Modeling Branches for Active Manipulation using Iterative Parameter Estimation
Pith reviewed 2026-06-26 20:55 UTC · model grok-4.3
The pith
A tetrahedral finite-element model with iteratively estimated parameters from point-cloud data and observed deformations enables a motion planner to reduce branch deformation energy by 35.69 percent on average.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By building a tetrahedral branch model from point-cloud data, simulating its behavior with the finite element method, and iteratively estimating material parameters from measured deformations, the approach supplies a deformation-aware motion planner that produces manipulation paths with lower energy cost than standard planners.
What carries the argument
Iterative estimation of material parameters inside a point-cloud-derived tetrahedral finite-element model that drives a deformation-aware motion planner.
If this is right
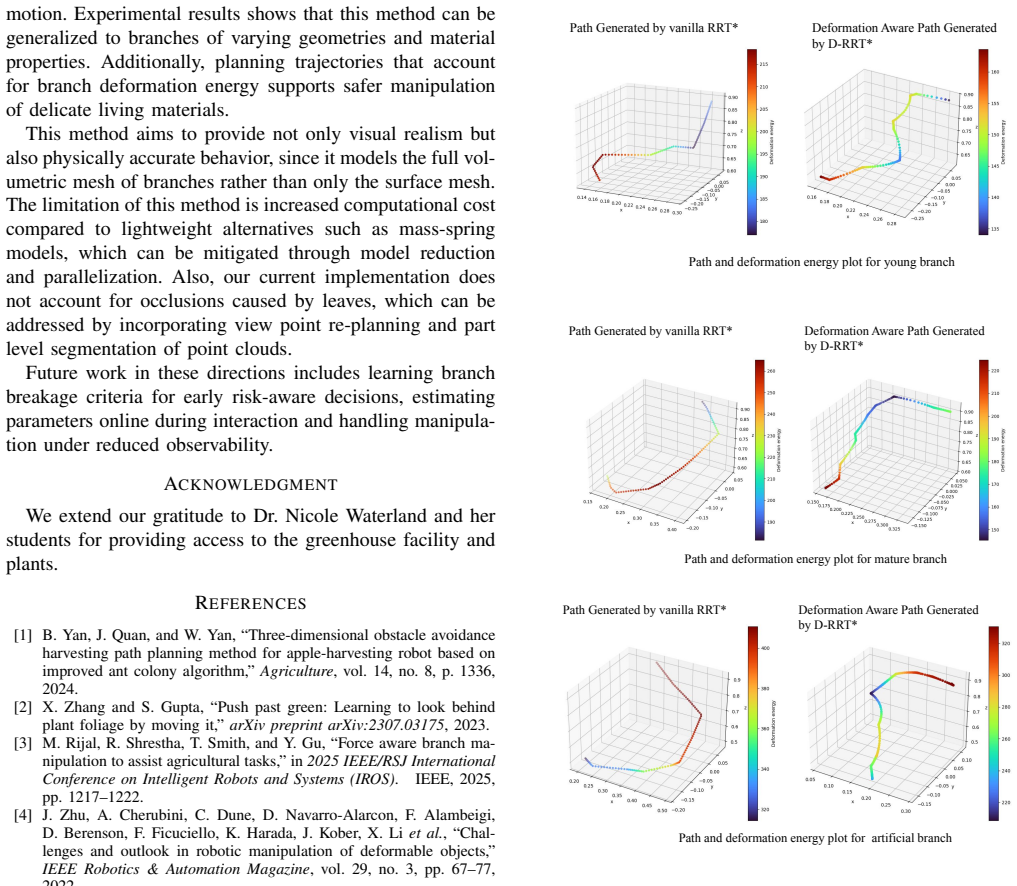
- The planner can reposition branches into another robot's field of view while keeping deformation energy lower than non-aware paths.
- The same pipeline works across branches that differ in geometry and material stiffness without manual retuning.
- Only an 8.10 percent average increase in path length accompanies the 35.69 percent energy reduction.
- Stabilization and clearing of visual obstructions become feasible with reduced risk of branch damage.
Where Pith is reading between the lines
- The same iterative estimation loop could be applied to other slender deformable objects such as vines or flexible stems once point-cloud data are available.
- Real-time re-estimation during manipulation might further reduce error when branches change properties after initial contact.
- Combining the planner with online vision feedback could close the loop between observed and predicted deformation without separate offline trials.
Load-bearing premise
The tetrahedral finite-element model with iteratively estimated parameters captures real branch deformation behavior well enough for the planner to deliver reliable energy reductions.
What would settle it
A new set of physical trials in which the model's predicted deformations deviate measurably from observed deformations or in which the planner's paths produce no energy reduction compared with baseline paths.
Figures




read the original abstract
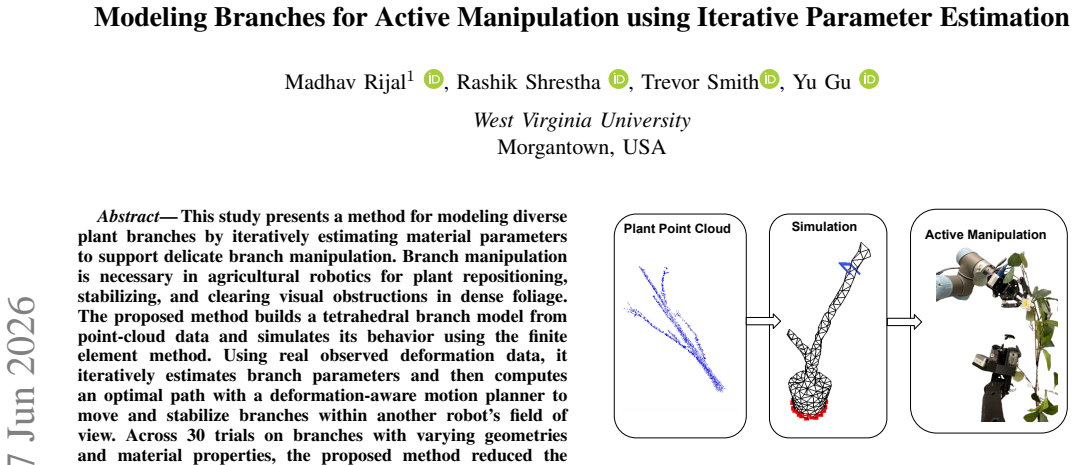
This study presents a method for modeling diverse plant branches by iteratively estimating material parameters to support delicate branch manipulation. Branch manipulation is necessary in agricultural robotics for plant repositioning, stabilizing, and clearing visual obstructions in dense foliage. The proposed method builds a tetrahedral branch model from point-cloud data and simulates its behavior using the finite element method. Using real observed deformation data, it iteratively estimates branch parameters and then computes an optimal path with a deformation-aware motion planner to move and stabilize branches within another robot's field of view. Across 30 trials on branches with varying geometries and material properties, the proposed method reduced the deformation energy by 35.69% while increasing the path length by 8.10% on average.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a method to model plant branches for robotic manipulation by constructing tetrahedral finite-element models from point-cloud data, iteratively estimating material parameters from observed real deformations, and then using a deformation-aware motion planner to generate paths that minimize deformation energy while moving branches into a target robot's field of view. Across 30 trials on branches with varying geometries and material properties, the approach is reported to reduce deformation energy by 35.69% on average while increasing path length by 8.10%.
Significance. If the FEM model with iteratively estimated parameters transfers reliably to physical branches, the framework could support more precise active manipulation tasks in agricultural robotics. The use of real observed data for parameter fitting is a constructive element that grounds the model in measurements rather than purely nominal values.
major comments (3)
- [Abstract] Abstract: The headline quantitative result (35.69% lower deformation energy across 30 trials) is obtained by executing the deformation-aware planner inside the same tetrahedral FEM whose parameters were iteratively fitted to the observed data. Because both the planner and the reported energy metric operate on this identical forward model, any optimizing trajectory is guaranteed to exhibit lower energy within the model; the manuscript must clarify whether the 30 trials include physical hardware validation or are simulation-only.
- [Abstract] Abstract / Results: No error bars, statistical tests (e.g., paired t-test or Wilcoxon), trial-selection criteria, or explicit baseline planner details are supplied for the 30 trials. Without these, the reported averages cannot be assessed for robustness or effect size.
- [Methods (parameter estimation and planning sections)] The central assumption that the tetrahedral FEM with fitted parameters sufficiently captures real branch deformation for reliable planner transfer is stated but not tested against independent physical measurements beyond the fitting data itself.
minor comments (1)
- [Abstract] The abstract states gains from '30 trials' but does not specify the distribution of branch geometries or material properties; a table or figure summarizing these would improve reproducibility.
Simulated Author's Rebuttal
We thank the referee for their constructive comments, which highlight important aspects of validation and presentation. We address each major comment below and indicate planned revisions.
read point-by-point responses
-
Referee: [Abstract] Abstract: The headline quantitative result (35.69% lower deformation energy across 30 trials) is obtained by executing the deformation-aware planner inside the same tetrahedral FEM whose parameters were iteratively fitted to the observed data. Because both the planner and the reported energy metric operate on this identical forward model, any optimizing trajectory is guaranteed to exhibit lower energy within the model; the manuscript must clarify whether the 30 trials include physical hardware validation or are simulation-only.
Authors: We agree that clarification is needed. The 30 trials are performed entirely in simulation using the fitted tetrahedral FEM as the forward model; parameter estimation draws on real observed deformation data collected from physical branches, but the planner optimization and energy metric are evaluated within that same simulation. We will revise the abstract and results to explicitly state that the quantitative comparisons are simulation-based while noting the grounding of parameters in real data. revision: yes
-
Referee: [Abstract] Abstract / Results: No error bars, statistical tests (e.g., paired t-test or Wilcoxon), trial-selection criteria, or explicit baseline planner details are supplied for the 30 trials. Without these, the reported averages cannot be assessed for robustness or effect size.
Authors: We acknowledge the omission. The revised manuscript will add standard deviation error bars to the reported averages, include a paired statistical test (t-test or Wilcoxon signed-rank) with p-values, describe trial selection criteria (branch geometries, material variation, and data collection protocol), and provide explicit details on the baseline planner (a standard RRT-based planner without deformation awareness). revision: yes
-
Referee: [Methods (parameter estimation and planning sections)] The central assumption that the tetrahedral FEM with fitted parameters sufficiently captures real branch deformation for reliable planner transfer is stated but not tested against independent physical measurements beyond the fitting data itself.
Authors: This correctly identifies a scope limitation. The work demonstrates iterative fitting from real deformation observations and evaluates the planner inside the resulting model; no independent physical execution of planned trajectories (with new deformation measurements) is performed. We will expand the discussion section to explicitly note this assumption and its implications, framing independent physical transfer validation as valuable future work. revision: partial
Circularity Check
No significant circularity detected
full rationale
The provided abstract and context describe iterative parameter estimation from real observed deformation data to build a tetrahedral FEM, followed by deformation-aware planning and reporting of empirical trial results (35.69% energy reduction). No equations, self-citations, or self-definitional steps are quoted that reduce the central result to the fitted inputs by construction. The derivation relies on external physical observations for fitting and evaluation, remaining self-contained against the listed circularity patterns.
Axiom & Free-Parameter Ledger
free parameters (1)
- branch material parameters (stiffness, damping, etc.)
axioms (1)
- domain assumption Tetrahedral mesh from point cloud plus linear FEM accurately represents branch geometry and deformation physics.
Reference graph
Works this paper leans on
-
[1]
Three-dimensional obstacle avoidance harvesting path planning method for apple-harvesting robot based on improved ant colony algorithm,
B. Yan, J. Quan, and W. Yan, “Three-dimensional obstacle avoidance harvesting path planning method for apple-harvesting robot based on improved ant colony algorithm,”Agriculture, vol. 14, no. 8, p. 1336, 2024
2024
-
[2]
Push past green: Learning to look behind plant foliage by moving it,
X. Zhang and S. Gupta, “Push past green: Learning to look behind plant foliage by moving it,”arXiv preprint arXiv:2307.03175, 2023
-
[3]
Force aware branch ma- nipulation to assist agricultural tasks,
M. Rijal, R. Shrestha, T. Smith, and Y . Gu, “Force aware branch ma- nipulation to assist agricultural tasks,” in2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2025, pp. 1217–1222
2025
-
[4]
Chal- lenges and outlook in robotic manipulation of deformable objects,
J. Zhu, A. Cherubini, C. Dune, D. Navarro-Alarcon, F. Alambeigi, D. Berenson, F. Ficuciello, K. Harada, J. Kober, X. Liet al., “Chal- lenges and outlook in robotic manipulation of deformable objects,” IEEE Robotics & Automation Magazine, vol. 29, no. 3, pp. 67–77, 2022
2022
-
[5]
Zhuang,Real-time simulation of physically realistic global defor- mations
Y . Zhuang,Real-time simulation of physically realistic global defor- mations. University of California, Berkeley, 2000
2000
-
[6]
A survey on position based dynamics, 2017,
J. Bender, M. M ¨uller, and M. Macklin, “A survey on position based dynamics, 2017,”Proceedings of the European association for com- puter graphics: tutorials, pp. 1–31, 2017
2017
-
[7]
Modeling of deformable objects for robotic manipulation: A tutorial and review,
V . E. Arriola-Rios, P. Guler, F. Ficuciello, D. Kragic, B. Siciliano, and J. L. Wyatt, “Modeling of deformable objects for robotic manipulation: A tutorial and review,”Frontiers in Robotics and AI, vol. 7, p. 82, 2020
2020
-
[8]
Prusinkiewicz and A
P. Prusinkiewicz and A. Lindenmayer,The algorithmic beauty of plants. Springer Science & Business Media, 2012
2012
-
[9]
Modeling trees with a space colonization algorithm
A. Runions, B. Lane, and P. Prusinkiewicz, “Modeling trees with a space colonization algorithm.”Nph, vol. 7, no. 63-70, p. 6, 2007
2007
-
[10]
Creation and rendering of realistic trees,
J. Weber and J. Penn, “Creation and rendering of realistic trees,” in Proceedings of the 22nd annual conference on Computer graphics and interactive techniques, 1995, pp. 119–128
1995
-
[11]
Learning to reconstruct botanical trees from single images,
B. Li, J. Kału ˙zny, J. Klein, D. L. Michels, W. Pałubicki, B. Benes, and S. Pirk, “Learning to reconstruct botanical trees from single images,” ACM Transactions on Graphics (TOG), vol. 40, no. 6, pp. 1–15, 2021
2021
-
[12]
Deeptree: Modeling trees with situated latents,
X. Zhou, B. Li, B. Benes, S. Fei, and S. Pirk, “Deeptree: Modeling trees with situated latents,”IEEE Transactions on Visualization and Computer Graphics, vol. 30, no. 8, pp. 5795–5809, 2023
2023
-
[13]
Cropcraft: Inverse procedural modeling for 3d reconstruction of crop plants,
A. J. Zhai, X. Wang, K. Li, Z. Jiang, J. Zhou, S. Wang, Z. Jin, K. Guan, and S. Wang, “Cropcraft: Inverse procedural modeling for 3d reconstruction of crop plants,”arXiv preprint arXiv:2411.09693, 2024. Deformation Aware Path Generated by D-RRT* Path Generated by vanilla RRT* Path and deformation energy plot for young branch Deformation Aware Path Generat...
-
[14]
Demeter: A parametric model of crop plant morphology from the real world,
T. Cheng, A. J. Zhai, E. Z. Chen, R. Zhou, Y . Deng, Z. Li, K. Zhao, J. Shiu, Q. Zhao, Y . Xuet al., “Demeter: A parametric model of crop plant morphology from the real world,” inProceedings of the IEEE/CVF International Conference on Computer Vision, 2025, pp. 28 740–28 751
2025
-
[15]
Fast automatic precision tree models from terrestrial laser scanner data,
P. Raumonen, M. Kaasalainen, M. ˚Akerblom, S. Kaasalainen, H. Kaartinen, M. Vastaranta, M. Holopainen, M. Disney, and P. Lewis, “Fast automatic precision tree models from terrestrial laser scanner data,”Remote Sensing, vol. 5, no. 2, pp. 491–520, 2013
2013
-
[16]
Adtree: Accurate, detailed, and automatic modelling of laser-scanned trees,
S. Du, R. Lindenbergh, H. Ledoux, J. Stoter, and L. Nan, “Adtree: Accurate, detailed, and automatic modelling of laser-scanned trees,” Remote Sensing, vol. 11, no. 18, p. 2074, 2019
2074
-
[17]
Cherrypicker: Semantic skeletonization and topological reconstruction of cherry trees,
L. Meyer, A. Gilson, O. Scholz, and M. Stamminger, “Cherrypicker: Semantic skeletonization and topological reconstruction of cherry trees,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2023, pp. 6244–6253
2023
-
[18]
Tree skeletonization from 3d point clouds by denoising diffusion,
E. A. Marks, L. Nunes, F. Magistri, M. Sodano, R. Marcuzzi, L. Zimmermann, J. Behley, and C. Stachniss, “Tree skeletonization from 3d point clouds by denoising diffusion,” inProceedings of the IEEE/CVF International Conference on Computer Vision, 2025, pp. 27 607–27 617
2025
-
[19]
Crown structure and wood properties: influence on tree sway and response to high winds,
D. Sellier and T. Fourcaud, “Crown structure and wood properties: influence on tree sway and response to high winds,”American journal of botany, vol. 96, no. 5, pp. 885–896, 2009
2009
-
[20]
Visual 3d reconstruction and dynamic simulation of fruit trees for robotic manipulation,
F. Yandun, A. Silwal, and G. Kantor, “Visual 3d reconstruction and dynamic simulation of fruit trees for robotic manipulation,” in Proceedings of the IEEE/CVF conference on computer vision and pattern recognition workshops, 2020, pp. 54–55
2020
-
[21]
Vision-guided targeted grasping and vibration for robotic pollination in controlled environments,
J. Jeong, T.-A. Vu, R. Lahoti, J. Wang, V . Alumootil, S. Kim, and M. K. Jawed, “Vision-guided targeted grasping and vibration for robotic pollination in controlled environments,”arXiv preprint arXiv:2510.06146, 2025
-
[22]
Gazebo plants: Simulating plant-robot interaction with cosserat rods,
J. Deng, S. Marri, J. Klein, W. Pałubicki, S. Pirk, G. Chowdhary, and D. L. Michels, “Gazebo plants: Simulating plant-robot interaction with cosserat rods,”arXiv preprint arXiv:2402.02570, 2024
-
[23]
Precision fruit tree pruning using a learned hybrid vision/interaction controller,
A. You, H. Kolano, N. Parayil, C. Grimm, and J. R. Davidson, “Precision fruit tree pruning using a learned hybrid vision/interaction controller,” in2022 international conference on robotics and automa- tion (ICRA). IEEE, 2022, pp. 2280–2286
2022
-
[24]
Rice: Reactive inter- action controller for cluttered canopy environment,
N. H. Parayil, T. Peynot, and C. Lehnert, “Rice: Reactive inter- action controller for cluttered canopy environment,”arXiv preprint arXiv:2506.10383, 2025
-
[25]
Towards robotic tree manipulation: Leveraging graph representations,
C. H. Kim, M. Lee, O. Kroemer, and G. Kantor, “Towards robotic tree manipulation: Leveraging graph representations,” in2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 11 884–11 890
2024
-
[26]
Learning to simulate tree-branch dynamics for manipulation,
J. Jacob, T. Bandyopadhyay, J. Williams, P. Borges, and F. Ramos, “Learning to simulate tree-branch dynamics for manipulation,”IEEE Robotics and Automation Letters, vol. 9, no. 2, pp. 1748–1755, 2024
2024
-
[27]
Gentle manipulation of tree branches: A contact-aware policy learn- ing approach,
J. Jacob, S. Cai, P. V . K. Borges, T. Bandyopadhyay, and F. Ramos, “Gentle manipulation of tree branches: A contact-aware policy learn- ing approach,” in8th Annual Conference on Robot Learning, 2024
2024
-
[28]
Find the fruit: Zero-shot sim2real rl for occlusion-aware plant manipulation,
N. Subedi, H.-J. Yang, D. K. Jha, and S. Sarkar, “Find the fruit: Zero-shot sim2real rl for occlusion-aware plant manipulation,”arXiv preprint arXiv:2505.16547, 2025
-
[29]
Structure-from-motion revisited,
J. L. Schonberger and J.-M. Frahm, “Structure-from-motion revisited,” inProceedings of the IEEE conference on computer vision and pattern recognition, 2016, pp. 4104–4113
2016
-
[30]
Point cloud skeletons via laplacian based contraction,
J. Cao, A. Tagliasacchi, M. Olson, H. Zhang, and Z. Su, “Point cloud skeletons via laplacian based contraction,” in2010 Shape Modeling International Conference. IEEE, 2010, pp. 187–197
2010
-
[31]
The ball-pivoting algorithm for surface reconstruction,
F. Bernardini, J. Mittleman, H. Rushmeier, C. Silva, and G. Taubin, “The ball-pivoting algorithm for surface reconstruction,”IEEE trans- actions on visualization and computer graphics, vol. 5, no. 4, pp. 349–359, 1999
1999
-
[32]
Poisson surface recon- struction,
M. Kazhdan, M. Bolitho, and H. Hoppe, “Poisson surface recon- struction,” inProceedings of the fourth Eurographics symposium on Geometry processing, vol. 7, no. 4, 2006
2006
-
[33]
Fast tetrahedral meshing in the wild,
Y . Hu, T. Schneider, B. Wang, D. Zorin, and D. Panozzo, “Fast tetrahedral meshing in the wild,”ACM Siggraph, 2020
2020
-
[34]
Fem simulation of 3d deformable solids: a practitioner’s guide to theory, discretization and model reduction,
E. Sifakis and J. Barbic, “Fem simulation of 3d deformable solids: a practitioner’s guide to theory, discretization and model reduction,” in Acm siggraph 2012 courses, 2012, pp. 1–50
2012
-
[35]
Deformation capture and modeling of soft objects
B. Wang, L. Wu, K. Yin, U. M. Ascher, L. Liu, and H. Huang, “Deformation capture and modeling of soft objects.”ACM Trans. Graph., vol. 34, no. 4, pp. 94–1, 2015
2015
-
[36]
The free configuration space of a kirchhoff elastic rod is path-connected,
A. Borum and T. Bretl, “The free configuration space of a kirchhoff elastic rod is path-connected,” in2015 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2015, pp. 2958–2964
2015
-
[37]
G. B. Wright,Radial basis function interpolation: numerical and analytical developments. University of Colorado at Boulder, 2003
2003
-
[38]
Ultralytics yolo26,
G. Jocher and J. Qiu, “Ultralytics yolo26,” 2026. [Online]. Available: https://github.com/ultralytics/ultralytics
2026
-
[39]
A two-dimensional interpolation function for irregularly- spaced data,
D. Shepard, “A two-dimensional interpolation function for irregularly- spaced data,” inProceedings of the 1968 23rd ACM national confer- ence, 1968, pp. 517–524
1968
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.