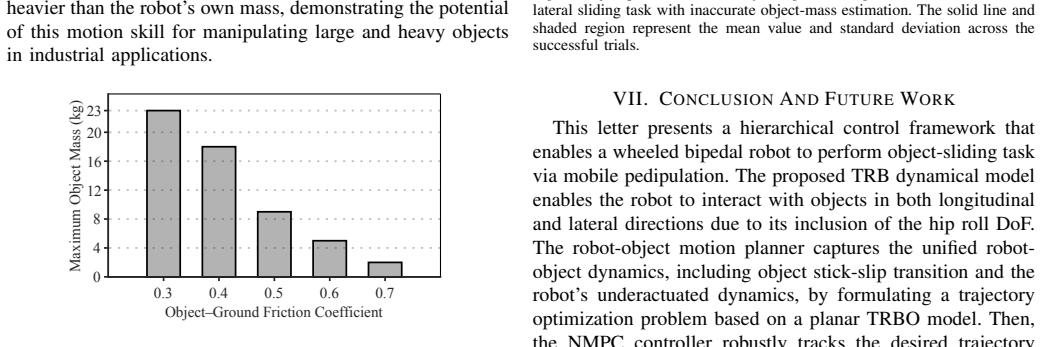
- Real hardware experiments demonstrate retrieval of a 1 kg object from under a desk and sliding of a 4 kg object over 0.228 m.
Where Pith is reading between the lines
- The same reduced-model approach could be tested on tasks that require repeated direction changes while maintaining object contact.
- Adding explicit friction estimation to the planner might improve performance when surface conditions vary during a single slide.
- The hierarchical split between planner and NMPC could be applied to other wheeled platforms that lack dedicated manipulators.
Load-bearing premise
The reduced-order TRB model with explicit hip roll and discrete contact modes is accurate enough to support stable combined locomotion and force regulation on real hardware.
What would settle it
Repeated loss of balance or failure to achieve the planned sliding distance with the 4 kg object during hardware trials under identical conditions would show the model is not sufficiently accurate.
Figures
read the original abstract
In this letter, we present a hierarchical control framework that enables wheeled bipedal robots to perform planar object sliding tasks with their wheeled legs. The proposed approach formulates a nonlinear model predictive controller (NMPC) based on a reduced-order three rigid bodies (TRB) dynamical model that explicitly accounts for the hip roll degree of freedom and multiple wheel-environment contact modes, which is essential for lateral stepping and pedipulation tasks. Within this framework, the NMPC simultaneously regulates robot locomotion and interaction forces, allowing the robot to stably execute both rolling and object manipulation behaviors. A trajectory-optimization-based robot-object motion planner is developed to generate reference motions that incorporate stick-slip transitions in ground-object contact. Two representative pedipulation motions, namely scooting and lateral sliding, are validated through real-world hardware experiments, in which the robot successfully retrieves a 1 kg object from under a desk and slides a 4 kg object over a distance of 0.228 m via scooting.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a hierarchical control framework for wheeled bipedal robots performing planar object sliding via pedipulation. It formulates an NMPC on a reduced-order three-rigid-body (TRB) dynamical model that includes the hip roll DOF and discrete wheel-environment contact modes, enabling simultaneous locomotion and interaction force regulation. A trajectory-optimization planner generates reference trajectories that incorporate stick-slip transitions at the ground-object interface. Hardware experiments on two tasks (scooting and lateral sliding) are reported, including successful retrieval of a 1 kg object from under a desk and sliding of a 4 kg object over 0.228 m.
Significance. If the results hold, the work advances mobile manipulation for wheeled bipeds by showing that an explicit reduced-order model with hip roll and multi-mode contacts can support stable combined locomotion and force-regulated pedipulation in real hardware. The concrete task demonstrations (object retrieval and sliding) provide direct evidence of practical utility; the absence of parameter fitting or self-referential definitions in the core formulation is a positive feature.
major comments (1)
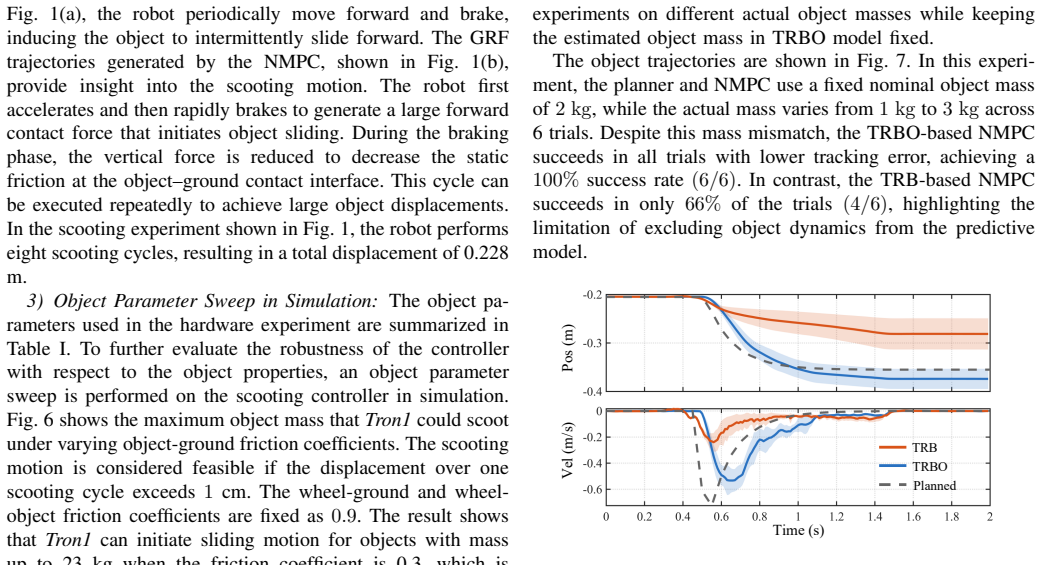
- [Experiments] Experiments section: the manuscript reports task success (1 kg retrieval, 4 kg slide over 0.228 m) but supplies no quantitative metrics such as RMS position or force tracking error, success rate across trials, or comparison against a baseline controller without the hip-roll term; these data are needed to substantiate that the TRB model with explicit hip roll is load-bearing for the claimed stability.
minor comments (2)
- [Abstract] Abstract and introduction: the phrase 'multiple wheel-environment contact modes' is used without an early reference to the specific mode set or switching logic; a forward pointer to the relevant model section would improve readability.
- Notation: the TRB model is introduced as 'reduced-order' but the reduction steps (which states or contacts are eliminated) are not summarized in one location; a short table or paragraph listing retained vs. neglected dynamics would clarify the modeling choices.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and positive assessment of our work. We address the single major comment below and have prepared revisions to the experiments section accordingly.
read point-by-point responses
-
Referee: [Experiments] Experiments section: the manuscript reports task success (1 kg retrieval, 4 kg slide over 0.228 m) but supplies no quantitative metrics such as RMS position or force tracking error, success rate across trials, or comparison against a baseline controller without the hip-roll term; these data are needed to substantiate that the TRB model with explicit hip roll is load-bearing for the claimed stability.
Authors: We agree that additional quantitative metrics would strengthen the presentation. In the revised manuscript we will report RMS position and force tracking errors computed from the logged hardware data for both the 1 kg retrieval and 4 kg sliding tasks, together with the number of successful trials out of the total attempts performed. A direct baseline comparison that disables the hip-roll DOF is not feasible without fundamentally changing the TRB model and the contact-mode formulation; the hip-roll degree of freedom is required to generate the lateral forces and stepping motions demonstrated in the experiments. We will add a short paragraph in the experiments section explaining this modeling choice and why the reported tasks cannot be executed without it. revision: partial
Circularity Check
No significant circularity
full rationale
The paper's central claim is a hierarchical NMPC formulation on an explicit TRB reduced-order model with hip-roll and discrete contact modes, validated directly by hardware experiments (1 kg retrieval, 4 kg slide over 0.228 m). No equations, fitted parameters, or self-citations are shown to reduce the claimed performance or model accuracy to the inputs by construction. The derivation chain remains independent of the target results.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
LQR-assisted whole-body control of a wheeled bipedal robot with kinematic loops,
V . Klemm, A. Morra, L. Gulich, D. Mannhart, D. Rohr, M. Kamel, Y . de Viragh, and R. Siegwart, “LQR-assisted whole-body control of a wheeled bipedal robot with kinematic loops,”IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 3745–3752, 2020
2020
-
[2]
Modeling and MPC-based pose tracking for wheeled bipedal robot,
J. Yu, Z. Zhu, J. Lu, S. Yin, and Y . Zhang, “Modeling and MPC-based pose tracking for wheeled bipedal robot,”IEEE Robotics and Automation Letters, vol. 8, no. 12, pp. 7881–7888, 2023
2023
-
[3]
Whole-body motion generation for wheeled biped robots based on hierarchical MPC,
H. Yu, S. Guan, X. Li, H. Feng, S. Zhang, and Y . Fu, “Whole-body motion generation for wheeled biped robots based on hierarchical MPC,” IEEE Transactions on Industrial Electronics, 2025
2025
-
[4]
Enhanced robust locomotion of wheeled-bipedal robot via hierarchical optimization and online wheel position planning,
Y . Wang, T. Chen, S. Xu, X. Rong, G. Zhang, Y . Xin, and Y . Li, “Enhanced robust locomotion of wheeled-bipedal robot via hierarchical optimization and online wheel position planning,”IEEE Robotics and Automation Letters, 2025
2025
-
[5]
Design and control of a bio-inspired wheeled bipedal robot,
H. Zhao, L. Yu, S. Qin, G. Jin, and Y . Chen, “Design and control of a bio-inspired wheeled bipedal robot,”IEEE/ASME Transactions on Mechatronics, vol. 30, no. 4, pp. 2461–2472, 2025
2025
-
[6]
Design and control of SKATER: A wheeled- bipedal robot with high-speed turning robustness and terrain adaptability,
Y . Wang, T. Chen, X. Rong, G. Zhang, Y . Li, and Y . Xin, “Design and control of SKATER: A wheeled- bipedal robot with high-speed turning robustness and terrain adaptability,”IEEE/ASME Transactions on Mechatronics, vol. 30, no. 2, pp. 1310–1321, 2025
2025
-
[7]
Online dynamic motion planning and control for wheeled biped robots,
S. Xin and S. Vijayakumar, “Online dynamic motion planning and control for wheeled biped robots,” in2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2020, pp. 3892–3899
2020
-
[8]
Underactuated motion planning and control for jumping with wheeled- bipedal robots,
H. Chen, B. Wang, Z. Hong, C. Shen, P. M. Wensing, and W. Zhang, “Underactuated motion planning and control for jumping with wheeled- bipedal robots,”IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 747–754, 2021
2021
-
[9]
Height control and optimal torque planning for jumping with wheeled-bipedal robots,
Y . Zhuang, Y . Xu, B. Huang, M. Chao, G. Shi, X. Yang, K. Zhang, and C. Fu, “Height control and optimal torque planning for jumping with wheeled-bipedal robots,” in2021 6th IEEE International Conference on Advanced Robotics and Mechatronics (ICARM). IEEE, 2021, pp. 477–482
2021
-
[10]
Ascento: A two- wheeled jumping robot,
V . Klemm, A. Morra, C. Salzmann, F. Tschopp, K. Bodie, L. Gulich, N. K¨ung, D. Mannhart, C. Pfister, M. Vierneiselet al., “Ascento: A two- wheeled jumping robot,” in2019 International conference on robotics and automation (ICRA). IEEE, 2019, pp. 7515–7521
2019
-
[11]
Pedipulate: Enabling manipulation skills using a quadruped robot’s leg,
P. Arm, M. Mittal, H. Kolvenbach, and M. Hutter, “Pedipulate: Enabling manipulation skills using a quadruped robot’s leg,” in2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 5717–5723
2024
-
[12]
Locoman: Advancing versatile quadrupedal dexterity with lightweight loco-manipulators,
C. Lin, X. Liu, Y . Yang, Y . Niu, W. Yu, T. Zhang, J. Tan, B. Boots, and D. Zhao, “Locoman: Advancing versatile quadrupedal dexterity with lightweight loco-manipulators,” in2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2024, pp. 6877–6884
2024
-
[13]
A motion planning approach for nonprehensile manipulation and locomotion tasks of a legged robot,
G. Zhang, S. Ma, Y . Shen, and Y . Li, “A motion planning approach for nonprehensile manipulation and locomotion tasks of a legged robot,” IEEE Transactions on Robotics, vol. 36, no. 3, pp. 855–874, 2020
2020
-
[14]
A mobile manipulator,
M. T. Mason, D. K. Pai, D. Rus, L. R. Taylor, and M. A. Erdmann, “A mobile manipulator,” inProceedings 1999 IEEE International Con- ference on Robotics and Automation (Cat. No. 99CH36288C), vol. 3. IEEE, 1999, pp. 2322–2327
1999
-
[15]
Experiments with nonholonomic manipulation,
S. S. Srinivasa, C. R. Baker, E. Sacks, G. B. Reshko, M. T. Mason, and M. A. Erdmann, “Experiments with nonholonomic manipulation,” inProceedings 2002 IEEE International Conference on Robotics and Automation (Cat. No. 02CH37292), vol. 2. IEEE, 2002, pp. 2042– 2047
2002
-
[16]
Precise object sliding with top contact via asymmetric dual limit surfaces,
X. Yi and N. Fazeli, “Precise object sliding with top contact via asymmetric dual limit surfaces,” inProceedings of Robotics: Science and Systems, July 2024
2024
-
[17]
Dynamic on-palm manipulation via controlled sliding,
W. Yang and M. Posa, “Dynamic on-palm manipulation via controlled sliding,” inProceedings of Robotics: Science and Systems, July 2024
2024
-
[18]
Practical force-motion models for sliding manipulation,
R. D. Howe and M. R. Cutkosky, “Practical force-motion models for sliding manipulation,”The International Journal of Robotics Research, vol. 15, no. 6, pp. 557–572, 1996
1996
-
[19]
A unified mpc framework for whole-body dynamic locomotion and manipulation,
J.-P. Sleiman, F. Farshidian, M. V . Minniti, and M. Hutter, “A unified mpc framework for whole-body dynamic locomotion and manipulation,” IEEE Robotics and Automation Letters, vol. 6, no. 3, pp. 4688–4695, 2021
2021
-
[20]
Dynamic loco- manipulation on HECTOR: Humanoid for enhanced control and open- source research,
J. Li, J. Ma, O. Kolt, M. Shah, and Q. Nguyen, “Dynamic loco- manipulation on HECTOR: Humanoid for enhanced control and open- source research,”arXiv preprint arXiv:2312.11868, 2023
-
[21]
Representation- free model predictive control for dynamic motions in quadrupeds,
Y . Ding, A. Pandala, C. Li, Y .-H. Shin, and H.-W. Park, “Representation- free model predictive control for dynamic motions in quadrupeds,”IEEE Transactions on Robotics, vol. 37, no. 4, pp. 1154–1171, 2021
2021
-
[22]
Real-time model predictive control for versatile dynamic motions in quadrupedal robots,
Y . Ding, A. Pandala, and H.-W. Park, “Real-time model predictive control for versatile dynamic motions in quadrupedal robots,” in2019 International Conference on Robotics and Automation (ICRA). IEEE, 2019, pp. 8484–8490
2019
-
[23]
Kinodynamic model predictive control for energy efficient locomotion of legged robots with parallel elasticity,
Y . Zhuang, Y . Wang, and Y . Ding, “Kinodynamic model predictive control for energy efficient locomotion of legged robots with parallel elasticity,” in2025 IEEE International Conference on Robotics and Automation (ICRA), 2025, pp. 12 365–12 371
2025
-
[24]
Dynamic locomotion in the MIT Cheetah 3 through convex model-predictive control,
J. Di Carlo, P. M. Wensing, B. Katz, G. Bledt, and S. Kim, “Dynamic locomotion in the MIT Cheetah 3 through convex model-predictive control,” in2018 IEEE/RSJ international conference on intelligent robots and systems (IROS). IEEE, 2018, pp. 1–9
2018
-
[25]
On the implementation of an interior- point filter line-search algorithm for large-scale nonlinear programming,
A. W ¨achter and L. T. Biegler, “On the implementation of an interior- point filter line-search algorithm for large-scale nonlinear programming,” Mathematical programming, vol. 106, no. 1, pp. 25–57, 2006
2006
-
[26]
Highly dynamic quadruped locomotion via whole-body impulse control and model predictive control,
D. Kim, J. Di Carlo, B. Katz, G. Bledt, and S. Kim, “Highly dynamic quadruped locomotion via whole-body impulse control and model predictive control,”arXiv preprint arXiv:1909.06586, 2019
-
[27]
Humanoid self- collision avoidance using whole-body control with control barrier func- tions,
C. Khazoom, D. Gonzalez-Diaz, Y . Ding, and S. Kim, “Humanoid self- collision avoidance using whole-body control with control barrier func- tions,” in2022 IEEE-RAS 21st International Conference on Humanoid Robots (Humanoids). IEEE, 2022, pp. 558–565
2022
-
[28]
ProxQP: an efficient and versatile quadratic programming solver for real-time robotics applications and beyond,
A. Bambade, F. Schramm, S. El-Kazdadi, S. Caron, A. Taylor, and J. Carpentier, “ProxQP: an efficient and versatile quadratic programming solver for real-time robotics applications and beyond,”IEEE Transac- tions on Robotics, 2025
2025
-
[29]
Direct trajectory optimization using nonlinear programming and collocation,
C. R. Hargraves and S. W. Paris, “Direct trajectory optimization using nonlinear programming and collocation,”Journal of guidance, control, and dynamics, vol. 10, no. 4, pp. 338–342, 1987
1987
-
[30]
Model hierarchy predictive control of robotic systems,
H. Li, R. J. Frei, and P. M. Wensing, “Model hierarchy predictive control of robotic systems,”IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 3373–3380, 2021
2021
-
[31]
MuJoCo: A physics engine for model-based control,
E. Todorov, T. Erez, and Y . Tassa, “MuJoCo: A physics engine for model-based control,” in2012 IEEE/RSJ international conference on intelligent robots and systems. IEEE, 2012, pp. 5026–5033
2012
-
[32]
CasADi: a software framework for nonlinear optimization and optimal control,
J. A. Andersson, J. Gillis, G. Horn, J. B. Rawlings, and M. Diehl, “CasADi: a software framework for nonlinear optimization and optimal control,”Mathematical Programming Computation, vol. 11, pp. 1–36, 2019
2019
-
[33]
LCM: Lightweight commu- nications and marshalling,
A. S. Huang, E. Olson, and D. C. Moore, “LCM: Lightweight commu- nications and marshalling,” in2010 IEEE/RSJ International Conference on Intelligent Robots and Systems. IEEE, 2010, pp. 4057–4062
2010
-
[34]
Fatrop: A fast constrained optimal control problem solver for robot trajectory optimization and control,
L. Vanroye, A. Sathya, J. De Schutter, and W. Decr ´e, “Fatrop: A fast constrained optimal control problem solver for robot trajectory optimization and control,” in2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2023, pp. 10 036– 10 043
2023
-
[35]
The Pinocchio C++ library – a fast and flexible implementation of rigid body dynamics algorithms and their analytical derivatives,
J. Carpentier, G. Saurel, G. Buondonno, J. Mirabel, F. Lamiraux, O. Stasse, and N. Mansard, “The Pinocchio C++ library – a fast and flexible implementation of rigid body dynamics algorithms and their analytical derivatives,” inIEEE International Symposium on System Integrations (SII), 2019
2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.